曾凡菊
摘要:该文是对双足竞步机器人的控制系统电路进行设计,具体内容是以ATmega16单片机作为主控芯片完成舵机控制总体结构、复位电路、晶振电路、电源电路和通信电路的设计。
关键词:双足竞步机器人;单片机;舵机控制;PXVM信号
1概述
双足竞步机器人是有两条腿的机器人,整个机器人只有下半身,以两条腿达成步行。本文是根据已经设计好的双足竞步机器人的机械结构来完成控制系统设计,考虑到机器人需使用舵机来驱动,舵机需要由PWM信号来进行控制,所以控制系统的设计需要一个可以输出PWM信号的控制元件来进行。结合单片机的控制优势,本文ATmega16单片机对舵机控制。
2舵机
伺服电机,一般称为舵机。控制舵机需要使用PWM信号,PWM信号是频宽调制信号的简称,有多种方法可以获得PWM信号。只要能产生标准的控制信号的数字设备都可以用来控制舵机。例如:PLC、单片机等。
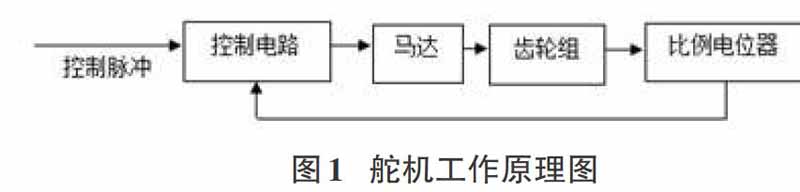
舵机主要由舵盘、齿轮减速组、位置反馈电位计、直流电机、控制电路板等几个部分组成。舵机是一个闭环系统,在舵机的控制电路接收到控制信号后会通过位置反馈电位计的反馈信号对比舵机输出轴的位置,以此来判断电机的转动方向和速度。电机转动后,电机的转动会通过齿轮减速组减速后传递到舵盘,同时位置反馈电位计还会进行检测反馈保证转动位置的准确,如果有偏差电机还会通过转动进行调整。所以采用舵机驱动,可以利用舵机本身的闭环特性,而不需要另外的设计反馈电路,而且舵机非常适合接收单片机的控制信号。因为舵机有着结构紧凑、安装简单、输出力矩大、准确性高、便于控制等优点,现在已经广泛应用于机器人领域。
舵机原理图如图1所示。
3ATmega16单片机
ATmega16主要性能有:
(1)先進的RISC结构的8位AVR微处理器;
(2)2个具有独立预分频器和比较器功能的8位定时器/计数器;
(3)可编程的串行USART接口;
(4)工作电压4.5~5.5伏。
(5)32个可编程的I/0口;
(6)速度等级:0-16MHz;
4控制系统电路设计
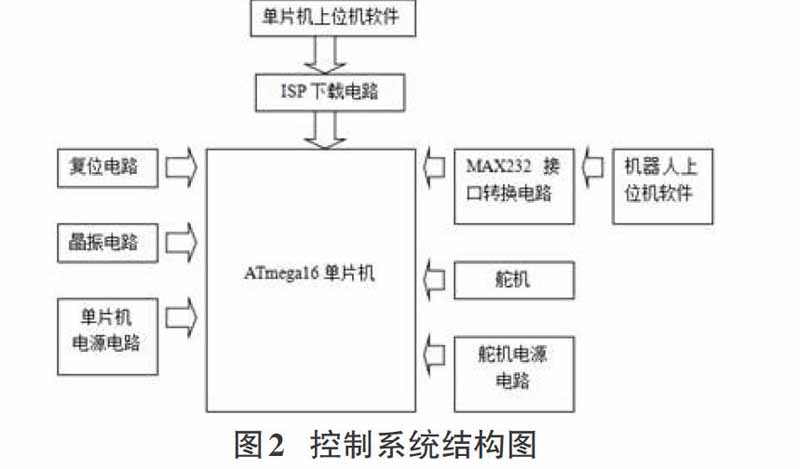
本设计结合AVR系列高档8位单片机的优势和特点设计出一款使用串口作为机器人与上位机接口的24路机器人舵机控制器。其总体结构图如图2所示。
各部分电路设计如下:
4.1复位电路
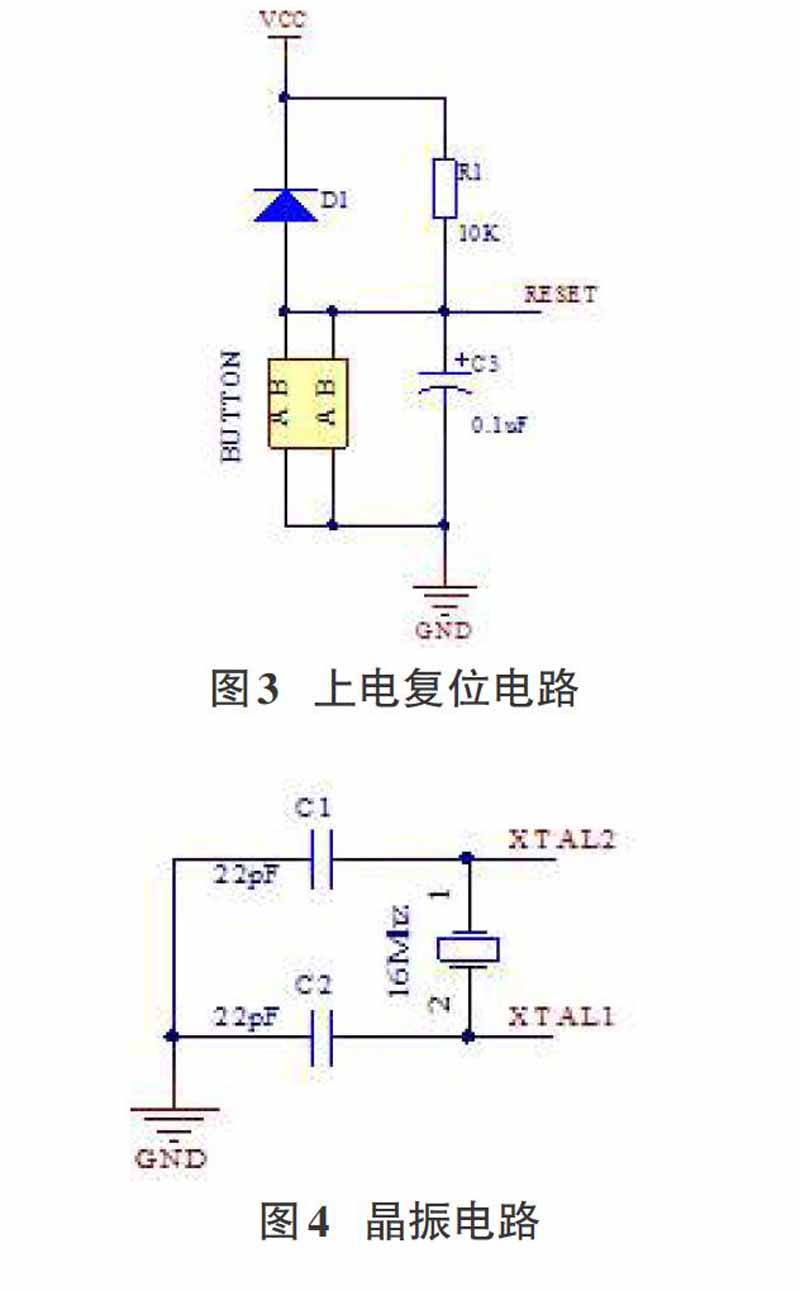
该设计选用上电复位。ATmega16单片机有内置的上电复位功能。因此,只需要复位引脚与电源之间放置一个10K的电阻。为了整体运行的可靠性需要加装一个0.1uF的电容C3,用于消除干扰。如图3所示。其中,D1(1N4148)的作用为:
(1)将复位输入的最高电压钳在Vcc+0.5V左右。
(2)系统断电时,电阻R1(10K)短路,使c3快速放电,这样在下一次通电时,可以保证正常复位。在AVR工作时,按下开关会使复位引脚变为低电平,使单片机复位。
4.2晶振电路
该设计是上位机通过串口将数据发送给单片机,以达到控制舵机的目的。其通信波特率要求较高。选用16Mhz外部石英晶体振荡器。一般晶振两端均需要接典型值为20-30pF的电容。且两电容值总是相等的。晶振电路如图4所示。
4.3电源
ATmega16单片机的工作电压为4.5~5.5V,该设计采用7805集成稳压电源输出端5伏供电,如图5所示。其中,D2是用来防止外接电源极性接反后造成器件损坏的。D9为反向泻流保护二极管,以保护7805集成稳压芯片。一般都应该加上该保护。发光二极管用来指示电路已正确上电。电容C7、C8及C9、C10起整流滤波的作用,提高电路的抗干扰能力。7805输出标准电压为5伏,输出电压范围为4.8~5.2伏,输入电压范围为7~35伏,输出静态电流为5.3毫安。
因为舵机在运行过程中会使用很大的电流,若电流被舵机吸纳了会对单片机的运行产生影响,为了避免上述情况,舵机和单片机采用2个电源进行供电,2个电源共用一个地线。舵机电源如图6。
4.4串口通信电路
本设计是由上位机控制单片机输出独PWM波的。此设计中的上位机为计算机。计算机的RS232C标准规定的逻辑电平与单片机的TTL电平不兼容,因此在电脑和单片机链接传输数据的时候需要进行转换,这就需要在电脑和单片机之间加上一个RS232电气转换接口来保证数据传输的可行性。电路图如图7所示。
4.5下载电路
ISP下载接口不需要外接其它零件,因此各引脚都可以正常使用,不受ISP的干扰。如图8所示。
5总结
本文是对双足竞步机器人的控制系统进行了设计,通过对多种控制元件的比较,选择了ATemge16单片机来控制舵机的动作,并对控制系统各部分进行设计,绘制出电气原理图。
- 实施全面预算管理 促进医院管理水平的提升
- 分析财务共享服务中心员工激励策略
- 加强县乡财政供养人员管理研究
- 试论公立医院国有资产管理的问题及对策
- 营改增政策背景下的企业税务筹划
- 营改增对企业会计核算及税收的影响研究
- 营改增对公立医院财务管理的影响分析及应对措施
- 事业单位会计与内部控制建设的关系分析
- 内部控制视角下高校收费票据管理探析
- 高校内控制度建设研究
- 作业成本法在第三方检测企业的应用探讨
- 破产清算会计若干问题再思考
- 国有企业成本的精细化管理要点分析
- 作业成本管理中的问题及应对策略
- 试论会计管理体制的创新及其现实选择
- 关于管理会计与财务会计之间关系研究
- 浅议会计委派制的缺陷及完善对策
- SAP的应用对会计基础工作的影响
- 论农村会计现状及建议
- 高速公路建设项目竣工后相关会计事项核算浅析
- 新医改背景下公立医院的全成本核算及成本控制问题研究
- 提高预算编制准确性路径初探
- 浅析提升民办高校财务会计管理能力的途径
- 基于信息化环境下企业会计监督优化
- 新会计制度的实施对事业单位财会工作影响
- desertedness
- desertednesses
- deserter
- deserters
- desertification
- desertifications
- desertified
- desertifies
- desertify
- desertifying
- deserting
- desertion
- desert island
- desertization
- desertizations
- desertlike
- desertness
- deserts
- desert's
- desert²
- desert¹
- deserve
- deserve/be owed
- deserved
- deservedly
- 陈蕃榻
- 陈蕃礼贤
- 陈蕃解榻
- 陈虑
- 陈衍
- 陈衡恪
- 陈表
- 陈表破械
- 陈西滢
- 陈见
- 陈规
- 陈规陋习
- 陈规,俗套
- 陈言
- 陈言务去
- 陈言老套
- 陈言肤词
- 陈言腐语
- 陈让
- 陈训
- 陈论
- 陈设
- 陈设仪仗
- 陈设供展览的物品
- 陈设器物