林明宝+余春艳

摘要:惯性导航技术的飞跃发展及相关传感器在精度方面的提高,使得无人飞行器特别是四轴飞行器获得快速的发展。国内以深圳大疆创新科技有限公司为代表的无人机逐渐进入寻常百姓家,使得无人机的运用范围不再仅仅局限于军事领域。本文将对一种自主巡航的四轴飞行器控制系统的设计和实现过程做出详细的说明。该系统以PID算法为核心,利用无线传输技术,将地面站点指定的飞行路线传送给四轴飞行器,利用GPS实现飞行器的自主巡航。
关键词:自主巡航;四轴飞行器;PID;控制系统
中图分类号:TP391 文献标识码:A 文章编号:1009-3044(2016)16-0227-04
1概述
四轴飞行器隶属于多轴飞行器,由于其结构相对简单,飞行时稳定性易于控制,方便悬停,动作灵活等优点,而成为飞行器爱好者争相研究的对象。由于其体积小,但能产生较大升力,使得其能在较小的空间里执行人为需要的任务,而不易被发现,因此越来越多地被运用到民用和军事等领域,比如,战地情报搜索、震后地势拍摄等。
2 飞行原理及基本飞行状态
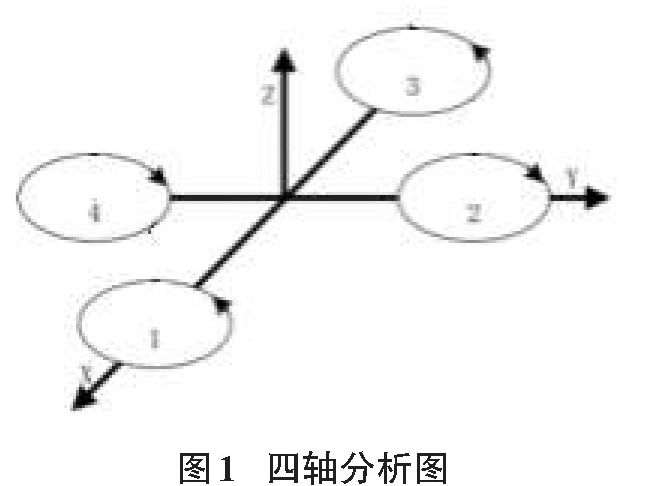
在飞行空间中,飞行器可分别在x轴、y轴、z轴三个方向做平移和旋转运动,因此,共计有6个自由度。通过控制四个电机的转速,可实现在这6个自由度上的运动。基本运动状态有6种,分别是:垂直运动、俯仰运动、滚转运动、偏航运动、前后运动、侧向运动。如图1所示,旋翼1、3逆时针旋转,2、4顺时针旋转。本文中,设计旋翼3为四轴头方向。
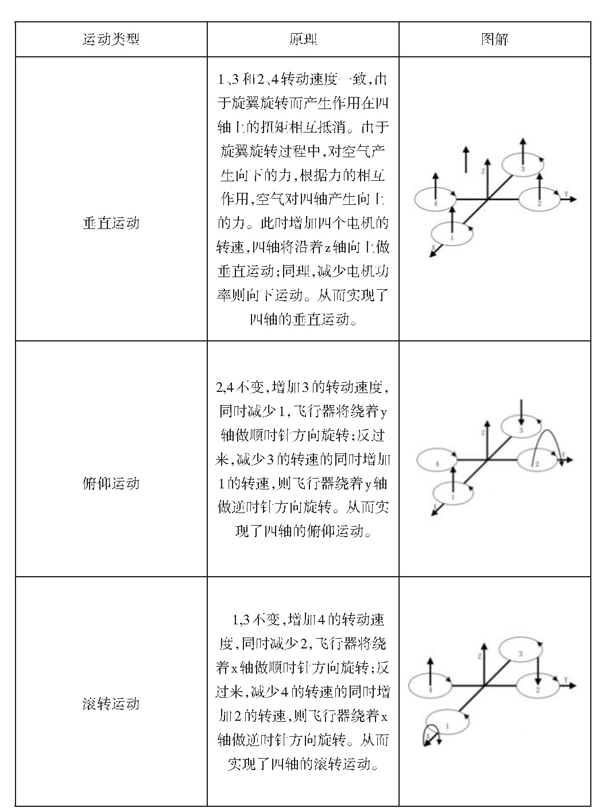
下表阐述了四轴的6种基本运动类型及其对应的原理解析与图解。
3 控制系统的实现
3.1 硬件控制系统
要实现四轴的稳定飞行,需要有专门设计好的硬件控制系统,实现四轴的姿态矫正,才能完成预期的飞行效果。图2是硬件控制系统的设计原理图。
本系统单片机采用STM32F103C8T6微控制处理芯片,控制板上焊接有MPU6050六轴运动处理组件来获取飞机在飞行过程中的姿态信息,无线传输技术将安卓APP指定的飞行路线传给控制系统,在GPS导航下完成指定路线的飞行。图3是本系统设计好的主控板正反面。
3.2 飞行器姿态解算
四轴坐标系由地理坐标系(E-xyz)和机身坐标系(B-xyz)组成,地理坐标系确立四轴的地理位置,机身坐标系确立四轴的姿态。四轴飞行姿态有三个:翻滚角(roll)、俯仰角(pitch)、偏航角(yaw)确立,分别记为:
姿态解算是指将四轴的线性加速度和角加速度根据一定的计算方式,得到四轴的实时姿态信息。本文采用四元数算法,得到飞行器姿态数据。Mpu6050内嵌入了DMP四元数解算功能,可免去微控制器的计算处理时间。图4位惯性导航原理图。
四轴焊接有mpu6050,具有三轴加速度计和三轴陀螺仪的功能,加速度计获取相对于地面坐标系的三轴加速度,陀螺仪获取相对于机身坐标系的三轴转速。在姿态解算中,加速度的作用是对根据陀螺仪积分得到的三个姿态角进行修正,修正的快慢由PID算法中的kp和ki两个参数进行控制。如图5,为四元数操作流程图。
3.3 飞行器控制算法的实现
3.3.1 PID控制器的实现
PID,为比例、积分、微分的对应英文首字母的简写,是现在应用的最为广泛的工业控制器,最初是模拟PID,通过硬件实现,现在出现了对积分和微分进行离散化处理后的数字PID。本文对数字PID进行详细说明。
3.3.1 四轴姿态调整的实现
通过mpu6050获取加速度和角速度,经过四元数解算后,我们便得到了四轴的姿态信息,通过四轴内嵌的GPS模块,同时也得到了四轴所处的地理位置信息。在此基础上,四轴需要能够以稳定的姿态在所指定的地理路线上飞行,我们引入PID控制系统,以满足我们的飞行需求。
飞行器姿态的更动,归根结底,是更改了四个电机的占空比,使得有不同占空比的电机转速不同。故经过PID处理后的输出将调控各个电机的转速,来使得四轴接近预期的姿态。这里简单阐明PID如何实现对翻滚角的控制,如图7所示。
经四元数处理得到的翻滚角和期望值的偏差经过pid控制系统处理后,可控制着四个电机不同的占空比(pwm)的输入,电机的转速与占空比的大小成正比,因此翻滚角也由此发生变化。同理,将翻滚角改成俯仰角、偏航角、飞行位置,同样可通过控制电机来改变姿态和飞行路线。
4 总结
本文说明了所设计的自主巡航的四轴飞行器控制系统的实现,在硬件系统已经实现的条件下,本文侧重于软件算法的设计与实现。在无人飞行器快速发展的今天,消费者对无人机功能的要求也必然更加苛刻,本文所设计的四轴飞行器,实现了在稳定飞行前提下,能够按指定的路线图进行自主巡航,对四轴飞行器的进一步研究具有一定的意义,也对四轴的发展做出了一定的贡献。
参考文献:
[1] 陈振兴.基于STM32的微型四轴飞行器研究与设计[D]. 天津:河北工业大学,2013.
[2] 唐懋. 基于Arduino兼容的Stm32单片机的四旋翼飞行器设计[D]. 厦门:厦门大学,2014.
[3] 吴大勇.基于LM4F120的四旋翼飞行控制器的研究[D]. 太原:太原理工大学,2014.
[4] 汪俊.基于惯性传感单元的动作捕捉系统研究与设计[D]. 合肥:中国科学技术大学,2015.
[5] 帅英梅. 涡轮增压柴油机电控调速系统的模型与仿真[D]. 武汉:华中科技大学,2004.
- 延续性护理在宫颈癌全子宫切除术患者中的应用效果分析
- 针药结合与单纯药物治疗抑郁症的临床疗效比较研究
- 三黄痤疮散外敷与火针疗法治疗湿热蕴结型痤疮的疗效比较
- 穴位埋线结合实按灸治疗腰椎间盘突出症的临床疗效观察
- 中西医联合治疗异位妊娠的临床效果探讨
- 中西医结合治疗肾虚血瘀型复发性流产的临床研究
- 柴苓汤加减辨证治疗中老年女性慢性尿路感染的临床观察
- 观察加味六君子汤治疗迁延性肺炎的临床疗效
- 海淀区城乡结合部2016~2019年学生流感疫苗预防接种情况调查分析
- 阿立哌唑与利培酮对门诊精神分裂症患者社会功能的影响分析
- 小剂量抗精神病药联合心理疗法治疗躯体化障碍的疗效观察
- 观察左乙拉西坦在癫痫病治疗中的应用效果
- 西地碘含片联合透明质酸钠凝胶辅助治疗中、重度慢性牙周炎的临床疗效观察
- 玻璃酸钠治疗白内障术后干眼的疗效探讨
- 利拉鲁肽注射液联合二甲双胍片治疗糖尿病的临床效果分析
- 抗生素骨水泥治疗创伤性胫骨骨髓炎的临床疗效
- 烯丙雌醇片联合保胎灵胶囊治疗先兆流产60例的疗效观察
- 分析欣母沛配合B-Lynch缝合术用于宫缩乏力性产后出血的价值
- 欣普贝生用于晚期足月妊娠引产的临床观察
- 观察复方谷氨酰胺治疗活动期轻中度溃疡性结肠炎的效果
- 云南白药治疗上消化道出血患者的疗效分析
- 莫沙必利联合兰索拉唑治疗反流性食管炎的效果观察
- 三维适形放疗联合紫杉醇、顺铂同步化疗应用于老年中晚期食管癌患者治疗中效果分析
- 血糖水平对氟喹诺酮类药物治疗老年肺结核合并糖尿病患者临床疗效的影响
- 纳洛酮联合无创正压通气对慢性阻塞性肺疾病合并呼吸衰竭患者的临床疗效分析
- reimaged
- reimages
- re-images
- reimagine
- reimagined
- reimagines
- reimaging
- re-imaging
- reimagining
- reimbibe
- reimbursability
- reimbursable
- reimburse
- reimbursed
- reimbursement
- reimbursements
- reimburser
- reimbursers
- reimburses
- reimbursing
- reimmerge
- reimmerse
- reimmersed
- reimmerses
- reimmersing
- 下属官吏
- 下属对长官的昵称
- 下属的贿赠
- 下属随员
- 下山
- 下山客
- 下山容易,上山难;上得山来,景更宽
- 下山担柴——薪挂两头
- 下山逢故夫
- 下岗
- 下岗人员等待得到工作岗位
- 下岗干部
- 下工
- 下工夫
- 下差
- 下巴
- 下巴上挂铃铛——响(想)到哪里,就说到哪里
- 下巴壳子
- 下巴底下垫砖——有口难张
- 下巴底下就是路
- 下巴底下支块砖——张不开口
- 下巴底下支小锅——炒(吵)嘴哩
- 下巴底下支砖块——张不开口
- 下巴弯曲
- 下巴短削