林渭平 陈檀 许远城
摘要:锅炉过热蒸汽温度控制系统具有大惯性、时变性、纯延迟等特点,因此常规的PID控制器不能实现理想的控制效果。设计模糊PID控制器是在整定出PID初始参数的基础上,把现场操作人员的PID整定经验总结为模糊规则,根据控制系统的实际响应情况,使用模糊推理对PID参数进行在线调整。此外,采用粒子群算法对模糊自整定PID控制系统的参数进行优化,大大提高了系统的快速性、稳定性、跟踪性能和抗扰动能力。
关键词:过热汽温;模糊控制;模糊PID控制;粒子群优化算法;自寻优;模糊自适应PID控制
中图分类号:TP18? ? ? ?文献标识码:A? ? ? 文章编号:1009-3044(2018)35-0232-04
Abstract:The superheated steam temperature control system of boiler has the characteristics of large inertia, pure delay, time-varying and difficult to control, and the conventional PID controller cant achieve the desired control effect. The fuzzy PID controller designed in this paper is Based on setting the initial parameters of PID. The fuzzy rule model is summed up by setting up the PID parameter setting experience of the operator Ac-cording to the actual response of the control system, the PID parameters are adjusted online by using fuzzy inference and decision making. In addition, the particle swarm optimization algorithm is used to optimize the parameters of the fuzzy self-tuning PID control system, which greatly improves the stability, rapidity, dis-turbance rejection ability, tracking performance and delay suppression ability of the system.
Key words:superheated steam temperature; fuzzy control; fuzzy adaptive PID control; particle swarm optimization algorithm; self optimization; fuzzy adaptive PID control
火力发电厂中对于过热蒸汽温度控制极其重要,需要使过热器出口温度稳定在设备允许的范围内。过高的过热蒸汽温度会影响过热器以及相关管道,严重的话将引起超温从而影响安全运行;过热蒸汽温度过低,将会造成火力发电厂热耗增加,降低热效率。所以有效准确地控制策略是十分必要的[1]。
未来优化过热蒸汽温度控制需要用到智能控制技术。智能控制技术不需要完全地了解系统的知识,也不需要建立数学模型,而是通过在自身控制过程中不断更新,并且对于控制过程中的各种干扰具有很好的适应能力。模糊控制作为一个智能控制领域的重要研究方向,它把模糊数学作为理论基础,将计算机理论和自动控制原理相互结合,能够有效提高工业生产过程中的自动化水平,提升控制的效果[2]。本文的控制对象为过热蒸汽温度,传统PID控制此类大惯性大迟延系统有许多不同之处,因此本文将传统的PID控制理论与模糊数学理论相结合提出了模糊自适应PID控制系统,然后采用了粒子群算法对模糊自整定PID控制系统的参数进行参数优化,结果表明该系统能够可以有效地改善过热蒸汽温度的动静态特性。
1 模糊PID控制理论
模糊控制((Fuzzy Control)以模糊数学作为理论基础,將自动控制原理和计算机控制作为技术支撑。模糊数学主要包括模糊集合论、模糊语言知识表达及模糊规则推理等[3-5]。
1.1 模糊控制基本原理
模糊控制算法首先需要将清晰的规则向模糊方向转换。通过将采样得到的过程值与设定值作差,得到误差E,作为模糊控制器的输入值。输入的误差E经过模糊化处理后,通过模糊控制规则R进行计算。可得到误差E的模糊矢量e。模糊控制中,模糊控制量u为模糊矢量e和模糊控制规则R的乘积,公式为:
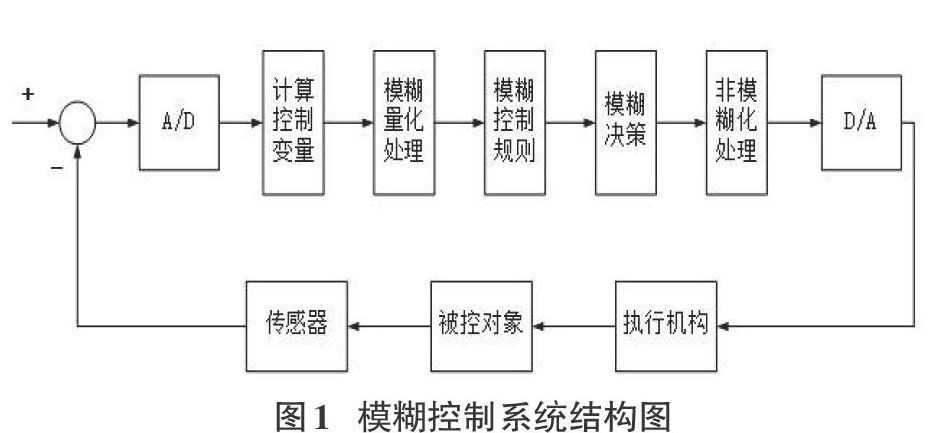
模糊控制系统的整体结构如图1所示,传感器采集被控对象的数值后与参考值进行作差得到的值,然后经过A/D转换器进入模糊控制推理部分,依次经过模糊量化,模糊控制规则推理,模糊决策计算模糊量后,最终通过非模糊化处理得到数字控制量。如此闭环控制,从而实现整个模糊控制。
1.2 模糊控制器的基本结构
模糊控制一般由模糊控制器,输入/输出接口装置,广义对象,传感器四个部分组成。相比于传统的控制系统,模糊控制系统就是将传统控制器用模糊控制其代替。因此,模糊控制器(Fuzzy Controller,FC)是模糊控制系统中最重要的部分[6-8]。模糊推理控制器是一类语言性的算法控制器,其基于建立的语言规则进行控制,之后输出相应控制量。以下将具体介绍模糊控制器的几个部分。
1.2.1 输入接口
输入接口的主要是模糊化。模糊化主要指的是将清晰将输入的清晰值通過适当变化成为模糊子集和隶属函数过程。模糊化是不可缺少的,因为为了在之后的计算中使这些清晰值与语言表达构建的推理规则相适配,就需要转换为模糊量,即模糊子集。对于模糊子集个数,个数较多时可以提高控制精度,但是个数较多时,模糊规则的数目会相应地更快速地增长,从而使运算量大量增加,一般根据计算机的算力和算法的复杂程度来选择模糊子集的数目,模糊子集数量越大,控制精度更高,同时,也会伴随着对计算机算力需求的提升和程序的计算时间增加。
1.2.2 知识库
知识库一般由数据库和规则库组成。数据库中存放了用于输入输出计算的隶属函数集。能够在致使推理的过程中向推理机提供数据支持,一般把数字量转换成为模糊量。规则库提供一系列在推理机推理时的控制规则,存放了在近似推理时的一些条件选择语句和近似推理时的一些算法。
1.2.3 模糊推理与清晰化
根据输入的模糊量,按照知识库中的模糊推理规则,以语言推理的形式进行模糊推理从而解得关系,此过程为模糊推理。模糊推理得到的仍为模糊集合,因隶属度函数的计算,往往是不规则多段集合的输出。清晰化,即解模糊接口需要将这些多段的,不规则的模糊集合映射成一个代表性的数值,最终输出一个确切的输出作为控制器的输出。
1.3 模糊自适应PID控制器设计方案
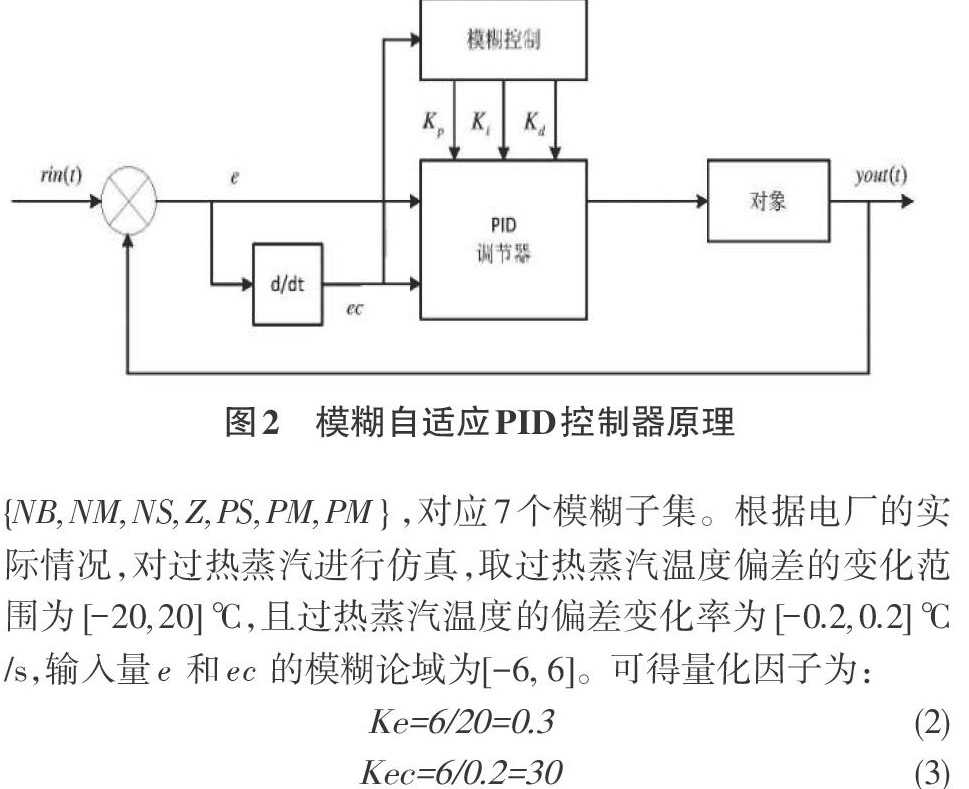
本文被控对象为过热蒸汽温度,采用的控制器选用两输入三输出的方案,模糊控制器以偏差[e]及其导数[ec]为控制输入,输出为PID控制器的三个参数,并且直接更新PID控制器。针对不同的被控对象偏差和偏差导数,模糊控制器会给PID控制器输入不同的比例、积分、微分参数,能够针对不同过程,模糊PID控制器能够自适应地找到PID的最佳控制参数,从而具有更好的稳定性和动态特性。图2为模糊自适应PID控制器原理图。
1.3.1 确定隶属度函数及相关参数
将输入量[e]和[ec]、输出量[Kp,Ki,Kd]进行模糊化处理。输入变量和输出变量均采用了三个等级对称划分,分类为[{NB,NM,NS,Z,PS,PM,PM}],对应7个模糊子集。根据电厂的实际情况,对过热蒸汽进行仿真,取过热蒸汽温度偏差的变化范围为[[-20,20]]℃,且过热蒸汽温度的偏差变化率为[[-0.2,0.2]]℃ /s,输入量[e]和[ec]的模糊论域为[-6, 6]。可得量化因子为:
设置模糊控制器输出变量Kp、Ki、Kd的基本论域为[-1, 1],模糊论域为[-3, 3],则比例因子Kp、Ki、Kd都是1/3。
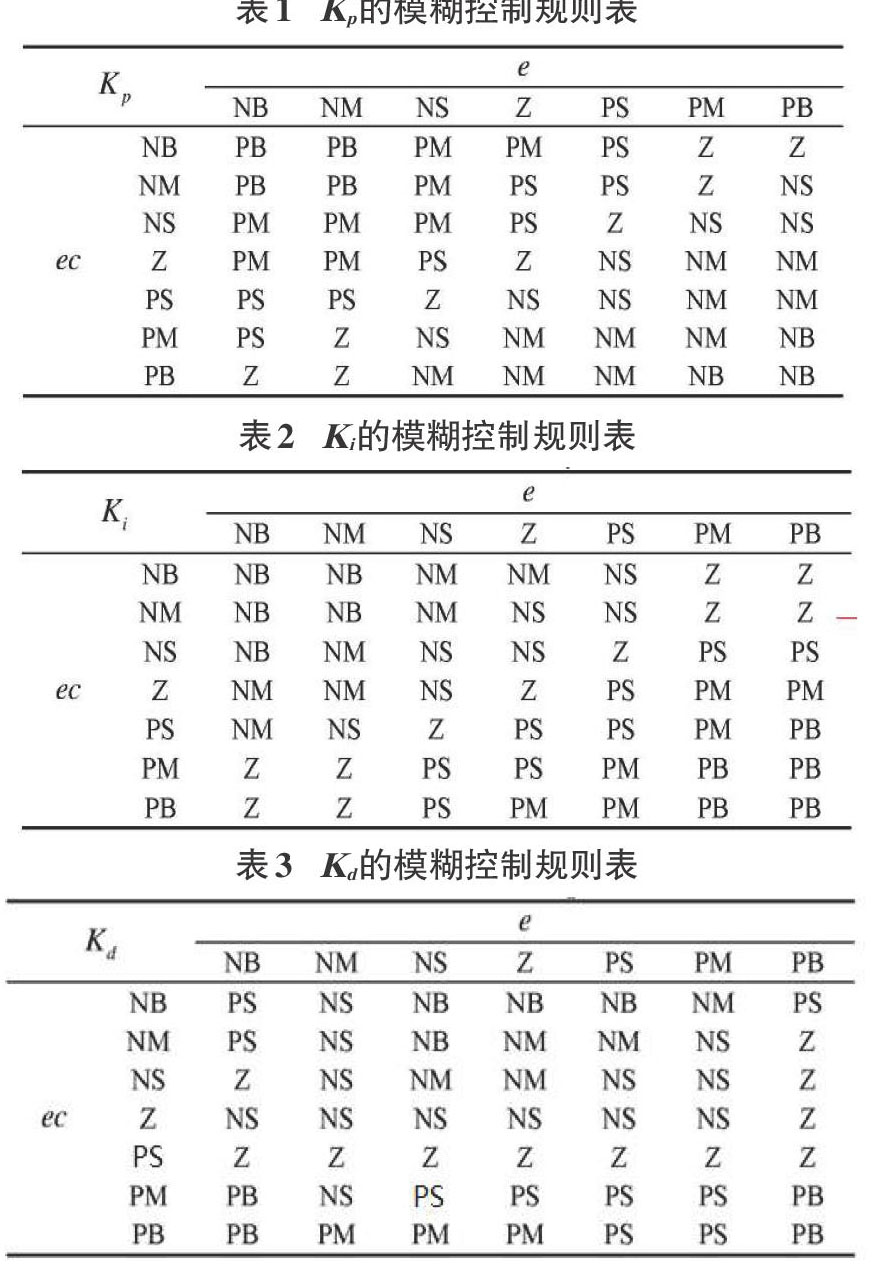
1.3.2 建立模糊控制规则表
因为输入输出均被分为了7个模糊子集,因此模糊规则表中三个控制器输出参数Kp、Ki、Kd都包含有49条模糊规则,每条规则的语言描述实例为:
在FIS编辑器的view菜单下找到Edit Rule的子菜单,进入规则编辑器,按照以上规则进行编辑,
得到Kp、Ki、Kd的三围规则图:
1.4 过热蒸汽温度控制的Simulink模拟
simulink软件中,在锅炉蒸汽温度控制系统的输入值为阶跃信号,在T=600s时,加入d=0.2的阶跃扰动信号,两种控制方法的输出特性曲线如下图所示:
输出特性曲线维规则图
由仿真图可知,紫色所表示的常规串级PID控制器和黑色所表示的模糊自适应串级PID控制器都能讲过热蒸汽温度控制在正常范围内。但是,就控制效果来说,面对过热蒸汽这样的大惯性大迟延时变系统,模糊自适应串级PID控制器的超调量小且调节时间短。同时当T=600s加入扰动环节后,模糊自整定PID控制能更快地达到稳定状态,因此模糊PID控制系统相比于传统PID系统具有更好的稳定性和抗扰动能力。
2 基于粒子群优化的模糊PID控制系统
2.1 粒子群算法的原理
粒子群算法是一种群体智能进化算法,根据个体适应值的大小去寻找种群最优解。然而,它与其他群体智能算法相比,没有使用进化算子,而是把每个隐含的问题都看成是若干个位于n维搜索空间中没有体积和重量的微粒,称作“粒子”。它能够根据自身或者其他粒子的适应度值来调节自己飞行的速度和位置,最终得到参数的最优值。
用Xi=(xil,xi2,… ,xiN)和Vi=(vil,vi2,…,viN)来表示在N维空间中第i个粒子的飞行时间和飞行速度;矢量Xbesti=(xil,xi2,…,xiN)是微粒i飞过的最优位置,被称为个体最优位置。就最小化问题来说,只有当目标函数值Q(Xi)越小时,它所对应的适应值才越好,那么粒子i当前的最优位置可以用公式(4)和(5)确定。
如果要用Xbestg=( xgl, xg2, . . .,xgN)来表示种群整体中所有粒子经历过的最佳位置,则全局最优解为Qbestg。
1) 粒子更新自己的速度:
为了使粒子群算法能够收敛,并且能够防止局限于局部最优值,需要设置合适的速度变化,速度更新范围区间为[-Vmax,Vmax]。
2) 进行向量更新:
向量更新不超过粒子的取值范围[Xin(min) ,Xin(max) ],这样不断更新直到达到要求,取得极值。
其中:c1为局部系数,c2为全局系数,他们代表了向自身极值和全局极值的靠近的速度,它们的取值一般为c1=c2=2;其中r1和r2是0~1之间的随机变量。
2.2 基本粒子群算法的流程
基本PSO流程:
1) 初始化,包括定义初始种群,进化代数,还有算法中用到的常量。
2) 评价种群,计算初始种群各粒子适应度。
3) 求取当前的Xbesti和Xbestg。
4) 进行速度和位置更新。
5) 评价种群,计算新的粒子适应度。
6) 比较Xbesti和Xbestg,更优替代。
7) 判断结束条件,满足则跳出循环,不满足则跳到4)。
2.3 控制系统参数的自适应算法简介
模糊控制器中的输入参数e、ec和输出参数Kp、Ki、Kd都会对模糊自整定PID控制器的控制效果产生影响,因此随着不确定因素的增多,只靠经验来调节输入和输出参数偶然性较强,难以获得最優参数,过渡过程动态特性无法达到良好的水平。因此在此处可以根据粒子群算法来优化控制性能指标,基于粒子群模糊自整定PID控制器参数寻优的目标函数所选择的性能指标为ITAE指标,即时间与绝对误差乘积的积分指标。
利用粒子群算法寻优模型,可与过热蒸汽温度自适应模糊PID控制器结合,构建出基于群体智能的优化控制算法。在模型中加入ITAE指标部分,输出函数将作为粒子群算法的适应度函数,以此来优化粒子群的参数。首先调用函数assignin将x(1), x(2), x(3), x(4), x(5)的值赋值给Workspace中的ke,kec,kp,ki、kd,该语句实现了将工作区中的粒子群算法计算得到的参数值赋给Simulink部分中的模型配置参数。
最终得到的控制器参数最优参数值为:
Ke=2.213,Kec=26.4316
Kp=1.1437,Ki=0.5638,Kd=0.3114
最优性能指标:J = 945.2143
3 总结
本文设计了模糊自适应PID控制器,并将此算法成功应用到过热汽温的控制中,把此种控制方式与传统的PID控制方式进行仿真比较控制效果。模糊自适应PID控制器系统结合模糊数学理论相比于常规PID控制,能够准确设置出PID的最佳参数,发挥PID优良的控制效果,同时基于偏差的PID控制器也具有较好的鲁棒性,和稳、准、快的控制特性,使控制系统具有良好的动态与静态性能指标。此外,本文仿真基于matlab与simulink仿真平台,并且对于模糊自整定PID控制系统的参数的确定,使用了粒子群算法进行优化,最终得到了输入输出的最优参数值。总体而言,基于PSO算法的模糊自适应串级PID控制器,对系统调节快速响应、稳定控制性能、抗干扰能力和跟踪负荷响应的能力上都具有很好的效果,对于系统模型变化,参数存在摄动的情况,也具有良好的控制效果,控制器具有良好的鲁棒性,应用前景广泛,十分具有价值。
参考文献:
[1] 侯建新. 外高桥1000MW超超临界机组过热蒸汽温度控制的设计与研究.上海交通大学,2009.9:11-12.
[2] 谷国林等.智能控制的特点及其在电力工业中的应用[J].河北电力技术,2000:24-35.
[3] 薛志斌等.先进控制策略在电厂热工过程控制中的应用[J].青海电力,2000:35-47.
[4] 王亚妓.基于遗传模糊规则的智能控制系统的展望[J].山西科技,2005:33-45.
[5] Zadeh L.A, Fuzzy Set[J]. Information and control, 1965:12-24.
[6] Mamdani E.H, Applications? of Fuzzy? Algorithms? for? Control? of? Simple Dynamic Plant[S]. Proc IEEE, 1974:6-8.
[7] 钟学飞.基于蚁群算法模糊控制的火电厂主汽温控制系统的研[D].华北电力大学,2009:65-74.
[8] 牛培峰.模糊神经网络在锅炉过热汽温控制中的应用研究[D].燕山大学,2010: 6-8.
[9] 李庆芝,牛玉广,卢博伦,兰志超.火电厂过热汽温控制系统性能评价[J],电力科学与工程,2011, 27(7):45-46.
[10] 刘禾,白焰,李新利.火电厂热工自动控制技术及应用[M].北京:中国电力出版社,2008:23-46.
[11] 董文波.基于神经网络的锅炉蒸汽温度控制系统[D].哈尔滨理工大学,2014:10-21.
[12] 刘金馄.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2008:132-176.
[13] Yubazaki N , Ashida T, Hirota K. Dynamic? fuzzy? control? method? and? its? application of inducation motor. IEEE International Conference on Fuzzy Systems , 1995, 3:286-292.
[14] Alexandru. M, Popescu. D. Neuro-fuzzy diagnosis in final control elements of AC motors[J]. Proceedings? of? the? American? Control? Conference,? Proceedings? of? the? 2004 American? Control Conference (AAC), 2004, Vol.4:3759-3763
[15] Sun Wei-wei, Wu Yu-qiang. A class of fuzzy sliding-mode control simulation for? multi-link robot manipulators [J]. Journal of System Simulation, 2005, 17(6):1449-1452.
[16] 刘志远径向基函数神经网络及在电厂热工过程建模和控制中的应用研究[D].南京:东南大学,2003:66-87.
Liu Zhiyuan radial basis function neural network and its application in modeling and control of thermal process in power plant [D]. Nanjing: Southeast University, 2003:66-87.
[17] Hopfield.J.J., Artificial neural networks, IEEE Circuit? and? Devices? Mag., Sept:3-10,1998.
[18] Z.J.SHEN, Z.G.YANG. Dynamic Characteristic and Control System Adjusting of? Main? Steam? Temperature? in? 325MW? Peak? Regulating? Power? Unit[J]. Proceedings of the Chinese Society of Electrical Engineering, 1991, 11(1):55-62.
[19] R.YUSOF, S.OLNATU, M.I HALID. Self-tuning PID Control: A Multivariable Derivation and APPlieation[J]. Automatiea, 1994, 30: 1975-1981. )
[20] 李建強,杨铎烔基于灰色预估 PID 控制的过热汽温控制[J]. 华北电力大学学报, 2011, 38(1):71-74.
[21] Q.M.CHENG, Y.H.WANG. The Study on Fuzzy-PID Composite Serial Control System? with? Smith? Predictive? Estimate? for? Main? Steam? Temperature? in Thermal? Power? Plant[J].? Proceedings of the World Congress on Intelligent Control and Automation. 2006: 7636-7640.
[22] CLERC M. The? swarm? and? queen:? towards? a? deterministic and adaptive particle swarm? optimization[C]. In: Proceedings of the IEEE Congress on Evolutionary Computation, 1999: 1951-1957.
[23] CORNE D, DORIGO M, GLOVER F. New Ideas in Optimization [M]. New York: Mc Graw Hill, 1999: 379-387.
[通联编辑:梁书]
- 大数据在专业统计工作中的应用现状探究
- 镇江市配送绩效评价的研究
- 基于儒家文化的客户关系管理分析
- 论“互联网+”时代中的农业经济发展研究
- 顶端优势演化路径探究
- 我国营商环境规制建设的反思与创新探究
- 从“财”“政”“法”三维度治理地方政府债务
- 大数据时代企业财务管理的创新策略
- 基于全球价值链视角企业国际化创新路径分析
- 新商科背景下应用型本科院校创新创业能力提升措施
- “电子商务进农村示范县”服务站点建设问题与对策研究
- 博物馆衍生品开发现状及对策研究
- 校企合作模式下高职就业指导体系创新的研究
- 新职业生涯时代职业核心能力初探
- 中国茶道思想在高校创新教育管理人才培养模式的运用
- 新常态下企业绩效和薪酬管理存在的问题及对策
- 基于全面预算管理的企业内控体系构建
- 空间正义视域下新型城镇化建设的路径研究
- “一带一路”倡议与国内企业的应对策略
- “一带一路”倡议下我国南海海洋战略的思路与探讨
- 企业提高技术创新能力问题研究
- 创业投资企业的财务风险管理现状及对策研究
- 关于省(市)管国有企业对其再投资企业加强董监事履职能力建设及三会管理的思考
- 商业火箭运营全面预算管理研究
- 远程医疗服务质量的提升研究
- self-dissociated
- self-dissolved
- self-division
- self-divisions
- self-doctrine
- self-doctrines
- self-dominion
- self-dominions
- self-donation
- self-donations
- self-doomed
- self-doubt
- self doubt
- self-doubts
- self-drawing
- self-drawings
- self-duplicating
- self-ease
- self-eases
- self-easing
- selfed
- self-educating
- self-educations
- self-effacement
- self-effacements
- 向世人夸耀以博取赞誉
- 向世人显示
- 向东
- 向东之宫
- 向东征伐
- 向东流
- 向东而祭
- 向两旁或四周围看来看去
- 向两边摇动
- 向个人或社会申述,请求他人帮助或主持公道
- 向中
- 向主人辞别
- 向主管部门陈述工作情况
- 向义急公
- 向亲向不了理
- 向人乞求饭食钱物等
- 向人借
- 向人借贷
- 向人借钱
- 向人借钱物
- 向人募化斋饭
- 向人口底下讨憨水
- 向人夸耀
- 向人征询意见
- 向人征询意见时用的敬辞