于淼 张颖 王栋 崔建伟

摘? 要:档案是社会发展的活化石,是智慧企业的重要组成部分。近年来,档案库藏数量的快速增长与档案管理、编研服务需求之间的矛盾十分突出。
关键词:智能机器人;无人化档案馆;条形码
中图分类号:TP242? ? ? ? ?文献标志码:A? ? ? ? ?文章编号:2095-2945(2020)35-0015-03
Abstract: Archives are the living fossils of social development and an important part of smart enterprises. In recent years, the contradiction between the rapid growth of the number of archives and the demand for archives management and compilation and research services is increasingly prominent.
Keywords: intelligent robot; unmanned archives; bar code
1 概述
档案工作是一项记录历史、传承文明、服务社会、造福人民的事业,是一项党和国家事业发展不可或缺的基础性、支撑性工作,为企业和经济社会的发展作出了重要的贡献。档案馆建设还是智慧城市建设的一部分,1994年在澳大利亚阿德莱德召开的信息通信自动化会议上首次提出“智慧城市”以来,作为智慧城市建设的一个组成部分,智慧档案馆的研究与建设备受档案界重视,学术研究比较活跃。我国自2012年着手智慧城市建设以来,面向智慧档案馆的各项工作逐步展开和落实,并取得阶段性成果。
2 档案管理机器人的结构和控制技术
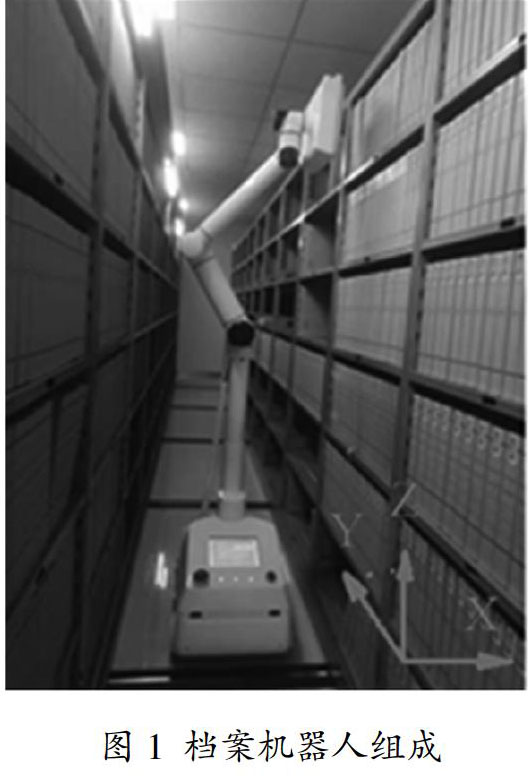
档案机器人由移动底盘、升降台和6DOF的轻型机械臂、条码识别和RFID阅读器组成。
2.1 无人化档案馆库档案定位及其盘点装备的定位技术研究
智慧城市的首要问题是城市元素的定位,对档案进行准确定位同样是实现档案自动化管理首先要解决的问题。此外,为实现智能机器人在馆库的自动行走,机器人本身也存在一个定位问题,定位技术还影响到机器人的总体设计方案。
目前已经发展出多种成熟的城市目标定位技术,如常用的北斗、GPS适合于室外目标的定位;适合于室内目标的定位技术也有多种,如红外定位、超声波定位、WiFi定位、蓝牙定位、超高频和RFID定位、视觉定位等多种技术。这些定位技术已经有应用于图书馆机器人的报道。
研究已有定位技术并考虑档案馆的特点,提出如下机器人和档案方案:
基于条码和RFID技术,实现档案定位到盒,盘点到件的目标:
分析比较上述参考文献几种定位方法的原理、特点和性能,可以发现近场RFID定位技术作用距离可以控制,能在几毫秒内得到档案的大致位置,同时从众多档案中获取档案的标识信息,而且RFID标签的体积小,造价低,易于安装,是目前最适合于档案库房内档案定位和识别的技术。为了实现档案盒的精确定位,在每个档案盒上粘贴档案号条码标签,就可以实现档案盒相对于机器人的坐标定位、以及档案盒在架体的相对顺序定位。
2.2 机械臂的结构及其运动方程求解
目前市场上已经有多种轻型机械臂供选择,这些机械臂多参考了丹麦UR机器人的构形,本项目也采用这种机械臂,但针对档案机器人的特点作了适当调整。如:针对原机械臂外形尺寸偏大,修改了机械臂的内部结构,使外形尺寸变“细”,避免了图2中的第二关节旋转180°时与第一关节的干涉,相应地扩大了机械臂的操作空间;又如:将小臂连杆长度359.8(如图中虚线所示)加长至545.8,避免了小臂连杆与其它关节间的干涉。
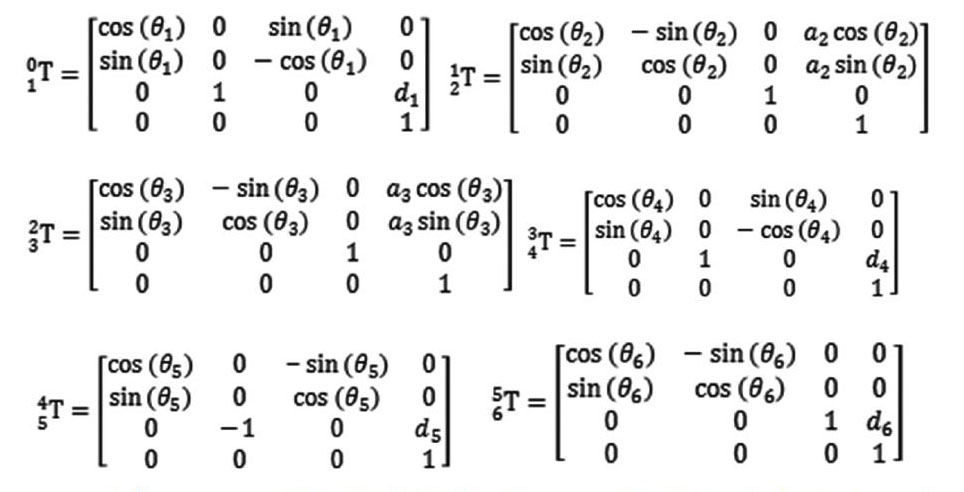
机械臂自身座标系中的DH运动方程是:
式中,θi表示各关节转角,di表示各关节连杆长度,分别在图2中标出。对于给定的关节转角,机械臂末端的位姿矩阵由下式给出:
由于档案架各层高度是确定的,实际调试时无须求出运动方程的逆解,而是采用试算和现场实验的方法得到机械臂盘点时的关节变量参数。试算的优化约束条件是:
条件1:机器人的重心坐標离车体几何中心最近。
条件2:机械臂的所有部位占据的X方向尺寸最小。
试算结果如表1所示。
2.3 系统集成
档案机器人是复杂的机电一体化设备,有多种电气设备,因此设计多总线集成控制系统。
移动机器人模块的驱动系统主要由四台空心杯电机驱动四个行走轮(麦克纳姆轮)实现档案馆库内的平行移动,每台电机上都有一个增量式编码器用以测量行走轮的行走速度,并用来估算位移,四台电机接入一个六轴控制器。移动机器人安装有48V25AH锂电池供电,电源管理系统包括电流保护开关、12V、5VDC-DC电源变换器可以给移动机器人的内部测控设备供电,并设有电压——电量检测功能,用于管控电池电量和电量补充管理;导航传感器阵列由IIC总线连接。驱动、电源管理、导航三大系统通过CAN总线接入移动机器人的微控制器,微控制器通过RS232总线与机器人控制计算机连接。
机械臂模块的六个关节采用模块化设计,关节与关节之间通过CAN总线连接至机器人的控制计算机,由控制计算机上的机械臂控制软件直接控制每个关节。可以看出,移动机器人、机械臂关节都视同CAN总线的一个节点。
盘点仪器有条码识别和RFID识别两个模块,由机械臂末端关节供电。由于盘点档案时通讯速率很高,为了避免总线阻塞引起机械臂的误动作,通过蓝牙总线与控制计算机通讯。
机器人的控制计算机还通过WiFi总线与监控室的档案库管理系统实现数据连接,用于接受盘点指令、下载授权档案管理信息、并上传档案定位盘点结果。
3 实验情况
完成的系统在江苏省电力公司的档案库进行了功能实验,场景如图1所示。该档案库为江苏省公司新建的档案馆,南北距离约40米,东西约25米,中间过道宽约3米,完全采用电动密集架管理档案,电动密集架的动作完全受控于监控室。
密集架分为AB(东西向)两个区,每个区又分为1-4个小区,共8个小区。每个区的密集架数量不等。每个密集架长度为10米,又有前后两侧。每层密集架分为6层,总高度2.4米,每层又分为11节,每节宽度约0.9米。相邻两个架体间的通道宽度仅0.8米,与机器人0.6米的宽度相比,显得十分狭窄。
在库区的所有工作通道进行实验,机器人均可安全通过。其中机器人在中间主过道的速度为0.6米/秒,接近人行走的速度;在工作区的速度视工作情况不同,以适合盘点仪器的工作能力为准。表明机器人的导航定位能力是有保证的。
在AB两侧架区内各选择了4个架面进行实验,机器人完全可以以工作姿态通过工作区,表明机器人有狭窄区间内完成作业的能力。
在实验区分别放置了单件档案盒和多件档案盒。其中多件盒按5、10、15、20、25、30、50的密度各放满一节档案架,机器人可以准确地实现按盒定位、按件盘点的功能。
还通过人为摆放档案,进行了丢件、错件、错位实验,盘点报表均可反应相关结果,也表明机器人具有错件查找能力。
4 结束语
从2018年5月初开始研发盘点机器人,共完成了两代机器人的研发,实现了档案的自动化盘点,从实体档案的密度看,有些2厘米厚的档案盒内装了100多件技术图纸,相当于有100多件档案,盘点仪器还不能胜任如此密度情形下的按份盘点任务,表明盘点仪器的性能仍然有进一步提高的必要。另一方面,也有8厘米厚的档案盒内仅有装订成册的1厚本档案,相当于仅有1件档案,也表明,为了实现无人化档案馆管理,也有必要从档案管理角度规范分册管理标准。
此外,为了便于实体档案的调阅,还应当积极研发档案存取机器人。目前正在完成自动存取机器人的研发。
参考文献:
[1]王媛媛.国内智慧档案馆的现状与发展[J].兰台世界,2017,4:19-20.
[2]项政.基于TOA/AOA的非视距减弱混合定位算法研究[D].南京邮电大学,2016.
[3]张胜军,林若琳.浅谈室内定位技术现状[J].测绘与空间地理信息,2018(7):128-131.
[4]中华人民共和国专利.一种智能档案盒CN107053891A[P].
2017-8-18.
[5]中華人民共和国专利.基于RFID技术的档案柜及文档管理装
置CN103793963B[P].2016-9-7.
- 智慧课堂环境下小学数学互动教学现状、问题及改进思路
- “有限”与“永续”的同一
- 外来务工子女体验式习作探索
- 农村留守儿童普遍存在的教育问题及对策
- 壮族扁担舞在小学校园中的传承与发展
- 浅析农村小学生英语口语交际障碍的成因与对策
- 结构化教学模式用于自闭症儿童美术教学中的有效途径
- 边境农村中学少数民族班英语学习方法的研究
- 壮族三声部民歌的表现手法以及在小学校园中的传承与发展
- 游戏化教学在幼儿园一日活动中的有效实施策略探究
- 基于文学主题的户外运动游戏谈文学作品的选择
- 让经典成为幼儿礼仪行为的翅膀
- 幼儿园区域游戏中教师的指导方法探寻
- 放飞智慧,绽放光彩
- “七步”语音训练法
- 经历体验小学古诗文吟诵教学实践探究
- 非连续性文本问题分析与策略探寻
- 行之有道,开发“齐梁文化”校本课程
- 基于信息不对称造成高校辅导员顶岗实习管理效率失灵原因分析及解决措施探讨
- 以学生为中心的初中英语阅读有效教学探索
- 生本理念下的小学英语单词教学
- 优化教学设计促进学生真学
- 精心设计精彩随行
- 顺学而教:建构“三生”语文课堂
- 挖掘教材人文资源提升学生文化品格
- cut sb off
- cut sb off/cut sb short
- cut sb off from
- cuts both ways
- cut sb/sth off
- cut sb/sth off (from sb/sth)
- cut short
- cuts in
- cut somebody in (on something)
- cut somebodyout (of something)
- cut somethingout
- cut somethingout (of something)
- cuts out
- cut sth back
- cut sth back; cut back (on sth)
- cut sth back / cut back on sth
- cut sth down
- cut sth down; cut down (on sth)
- cut sth down (to sth)
- cut sth off
- cut sth off (sth)
- cut sth open
- cut sth out
- cut sth up
- cut sth ↔ up
- 山曲
- 山曲𡶒
- 山有山神,庙有庙主
- 山有山脉,水有水道
- 山有木,工则度之;宾有礼,主则择之
- 山有木, 工则度之; 宾有礼, 主则择之。
- 山有百草,人有百性
- 山有顶,路有头
- 山有高低,水有清浊
- 山有高低,水有清浊,人有好赖
- 山有高峰,水有激流
- 山朝阳
- 山木
- 山木寿
- 山朵
- 山杏核——苦仁儿
- 山杏核——苦仁(人)儿
- 山村
- 山村景色
- 山村水乡
- 山林
- 山林、花木秀丽
- 山林与泉石
- 山林中害人的怪物
- 山林中的珍品