摘 要: 提出了一种高效的基于压缩感知的实时目标追踪算法,该算法将空域数据转换到小波域,然后利用变密度采样矩阵对小波域数据进行压缩,从而极大地降低了数据量。在稀疏重建上,将St?OMP算法代替OMP算法以提高稀疏重建的速度。在多种具有挑战性的视频序列上进行实验,结果表明该算法提高了追踪准确度和速度。
关键词: 压缩感知; 实时目标追踪; 贪婪算法; 稀疏重建
中图分类号: TN911.7?34 文献标识码: A 文章编号: 1004?373X(2015)03?0057?02
Real?time object tracking algorithm based on compressive sensing
ZHAO Zhen?zhen
(Department of Electronics, Ocean University of China, Qingdao 266100, China)
Abstract: An efficient object tracking algorithm based on compressive sensing is proposed to improve the implementation speed and efficiency of [?1]tracker and the OMP tracker. It transforms the spatial data to the wavelet domain, and compresses wavelet signal by means of variable density sampling matrix to reduce the data size greatly. Besides, OMP algorithm is replaced by St?OMP algorithm to improve the speed of sparse reconstruction in the process of sparse reconstruction. Experiments in several challenging video sequences show that the proposed algorithm achieves better tracking result both in accuracy and speed.
Keywords: compressive sensing; real?time object tracking; greedy algorithm; sparse reconstruction
0 引 言
基于压缩感知的实时目标追踪算法是建立在粒子滤波框架上的一种新颖的算法[1],能巧妙解决目标遮挡、外观变化等噪声干扰,得到快速准确的追踪效果。
2009年Xue Mei 等人首次提出了将压缩感知融合到粒子滤波框架的[?1]tracker 算法[2],利用了凸松弛算法进行稀疏重建,但该算法较高的计算复杂度导致实时性差。2011年Hanxi Li等人提出了OMP tracker算法,其追踪速度为[?1]tracker的几百倍[3]。尽管如此,OMP tracker的追踪速度平均也只有10 f/s,追踪速度亟待提高。
1 [?1]tracker与OMP tracker
基于压缩感知的实时目标追踪算法是一种基于模板的算法[4],目前具有代表性的算法有[?1]tracker和OMP tracker两种,其核心思想是求解候选目标[si]在模板空间除了降低数据维度,改进压缩感知重建算法的执行效率也是提高目标追踪速度的一个重要方法。本文采用了在OMP算法上发展出来的St?OMP算法,与OMP算法最大的区别在于每一步匹配追踪时选择多个最佳原子,而不是单个最佳原子,由此减少匹配次数,加速了算法[10]。
3 实现框架
为验证本文所提算法的性能,为该算法设计一个实现框架如图1所示。初始化阶段,追踪目标周围随机均匀生成[nT=10]个尺寸为12×15(像素)的目标模板,并将其投影到小波域进行数据压缩,频域采样率设定为30.5%。在采样阶段,根据前一时刻确定的追踪目标位置均匀生成当前时刻采样数为[ns=600]的候选目标,并投影到小波域。
图1 基于压缩感知的实时目标追踪算法的实现框架
4 实验结果及分析
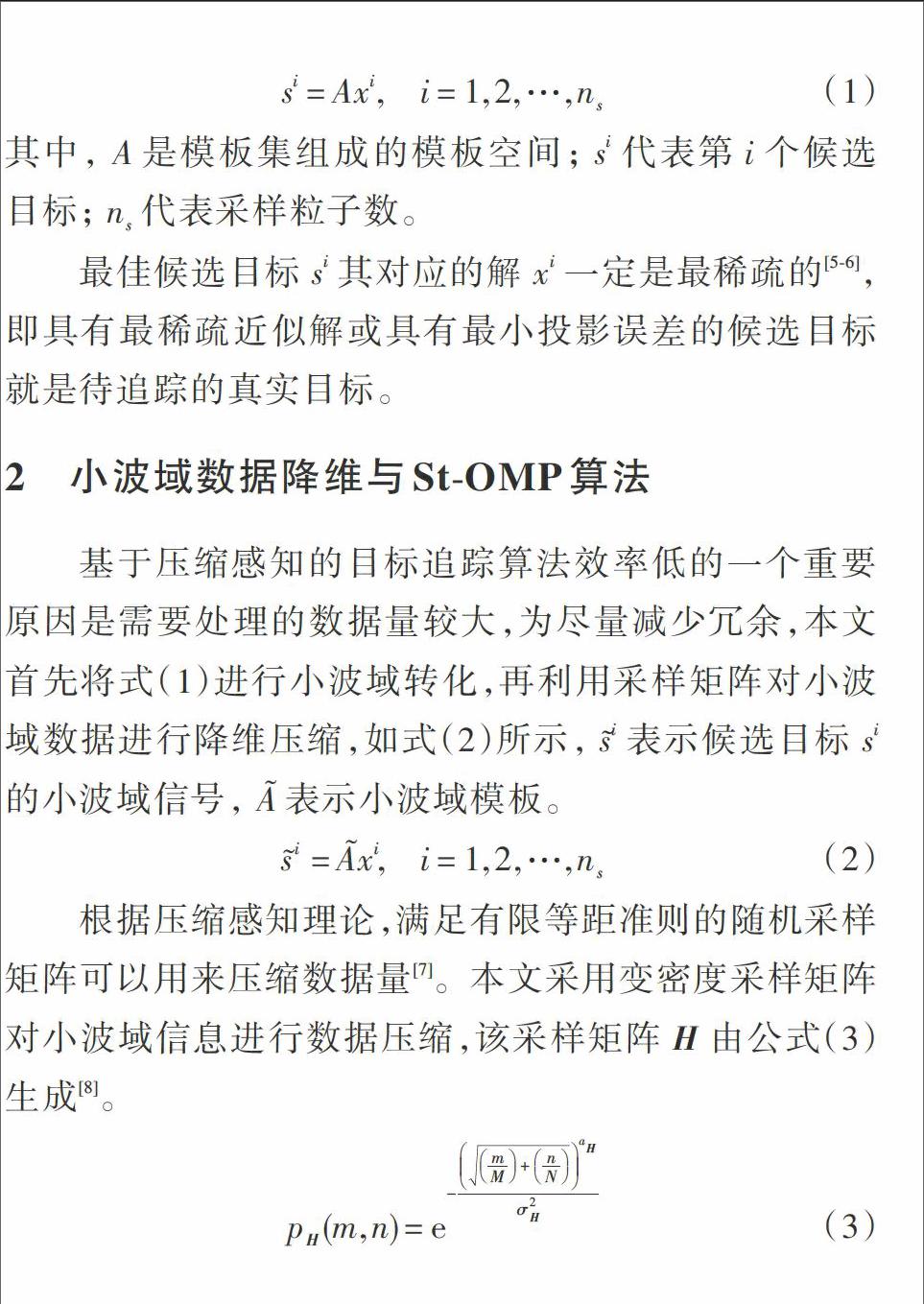
通过5段视频序列来测试该算法的性能,如图2所示,每一帧追踪到的目标用红色平行四边形框出。视频“Car4”中的追踪目标是汽车,从图2(a)排中可以看出,在光照条件变化时,该追踪算法的追踪效果良好。视频是“Singer1”的追踪目标是穿白衣服的女歌手,如图2(b)排所示,视频中光照发生了剧烈的变化、目标尺度也改变了,追踪效果依然良好。“Occlusion1”和“Occlusion2”追踪的目标是人脸,如图2(c),(d)所示,当人脸被严重遮挡时,追踪结果良好。“Deer”追踪的目标是运动迅速的一头鹿的头部,如图2(e)所示,在第54,56帧时追踪目标周围存在跟目标几乎一模一样的鹿,追踪结果并没有受第二头鹿的影响而出现失误。
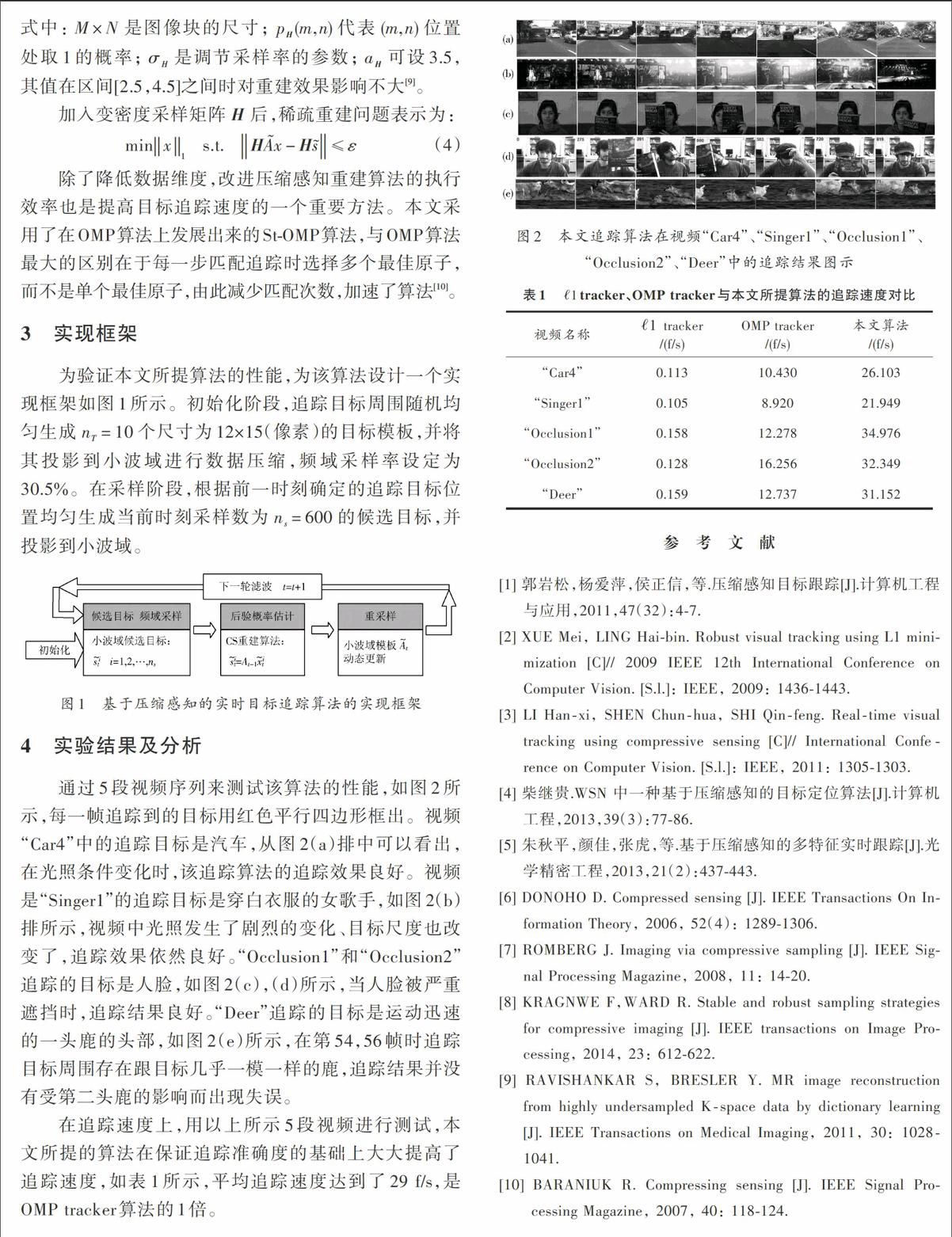
在追踪速度上,用以上所示5段视频进行测试,本文所提的算法在保证追踪准确度的基础上大大提高了追踪速度,如表1所示,平均追踪速度达到了29 f/s,是OMP tracker算法的1倍。
参考文献
[1] 郭岩松,杨爱萍,侯正信,等.压缩感知目标跟踪[J].计算机工程与应用,2011,47(32):4?7.
[2] XUE Mei, LING Hai?bin. Robust visual tracking using L1 minimization [C]// 2009 IEEE 12th International Conference on Computer Vision. [S.l.]: IEEE, 2009: 1436?1443.
[3] LI Han?xi, SHEN Chun?hua, SHI Qin?feng. Real?time visual tracking using compressive sensing [C]// International Confe?rence on Computer Vision. [S.l.]: IEEE, 2011: 1305?1303.
[4] 柴继贵.WSN 中一种基于压缩感知的目标定位算法[J].计算机工程,2013,39(3):77?86.
[5] 朱秋平,颜佳,张虎,等.基于压缩感知的多特征实时跟踪[J].光学精密工程,2013,21(2):437?443.
[6] DONOHO D. Compressed sensing [J]. IEEE Transactions On Information Theory, 2006, 52(4): 1289?1306.
[7] ROMBERG J. Imaging via compressive sampling [J]. IEEE Signal Processing Magazine, 2008, 11: 14?20.
[8] KRAGNWE F,WARD R. Stable and robust sampling strategies for compressive imaging [J]. IEEE transactions on Image Processing, 2014, 23: 612?622.
[9] RAVISHANKAR S, BRESLER Y. MR image reconstruction from highly undersampled K?space data by dictionary learning [J]. IEEE Transactions on Medical Imaging, 2011, 30: 1028?1041.
[10] BARANIUK R. Compressing sensing [J]. IEEE Signal Processing Magazine, 2007, 40: 118?124.
- 以学生为主体的启发式材料力学实验课程改革
- 数据结构课程第一堂课设计
- 材料类专业工程力学课程互动型教学方法探讨
- CDIO教学模式在光电信息科学与工程专业实验教学中的运用
- 全面整合三维CAD技术的工程图学国际化教学改革实践
- 中俄机械方向学士培养方案比较研究
- 研讨课对不同专业学生的指导作用探析
- 协同创新环境下的研究生校企联合培养模式研究
- 大数据背景下我国大学课程与教学改革趋势分析
- 建构主义理论下的大学英语口语测评探究
- 高校应用型人才禀赋结构与培养模式探索
- 项目与任务驱动教学法在工科教学中的应用
- 学校发展本质分析与实践路径的构建
- 浅析利用陕西红色资源实施高校思想政治教育的策略
- 民办高校思政课实践教学中的问题和对策
- 外语院校思政课自主学习教学新模式的探索与实践
- 当代大学生思想政治教育现状的调查与分析
- 试论高校世界古代史课程中的史料引入
- 专门用途英语教学多模态框架建构与实证研究
- 关于大学公共英语分级教学的利弊及其改进对策分析
- 探究在俄语教学中提高学生学习效果的策略
- “互联网+”背景下油气储运专业外语教学改革的思考
- 工程本科给排水专业英语教学改革探讨
- 东南亚国家与广西少数民族预科外语教学的比较
- 谈《宠儿》中保罗·D的男性成长历程
- attractablenesses
- attract/attraction
- attracted
- attractedto
- attracters
- attracting
- attractingly
- attraction
- attractionally
- attractions
- attractive
- attractively
- attractiveness
- attractiveness, attractivity
- attractivenesses
- attractors
- attracts
- attributable
- attributableprofit
- attribute
- attributed
- attributer, attributor
- attributers
- attributer's
- attributes
- 精心勘测设计
- 精心地筹算
- 精心培养造就人才
- 精心孤诣
- 精心打扮自己
- 精心打磨
- 精心抚养
- 精心挑选
- 精心探求
- 精心整治
- 精心料理
- 精心构思
- 精心深诣
- 精心照管幼儿,使好好成长
- 精心琢磨,反复玩味
- 精心的构思
- 精心研习
- 精心研究
- 精心研究计算
- 精心研究,冷静思考
- 精心研究,尽力思考
- 精心研究,深入思考
- 精心筹划和构思
- 精心细致地雕刻
- 精心编造、罗织罪名陷人于罪