李彬亮 韩国华
【摘要】 针对交通管理部门对车辆排队长度智能化管控的迫切要求,本文提出了一种基于多段地磁传感器的高速公路收费站排队长度检测算法。通过研究驾驶员的行为习惯及车辆跟驰行驶中特点,本文对车辆跟驰行驶区与自由行驶区、跟驰行驶区与逼近前车区的速度临界值进行了界定,分析了车辆通过地磁传感器时速度的动态变化规律,并基于地磁传感器关键数据的相关性分析,提出了均速模型。最后利用现场试验对本检测算法进行验证,试验结果证明本文提出的均速模型能够有效的估计高速公路收费站前车辆排队长度,且地磁装置成本低廉、布设方便,能够大规模的推广应用,为交通管理部门实时监控交通运行情况提供帮助。
【关键词】 地磁传感器 高速公路收费站 排队长度检测 跟驰行驶 均速模型
引言:
随着经济不断发展,我国大中城市机动车保有辆也在不断攀升,截止到2015年底,深圳市机动车保有量超过320万辆[1],车辆密度达到481辆/公里,远超270辆/公里的国际警戒线,日益增多的机动车使得城市交通压力与日俱增。研究车辆排队长度,可以有效反映城市交通运行情况,辅助交通管理部门分析决策,从而缓解城市交通拥堵以及由此带来的交通安全等问题。目前我国车辆排队长度检测方法大体可以分为三类:
通过设置磁感线圈、微波探测器、雷达等传统交通监测设备进行排队长度检测及计算。
通过GPS数据对车辆排队长度进行检测。
通过视频数据对车辆排队长度进行检测。视频检测成本低、覆盖范围广、受环境影响小,准确度也相对较高,其理论误差可以控制在8%以内[1]。
相对于以上三类车辆排队长度检测方式,地磁传感器安装尺寸小、灵敏度高、使用寿命长、对路面破坏小,且其探测机制主要利用地球磁场在铁磁物体通过时的变化进行检测,对环境要求较低,能够准确的识别车辆存在和通过车型。目前我国基于地磁传感器的车辆排队长度算法研究相对较少,其中张永终等人融合地磁检测方法设计了一种多传感器融合检测系统,实现了对各方向排队长度的检测[2];贾利民等人根据单个地磁传感器数据反馈的车辆经过时长、车头车尾时距等动态变化规律,提出了车尾时距模型、通过时间模型和综合模型,为排队长度检测提供了一个新的算法[3]。本文基于地磁传感器在高速公路收费口的实际应用,利用多车道车辆通过距离收费站200m,125m,50m地磁传感器时的波形、时长等关键信息,提出了一种的新的车辆排队长度算法。为交通管理部门及高速公路企业提供了数据支撑和决策参考。
一、多段地磁传感器排队长度检测方法
1.1 问题分析
高速公路收费站前的车辆排队行为符合车辆跟驰特点,同时由于高速公路收费站口对车辆排队长度的硬性要求以及高速公路交通流的自身特点,其车辆排队行为又具有一定的特殊性。本文以车辆跟驰行为为基础,对高速公路收费站前车辆排队情况进行类比描述。
假定所有驾驶员行为符合MISSION模型,车辆在进入收费站排队过程中分别经过无反应区(可自由行驶段),无意识反应区(跟驰行驶区)以及有意识反应区(逼近前车区),车辆跟驰行驶情况如图1。
根据Hodfs的调查,驾驶员在高速行车中会低估安全距离,在实际交通中,距离与速度不成正比[4]。故假定车辆在无反应区行驶时匀速行驶;进入无意识反应区后将根据前车减速情况开始减速,视作匀减速阶段;进入有意识反应区时,车速随着车头间距减小而减小,视作变减速阶段。通过在收费站前有间隔的设置地磁传感器,可以有效的获得车辆通过地磁传感器时的波形、时长等各项数据变化情况,从而判断不同阶段车辆的实际行驶行为,最后估算出收费站前车辆的排队长度。
1.2 参数选取
受制于地磁特点和传感器埋设方式等条件影响,当出现车辆经过地磁传感器所在断面变换车道、车辆以非正常行车方式在道路上行驶(如两条道路之间行驶)以及地磁断面1至地磁断面4之间出入口不唯一(如存在岔路)等情况时,会导致地磁传感器漏检、多检以及传输数据出现噪声数据,无法精确反映车辆通过情况。
故在前期实验中本文抽取了7天地磁数据样本,并对样本中各项数据与排队长度的相关性以及样本数据本身的容错性进行了估算,其中:
为了确定样本的有效性,在前期实验中,以基于微波检测的深圳市非节假日、高速公路同一路段的不同时间车辆行驶数据的均值作为标准,对抽取的数据样本进行独立μ检验,设显著水平ɑ = 5%。
各项特征数据与排队长度的相关性采用Spearman秩相关检验,即:将数据样本X与对应的排队长度样本Y配对形成(x1,y1),(x2,y2) (xn,yn),并将它排序,根据两个顺序样本的秩(Ri和Si)得到n对秩:(R1,S1)(R2,S2) (Rn,Sn)。有相关系数:
1.3 测距与阈值选取
根据MISSION模型,车辆在进入跟驰行驶区之前和逼近前车区时存在两个DV值(速度阈值),即SDV(驾驶员意识到正在靠近一辆低俗行驶车辆的临界点)与CLDV(跟驰过程中驾驶员意识到速度差很小但仍然靠近前车的临界点)。
为了准确的得到车辆在自由行使区、跟驰行驶区以及逼近前车区的相关数据,实验将地磁断面埋设间隔设置为50m,125m,200m。当车辆进入收费站200m检测范围内时,驾驶员将根据收费站前车辆排队情况进行减速,其中地磁断面车速判断阈值与两个临界值SDV与CLDV动态相关。
根据驾驶行为的不同程度,在有预期的平缓减速状态下,减速度的通常上限值在-2到-2.6M/S2之间。同时,受到驾驶员与车辆特性的共同制约,驾驶员从施加操纵力到出现操纵力的时间约为0.04s,驾驶员的反应时间参照表2。
表2 驾驶员反应时间及小客车制动系协调时间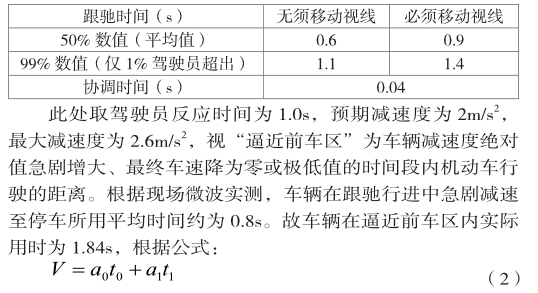
可以估算出车辆进入逼近前车区时的临界速度CLDV约为4.16m/s,故3道地磁存在一个共同的拥堵阈值fb,逼近前车区内车辆速度不高于fb,即15km/h。
同理,3道地磁受到测距(埋设点至上一埋设点的距离)远近影响,对应存在2个的畅通阈值fub,即车辆进入跟驰行驶区的临界速度SDV。根据现场微波实测,车辆在进入收费站200m检测区域时均处于减速状态,平均减速度约为0.68m/ s2,根据公式:
二、实例分析
2.1 实验数据
实验选取2015年8月2日0时至24时全天的视频检测数据数据进行参照。地磁检测系统每5分钟提取一次断面的平均车速(平均车速=每5min内通过车辆速度总和/通过车辆数 ),剔除掉高于120km/h的异常数据后,可得以时间为X轴,各地磁断面平均车速为Y轴统计图(图中D2、D3、D4速度分别为断面2、3、4的平均时速,横坐标288个刻度为5分钟间隔序号)。
根据均速模型算法,地磁检测的排队长度与视频实时排队长度对比如图4(虚线为地磁检测数据,实线为视频检测数据)。根据Spearman秩相关检验法,得地磁检测排队长度与视频检测排队长度相关度达92.3%,实验结果达到预期值。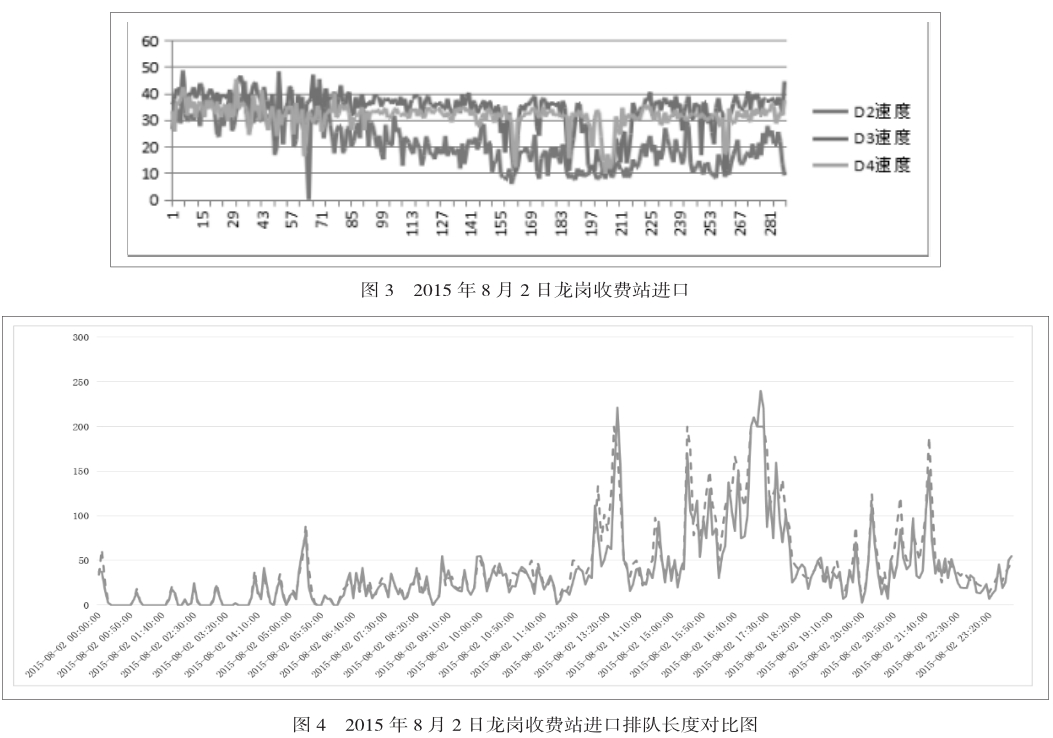
2.2 结果分析
由上述实验结果可以得出,本文提出的均速模型与现场视频检测结果高度吻合,综合实验中出现的异常情况,该均速模型受到的客观干扰主要存在以下两个方面:(1)收费站前不同车道车型不统一,需要结合车型识别对车辆经过断面产生的相对车速进行改良,减少测速扰动;(2)受到驾驶员行为影响,车辆会自动变道寻找排队长度最短车道。
在收费站前排队长度较短情况下,车辆经过外围两道地磁断面时有可能出现变道情况,带来测速异常高值,需要进一步在均速计算中剔除明显异常高值。由于受到算法影响,在断面2、3存在异常高值情况时一般在距离收费站口较近的断面1不存在车辆变道情况(已经选好车道),故对系统判断车辆真实排队长度不产生影响,鲁棒性强。
另外,本文提到的收费站口排队长度检测系统可以进一步推广到城市交叉口信号检测中,结合平均车速直接辨别有利于直接判别拥堵情况,无需复杂的算法和数据处理,对处理器运行能力要求较低,便于推广。
三、结束语
结合跟驰模型中车辆行进行为以及MISSION模型对驾驶员行为的研究,得到了基于地磁传感器判别车辆行进情况的拥堵、畅通阈值,形成了对车辆排队长度有效估计的均速模型。
通过现场试验,证明了该模型的有效性。与传统视频检测、浮动车检测、微波检测方法相比,本文提出的排队长度算法更为简单,易于实现。另外地磁传感器成本低廉,安装方便,有利于快速推广。
参 考 文 献
[1] 杨永辉,黄磊,刘昌平.基于视频分析的车辆排队长度检测[J].计算机应用研究,2011,28(3):1037-1041.
[2] 张永终,张军强,乔志龙.基于多传感器融合的排队长度检测系统设计[J].道路交通与安全,2015,15(3):23-28.
[3] 贾利民,陈娜,李海舰,董宏辉.基于单个地磁传感器融合的交叉口排队长度估计[J].吉林大学学报(工学版),2015,5,8(网络优先出版).
[4] Wiedemann R, Reiter U. Microscopic Traffic Simulation:The Simulation System MISSION. Background and Actual State CEC Project ICARUS(V1052),Final Report,1992.
[5] Ceder A. A Deterministic Traffic Flow Model for the Two Regime Approach. Transportation Research Record,1976,567.
- 毛泽东勤俭建国思想的社会化传播
- 抗日战争时期毛泽东党建思想研究综述
- 浅析儒家道德思想的当代价值
- 各类自动驾驶汽车的事故责任分配与权益保障
- 未成年人犯罪及其刑事政策分析
- 黑社会性质组织形成过程中的行为定性分析
- 恶意注册商标问题的成因及法律规制建议
- 网络短视频的著作权保护问题研究
- 论挂靠情形下滥用实际施工人权利及其法律对策
- 保姆纵火案中法律问题的梳理与评价
- 未成年人刑事犯罪特点及解决方案
- 非国家工作人员受贿罪的司法认定分析
- 浅议保险法学的两个方面
- 大数据背景下个人信息民法保护路径探析
- 浅论比较法上的隐私权及其在我国的发展
- 监察法规的法律地位及其规范体系分析
- 浅谈基于计算机网络攻击的国际法问题
- 加拿大联邦主义视野下的立法权分配和宪法司法审查
- 马克思主义法学的压舱石
- 诈骗罪与票据诈骗罪之辨析
- 论离婚损害赔偿制度的完善
- 城市房屋征收补偿制度研究
- 认罪认罚从宽制度的“罪”与“罚”
- 醉酒驾驶行为出罪问题探讨
- 论反跨国拐卖妇女儿童犯罪的法律冲突及其完善
- horse-riding
- horses
- horseshod
- horseshoe
- horseshoed
- horseshoeing
- horse-shoeing
- horseshoers
- horseshoes
- horseshoing
- horsetrading
- horse whispering
- horsewoman
- horsewomanship
- horsewomanships
- horsewomen
- horse-ˌtrading
- horsing
- horticultural
- horticulturalist
- horticulturally
- horticulture
- horticultures
- horticulturist
- horticulturists
- 身陷缧绁
- 身陷饥饿或困境而无处求援
- 身静养指甲,心静养头发
- 身非木石
- 身面有汗莫当风
- 身顸
- 身首
- 身首分离
- 身首分离身首异地
- 身首异地首足异处
- 身首异处
- 身骑两头马,脚踏两来舡
- 身骑箕尾
- 身骨
- 身骨腰板
- 身高
- 身高七尺的马
- 身高六尺的马
- 身麻着孝
- 身(心)直口快
- 身𨉈儿
- 躬
- 躬亲
- 躬体
- 躬体力行