范毅 刘宝成

【摘要】 ? ?介绍了视频雷达在某型调车辅助驾驶系统上的软件设计及应用,重点描述了该视频雷达系统的开发环境、软件功能及设计方法。
【关键词】 ? ?视频雷达 ? ?调车辅助驾驶系统 ? ?功能 ? ?设计
引言:
视频雷达是STAD系统的核心设备之一,用于获取车列前方图像信息、与障碍物的相对位置信息,GPS数据信息,并通过无线通信(WiFi或LTE)传输给車载设备。由于该产品功能和特点有一定市场需求,通过对视频雷达功能以及使用环境进行分析研究,对市场和技术两方面进行了充分调研和评估后,形成该软件设计方法。
一、视频雷达系统概述
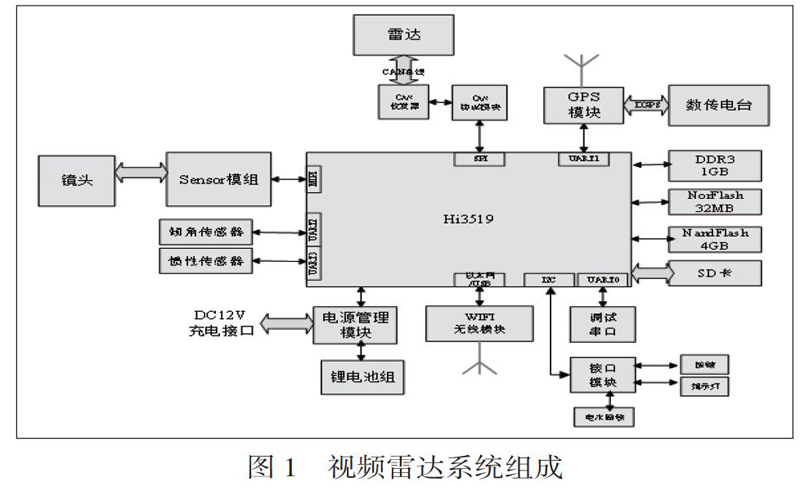
整个系统由夜视系统、雷达系统、GPS模块、无线通讯模块、电源模块和结构件组成。
1.夜视系统主要用于获取列车前方视频信息;
2.雷达系统主要用于获取列车前方障碍物信息;
3.GPS模块主要用于获取当前位置信息;
4.无线通信模块主要用于实现与车载设备之间的通信;
5.电源模块主要用于为系统提供稳定可靠的供电。
二、软件功能描述
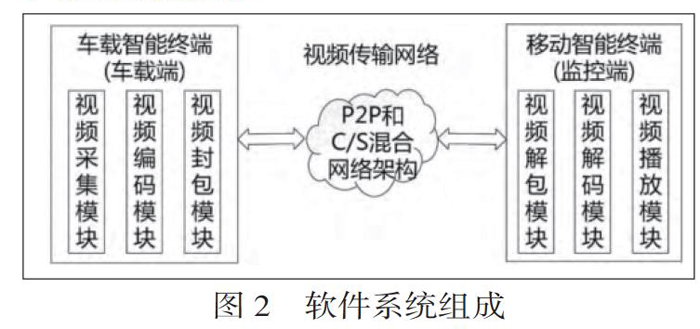
系统软件分为车载端和监控端两部分,车载端软件运行在HI3519处理器中,实现视频采集、视频编码、视频封包传输;监控端软件运行在Android智能终端负责视频解包、视频解码和视频播放。
三、开发环境简介
硬件环境:hisi3519视频主控板,外部接口包括串口,CAN接口,网络接口,IO接口,SD接口,外部设备包括雷达模块,GPS模块,4G模块,wifi模块。
软件环境:车载端:Linux +Arm开发环境,使用unbuntu16.04发布版本,编译器使用hisi提供的编译工具链;监控端:Android开发环境。
四、车载智能终端数据流程图
该软件运行在hisi3519主控板上,linux操作系统,主要实现功能是列车视频监控,雷达障碍物探测,并将障碍信息(二维坐标数据)转换到视频中,能够在视频画面中实时标记障碍物,同时把障碍物信息上传到主机端,为列车司机提供观察判断的条件。
数据流说明:
视频雷达采集到数据,分析出结果后传递给视频模块,视频模块将雷达数据坐标融合在视频画面中,通过RTSP视频流传输到PC端软件接收并实时显示,同时雷达数据和GPS数据会发送给PC端软件进行实时的数字化显示。
五、车载智能终端软件功能接口说明
5.1雷达数据采集线程RADAR_work_thread()
雷达进行障碍物坐标信息的采集,将采集到的二维坐标数据进行数据转换,雷达采集到的坐标是世界坐标系,而视频画面需要图像坐标系,因此,需要进行坐标系的转换,把雷达坐标转换到图像上,坐标转换完后,把图像坐标系提交给视频模块中OSD线程SAMPLE_RGN_VpssCoverExDynamicDisplay(),该线程会根据实时得到的坐标进行视频绿色框标记,从而实现视频目标跟踪。
5.2 GPS 数据采集线程GPS_work_recv_thread()
实现设备速度获取功能,以及时间获取功能,主要采集设备速度数据,将速度数据传输给雷达,当雷达运动时需要速度数据,同时,速度数据会通过TCP传输给PC端进行实时显示速度信息。
5.3视频采集线程SAMPLE_VENC_NORMALP_CLASSIC()
主要实现hisi3519 视频系统初始化,视频采集,编码,分辨率配置,rtsp打包发送等功能。
5.4其他工作线程OTHER_work_thread()
主要进行4G信号强度,wifi信号强度,电池电量值获取功能,其中,电池电量是通过串口读取单片机串口发送来的电量信息(电池由单片机独立控制);4G信号强度是通过给主控板发送命令,从而获取的信号强度值;wifi信号强度是通过标准网络接口获取到wifi信号强度。
5.5 Rtsp工作模块RTSP_work_start()
该模块是以库文件形式提供,该模块接口使用简单。
使用方法:caster_init(),初始化rtsp模块,配置rtsp通信端口
caster_chl_open(),启动rtsp通信通道
caster_chl_write_video()向rtsp通道写入视频数据,等待客户端连接
5.6 get_para()接口说明
该接口实现的功能是配置文件读写,主要是雷达参数配置。
5.7自定义网络通信工作线程TCP_work_thread()
该线程主要实现pc端与设备端命令交互,雷达数据发送,GPS数据发送。其中,所有需要发送给pc端的数据全部是在各个工作模块数据解析完成后再发送给PC端,本线程主要处理PC机发送设备控制命令。
六、移动智能终端软件功能设计
基于 Android 平台的监控客户端的总体框架如图所示,分别由网络通讯模块、视频解码模块以及视频显示模块等构成。其中网络通讯模块接收来自服务器的所有数据,对数据进行解析,并将视频数据存入到视频缓冲区。视频解码模块负责从视频缓冲区中读取数据并送入 H. 264 解码器进行解码。最后,采用 OpenGL 图形库将解码后图像绘制到屏幕上实现视频播放。
视频数据的接收和解码都是复杂、持续的过程,如果其中一个过程出现阻塞会影响整个程序的运行,因此,客户端使用多线程实现数据接收和视频解码的并行处理。在整个程序运行过程中,主线程响应用户操作,负责屏幕刷新工作,并创建两个子线程:数据接收和视频解码子线程,处理过程如图5所示。
七、结束语
该软件设计方法已完成了设计和调试,并基本实现了在某型调车辅助系统上的应用,满足了特路市场的应用需求,并且该软件设计方法也可以推广应用于其他相关行业,实现通过视频雷达监控并传输数据从而代替传统的视频监控,可大大提高视频采集的可靠性和准确性。
参考文献
[1]周俊杰基于单目视觉的夜间车辆和车距检测南京:南京理工大学,2009
[2]郭磊,李克强,王建强,等一种基于特征的车辆检测方法汽车工程,2006
[3]崔振华基于视觉和激光雷达的夜间前方车辆探测算法研究长春:吉林大学,2007
[4]郭磊,刘志峰,王建强,等. 雷达与机器视觉的空间同步方法. 清华大学学报(自然科学版),2006,46(11):1904-1907.
[5] National Transportation Safety Board: Special Investigation Report[R]. 2001.
[6] GiancarloAlessandretti, Alberto Broggi, PietroCerri. Vehicle andGuard Rail Detection Using Radar and Vision Data Fusion[ J].IEEE Transactions On Intelligent Transportation Systems,2007,8(1):95-105.
范毅,19790620,男,陕西咸阳,汉;大学本科;工程师;计算机应用
- 新时代“智慧党建”视角下高校党员经常性教育的机制探讨
- 分歧、试探与博弈:中美建交第一阶段的谈判
- 我亲历的两个航运业发展历史性时刻
- “红色引擎”引领商圈市场转型升级
- 立德树人视角下民办学校党建工作创新探析
- 组织力视阈下高校院系党组织提升治理效能的调研与思考
- 刍议完善在职党员居住地发挥作用的长效机制
- 制度破题党建引领社会治理创新
- 论传承和弘扬虹口党史及红色文化资源蕴含的价值基因
- “流动”的革命性:论20世纪以来社会变迁中的“游民”阶层及其研究
- 从抗疫斗争看党建引领社会治理创新
- 从上海走向世界:关于1960—1970年代 “赤脚医生”经验推广的历史考察
- 公共空间对三线建设的非生产性贡献
- 强化党建引领,筑牢防控长城
- 党支部量化考核在公立医院基层党组织建设中的探索
- 试论以党的领导推进高校“双一流”建设
- 品牌“植入”党建:探索非公企业“双强”发展新路径
- 新时代党建引领社区治理的三重逻辑
- 宋庆龄与中苏友好协会(1949—1966)
- 从党史汲取力量 为人民健康引水
- 强党建 抓管理 促农业农村工作高质量发展
- 以党建工作项目化提升国有企业基层党组织建设工作的研究
- 打造新媒体思政教育干部队伍提升高校党建和思政教育工作成效
- 基于个案学院学生党员主体意识培养的若干思考
- 浅析新形势下基层公立医院的党建工作
- re-addition
- readdition
- readditions
- re-address
- readdressed
- re-addressed
- readdresses
- re-addresses
- readdressing
- readdrest
- readds
- readeption
- reader
- readers
- readership
- readerships
- readied
- readier
- readies
- readiest
- readily
- readiness
- readinesses
- reading
- readings'
- 对眼前的事物发生浓厚兴趣而注意力高度集中
- 对眼色
- 对着
- 对着先生就讲书,对着屠夫便讲猪
- 对着剑发誓
- 对着吹
- 对着吹吧
- 对着和尚骂贼秃
- 对着城门打哈欠——一气呵城
- 对着墙壁流眼泪——独自悲伤
- 对着大家
- 对着大雪喝寒风
- 对着天立誓、发咒
- 对着头
- 对着实物或风景绘画
- 对着干
- 对着张飞骂刘备——找气惹
- 对着月亮攀谈——说空话
- 对着某事物
- 对着桑树骂槐树
- 对着棺材许愿
- 对着棺材许愿——哄死人
- 对着灵牌说谎话(纸糊的棺材)——哄死人
- 对着王八批乌龟——正对号
- 对着目标扔