
摘 要: 介绍了在地下空间中具有较强穿透力和高精度定位能力的UWB定位技术,采用基于UWB技术的DWM1000定位模块设计了一种地下停车场车辆定位系统,介绍了定位系统的组成和测距定位工作原理,着重进行了基于正多边形的锚节点优化布局,并在实际地下停车场中进行车辆定位性能测试,验证了定位系统的可行性。
关键词: 地下停车场; 车辆定位系统; UWB; DWM1000模块; 锚节点; 标签节点
中图分类号: TN914?34; TP273 文献标识码: A 文章编号: 1004?373X(2017)09?0136?05
Abstract: The UWB positioning technology with strong penetration power and accurate positioning capability in underground space is introduced. The DWM1000 positioning module based on UWB technology is used to design a vehicle positioning system applied to the underground parking. The composition of the positioning system and working principle of the range?finding and positioning are introduced. The optimized layout based on regular polygon for the anchor nodes was carried out emphatically. The vehicle positioning performance was tested in an actual underground parking to verify the feasibility of the vehicle positioning system.
Keywords: underground parking; vehicle positioning system; UWB; DWM1000 module; anchor node; tag node
0 引 言
随着城市经济飞速发展,机动车辆保有量迅速增加,地面停车资源越来越有限,很多新建高层建筑都建立了配套的地下停车场。但由于人们对地下停车场复杂多样的布局和停车位标志不熟悉、引导不到位等原因,使得在迷宫似的地下停车场停车难和找车难,成为驾驶者苦恼的新问题。
地面停车场一般都有成熟的停车定位导航系统,大都是结合卫星导航(GPS)实现车辆定位进而实现停车导航[1]。GPS系统是专门为实现无线导航定位功能而组建的具有特定结构的定位系统[2?3],对于信号到达较为容易的室外开阔环境,GPS可以提供米级精度的定位信息,广泛应用于地上停车场的车辆停车定位导航系统中[4?5]。由于建筑物本身及其内部结构和设备等的影响,使得在室内和地下环境中很难接收到GPS信号,无法提供定位所需的有效信息[3]。当前大多数的地下停车场依然采用传统的字母和数字编码,导致在迷宫式的地下停车场里快速找到空置停车位和离开时迅速找车,还是有一定难度的。如何有效精确地对车辆进行定位,是地下停车场定位导航系统要考虑的首要问题。
UWB(超宽带)定位是近年来发展起来的一种定位方式,一般使用的是极窄的脉冲信号或者极宽的频谱带宽信号进行信息的传递,与其他定位技术相比,主要优点是穿透能力强、定位精度高,具有厘米级的定位能力[6?8]。UWB可以在封闭的室内或者障碍物较多的情况下完成测距定位任务,即使在地下空间中性能也能得到较好的发挥[9?10]。
本文设计了一种地下停车场车辆定位系统,在地下停车场中合理配置基于UWB定位技术的锚节点,车辆进入停车场后,会获得一张具有UWB定位标签节点的出入卡,实现车辆位置实时定位。如果配合相应的导航系统进行路线规划,既可准确找到空置停车位,离开时也可准确找到车辆停放位置,驾车后又可准确找到出口,并按规划导航路线离开,有效避免迂回“巡泊”的尴尬场面,有效解决了地下停车场停车难和找车难的問题。
1 系统整体设计
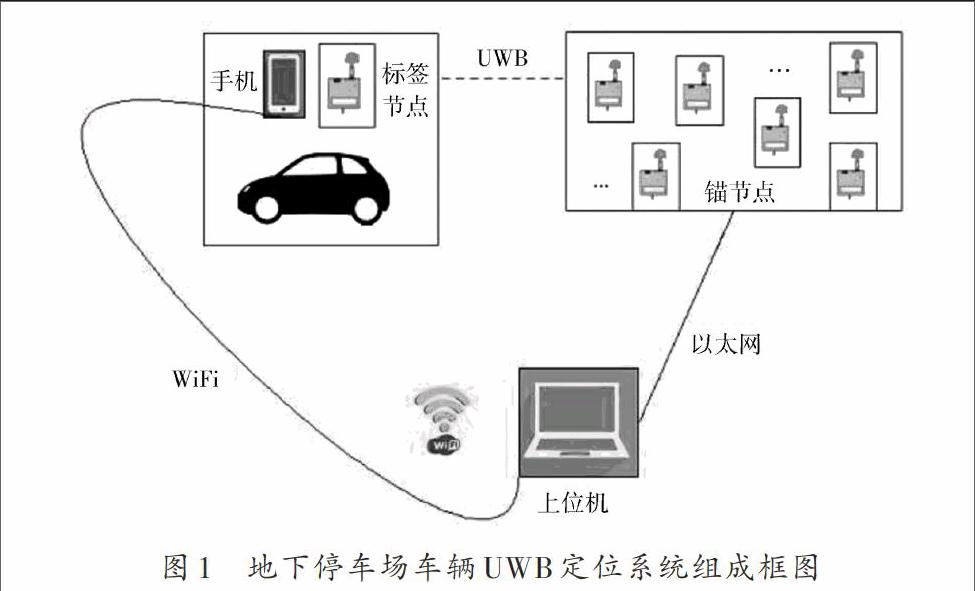
地下停车场车辆UWB定位系统组成框图如图1所示。包括至少三个以上的UWB定位模块作为锚节点、一个移动的标签节点、驾驶者手机、上位机和WiFi网络。
地下停车场UWB定位导航系统可以划分成两部分:一部分是定位功能;一部分是导航功能。定位功能是导航功能的前提。定位系统的功能主要包括:车辆进入地下停车场入口处时,领取一张安装有标签节点的出入卡,连接停车场的WiFi,手机扫描带有标签节点信息的二维码,同时上传标签节点ID信息到上位机;最近的三个锚节点测量与驾驶者标签节点的距离并发送给上位机;上位机软件根据公式可以计算出标签节点在地下停车场空间内的坐标,上位机在电子地图中定位标签节点的位置,从而实现对地下停车场车辆的实时定位,进而可实现车辆路径规划和导航功能。
2 UWB车辆定位系统设计与实现
地下停车场超宽带定位系统的核心就是测距定位。本系统选用DecaWave公司推出的具有实时测距定位功能的无线传输模块DWM1000,采用IEEE 802.15.4?2011协议,基于到达时间差的TDOA双向测距定位方法。一对DWM1000模块最大理论测距为300 m,定位精度为10 cm,抗多径和抗干扰能力强,计算复杂度低,成本低,易于实现[11]。DWM1000厘米级的定位精度可充分满足在封闭的地下停车场空间中对车辆准确定位的需求。
2.1 测距定位方法
定位是在测距的基础上进行的。在一个给定的参照系中,标签节点测得它与锚节点之间的相对距离,锚节点也可以测得相互之间的相对距离,标签节点任选部分锚节点组成一个参考系统,根据这些距离按照几何计算方法确定自己在参考系中的位置,就叫定位[12]。定位的常用方法有基于到达时间(TOA)、基于到达时间差(TDOA)、基于到达角度(AOA)和基于接收到的信号强度的指示(RSSI)等四种[13]。这四种方法各有优缺点,其中TDOA利用时间差的信息推导计算出锚节点与标签节点之间的距离,既具有很高的定位精度,又符合超宽带系统时间分辨率较高的特性,系统的复杂度小,成本低[14?15]。综合比较,选择TDOA定位作为UWB超宽带测距定位的方法。
基于TDOA方法的DWM1000双向测距定位原理如图2所示。
一对DWM1000模块,其中,一个作为锚节点,一个作为标签节点,双向测距过程如下:
(1) 锚节点向标签节点发送广播信息,并标记开始传输起始时刻为
(2) 标签节点接收到广播信息并向锚节点发送一个回应的广播信息,特定的响应延迟时间为(这是由标签节点响应的时间确定的);
(3) 锚节点接收到回应信息,标记接收时的返回时刻为
2.2 UWB定位模块通信接口
DWM1000模块是一个低功耗、采用CMOS大规模集成电路工艺的单芯片UWB无线收发模块,数据通信采用slave?only模式的SPI接口。模块内部组成以及与单片机的接线如图3所示[17]。
DW1000芯片内部集成了收发器、模式变换器、电源管理模块、状态控制器以及SPI接口电路。DW1000芯片与外接天线和电源模块构成DWM1000模块。在DWM1000模块和单片机构成的系统中,单片机是SPI通信主机,提供串行时钟CLK信号;DWM1000模块被动接收CLK信号,在主机CLK信号作用下完成两者数据交换。CS是片选信号,用于多SPI从通信设备之间的选择。MOSI是数据输入信号线,用于传输接收到的数据信号。MISO是数据输出信号线,用于传输需要发送的数据信号。POL是时钟极性控制端子,用以确定SPI总线空闲电平高低状态。PHA是时钟相位控制端子,用以确定在同步时钟信号的第一还是第二个跳变沿进行数据采样。单片机STM32F107通过SPI总线对DW1000模块传输初始化、配置和测距数据,然后把收到的实时位置数据通过以太网发送到上位机进行定位计算处理。采用SPI通信接口的锚节点和标签节点的开发电路板如图4所示。
2.3 UWB锚节点几何优化布局
以某建筑地下停车场为案例,总建筑面积为94.4 m×37.2 m,停车位为103个,整体布局如图5所示。
标签节点主要随着驾驶者车辆沿着出入口和行车道移动,锚节点的布局要覆盖到每一个标签节点可能移动到的位置,以确保实时定位标签节点的位置。锚节点配置的数量和布局直接影响到定位的精度,锚节点配置得越好,定位精度越高。采用几何优化算法进行锚节点的布局,几何优化算法就是对各个锚节点进行规则的布置,可以布置成正三角形、正方形、正五边形、正六边形等多种形状[18]。在二维平面上,最优的锚节点配置的几何结构是所有锚节点构成一个正多边形,每个锚节点位于正多边形的顶点位置[19],如图6所示。
在二维平面上,每三个锚节点就可以定位一个标签节点,故优先选定一个适宜的位置布置1#锚节点,然后选取锚节点之间成60°几何角度的位置作为2#、3#锚节点,组成规则的正三角形,锚节点布局如图7所示。
DWM1000模块在理想条件下的理论定位距离是300 m,当布置在复杂的地下停车场环境中,因为障碍物如墙、梁柱、设备等会使信号强度有一定衰减,根据资料,确保定位精度的定位距离最保守按理论值的计算[16],可设定一对锚节点——标签节点定位最大距离为30 m。标签节点只要在图7所示的边长为30 m的正三角形范围内运动,定位精度都可以保持在10 cm以内。据此可以求得正三角形的面积
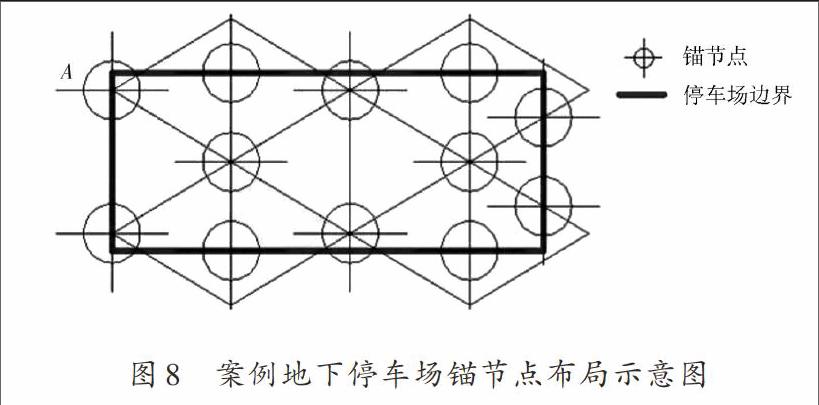
可求出案例停车场以案例地下停车场左下角的边界点作为坐标原点建立直角坐标系,坐标为坐标轴单位为mm。标签节点是随着驾驶者的车辆移动的,设其坐标为1#锚节点的位置有多种方案可以选择,根据案例停车场的情况,将1#锚节点选取在图8中的处。按照几何优化法将面积为的地下停车场空间划分成多个正三角形,最终划分的正三角型个数锚节点布置数量如图8所示。
3 系统功能测试
系统功能测试在图5所示的案例停车场内进行,按照图8劃分正三角形,放置锚节点12个,携带一个标签节点的移动车辆,测试环境如图9所示。
首先进行了一对DWM1000 标签节点与锚节点定位模块的测距性能测试,分别测试携带标签节点的车辆行驶至不同距离时锚节点测得的距离和激光测距仪测得的距离,对比结果见表1,现场测试见图10。验证了在30 m以内该UWB定位模块测距误差在10 cm之内,满足测距要求;测距超出30 m时,定位误差增大,定位性能变差。
以携带有标签节点的驾驶车辆由行车道驶入停车位过程为例,进行定位性能测试。车辆以5 km/h的速度行进,每隔2 m采集一次定位数据,绘制出UWB测距定位轨迹和车辆实际行驶轨迹对比如图11所示。由于车辆在地下停车场内限速一般在5 km/h以内,降低行车速度后进行定位性能测试,与5 km/h行驶速度下测得的定位精度无明显变化。
再模拟车辆在案例地下停车场各种不同的可能行驶轨迹进行定位性能测试。由于车辆行驶轨迹始终落在由最近的三个锚节点组成的正三角形内部,定位误差变化很小,定位绝对误差始终保持在10 cm以内,可满足对车辆准确定位的要求。
4 结 语
本文介绍了基于UWB定位技术的DWM1000定位模块的特点,通过对锚节点进行优化布局,实现了对携带标签节点的地下停车场车辆的实时定位,并在实际停车场中进行了车辆定位测试,验证了系统的可行性。地下停车场车辆定位系统如果配合相应的导航系统,规划路线,将为驾驶者停车和取车提供便利。导航系统的构建将是下一步工作的重点。
参考文献
[1] 王丽欣.基于GPS/GSM的车辆定位跟踪系统设计与实现[D].沈阳:沈阳工业大学,2013.
[2] 胡天琨.基于Android的室内导航定位系统设计与实现[D].上海:东华大学,2012.
[3] 何颖.基于WLAN室内定位系统的AP快速部署算法研究[D].哈尔滨:哈尔滨工业大学,2011.
[4] 舒洪灵.基于GPS技术的车辆监控系统的设计和实现[D].成都:电子科技大学,2013.
[5] 曹永升,梁胜祥,谢冠恒,等.移动定位技术的现状与发展趋势[J].电子技术应用,2015,41(1):17?20.
[6] 葛利嘉.超宽带无线通信[M].北京:国防工业出版社,2005.
[7] 边江南.UWB室内定位算法的研究[D].南昌:南昌航空大学,2013.
[8] 安宝强,张浩,崔学荣.单基站UWB定位距离的获得及处理方法[J].现代电子技术,2014,37(7):15?17.
[9] 邹洪良.基于改进TDOA的超宽带室内定位技术研究[D].哈尔滨:哈尔滨工业大学,2012.
[10] 韩笑楠.基于IR?UWB和ZigBee的TDOA定位方案[D].长春:吉林大学,2013.
[11] DecaWave. Dw1000?product?brief [EB/OL]. (2014?01?14). [2016?02?18]. http://www.decawave.com/sites/default/files/product.
[12] 邹杰,李珊君,陈晓明.一种改进的室内无线定位算法[J].计算机工程,2011(14):76?78.
[13] 陈方晓.基于异步TOA估计的超宽带室内定位系统的研究与实现[D].哈尔滨:哈尔滨工业大学,2012.
[14] 张忠娟.基于UWB的室内定位技术研究[D].天津:天津大学,2011.
[15] 李伟杰.基于UWB 信号室内定位系统性能优化研究[D].哈尔滨:哈尔滨工业大学,2013.
[16] YAVARI M, NICKERSON B G. Ultra wideband wireless positioning systems [R]. New Brunswick: Faculty of Computer Science University of New Brunswick, 2014.
[17] DecaWave. Sensor DWM1000 module [EB/OL]. (2014?10?16). [2016?02?18]. http://www.decawave.com/support.
[18] 白敏.基于TDOA的陸基多点定位系统设计与定位算法研究[D].重庆:重庆大学,2010.
[19] 赵仕俊,张朝晖.无线传感器网络正六边形节点覆盖模型研究[J].计算机工程,2010,36(20):113?115.
- 非流动性折扣的度量与行业差异分析
- 大数据时代基于财务共享服务模式的IT审计
- 山西省审计学会第五届会员代表大会暨五届一次理事(扩大)会召开
- 中国教育审计学会2015—2016年度科研课题研究成果汇报会召开
- 新时期审计文化的弘扬与建构学术研讨会召开
- 第六届审计理论创新发展论坛(2016)召开
- 2016年山西财经大学会计学院学术论坛召开
- 湖南省财务学会2016年会暨学术研讨会召开
- “互联网+代理记账”会议召开
- 中国税收教育研究会2016年年会暨第十届学术研讨会召开
- 2016年中国—东盟财税合作论坛召开
- 会计稳健性和权益资本成本研究
- 雇员揭发上市公司会计舞弊的激励机制研究
- 汽车整车行业上市公司财务杠杆效应实证分析
- 我国民营企业内部资本市场有效性实证研究
- 非处方药上市公司研发支出会计信息披露研究
- 基于大数据的企业社会责任信息披露平台设计
- 我国上市银行社会责任信息披露状况研究
- “互联网+”对企业财务信息披露的影响分析
- 事件研究法下财务披露管理有效性的实证分析
- 基于虚拟云桌面构建高校财务网络的探讨
- 高校非财务指标对财务指标的影响研究
- 高校财务治理对会计信息披露质量的影响研究
- 非财务计量绩效信息审计基本理论框架
- 第二十一届中国财务学年会召开
- nonsubsidies
- nonsubsiding
- non-subsidized
- nonsubsidized
- non-subsidy
- nonsubsidy
- nonsubsistence
- non-subsistence
- nonsubsistences
- nonsubstantial
- non-substantial
- nonsubstantialities
- nonsubstantiality
- nonsubstantially
- nonsubstantialness
- nonsubstantialnesses
- nonsubstantiation
- nonsubstantiations
- nonsubstituted
- nonsubstitution
- non-substitution
- nonsubstitutional
- nonsubstitutionally
- nonsubstitutionary
- nonsubstitutions
- 宋元以后对公差的尊称
- 宋元以来俗字谱
- 宋元善本书极多
- 宋元大城市里妓院及娱乐场集中的地方
- 宋元宪集
- 宋元戏曲考
- 宋元时对官长的尊称
- 宋元时对贫穷读书人的嘲讽称呼
- 宋元时杂剧和各种伎艺演出的场所
- 宋元时流动卖艺的民间艺人
- 宋元时称民间团体的艺人
- 宋元明都市中游乐和买卖杂货的集中场所
- 宋初三先生
- 宋史
- 宋君复
- 宋哥窑瓷器
- 宋哲宗
- 宋四
- 宋墙
- 宋太宗
- 宋太宗杀兄夺位之典
- 宋太祖
- 宋太祖灭南唐
- 宋女
- 宋妈