李鹏

摘 要:随着经济与科技的不断发展,陀螺仪作为导航、制导和控制的核心器件已经更新到第3代。第1代为机电式陀螺,第2代为环形激光陀螺,第2代环形激光陀螺性能较1代有提升,但闭锁问题是其致命的缺点。为了解决这个问题,加入了机械抖动装置的第3代陀螺应运而生—光纤陀螺。它不仅体积很小,而且适用范围广,是目前我国陀螺领域中发展最快的陀螺。
关键词:光纤陀螺;Sagnac效应;数字闭环;信噪比
惯性导航利用陀螺仪计算出的载体旋转角速率精准度很高这一特点,通过微积分学,计算出载体的姿态信息。所以陀螺仪作为惯性导航的重要部件,必须对其关键技术进行数学建模与分析,为进一步实践研究奠定基础。
1 光纤陀螺的种类
以工作原理来分,光纤陀螺可以分成三种。干涉式光纤陀螺(IFOG)、谐振式光纤陀螺(RTOG)以及受激布里渊式光纤陀螺(BFOG)。前者在我国的应用是最为广泛。第二种:谐振式光纤陀螺,通过对谐振腔的应用,代替干涉式光纤陀螺的光纤线圈。谐振腔会因光波的循环而增强陀螺的旋转,所以,这种光纤式陀螺所能够检测的精度要高于干涉式光纤陀螺。第三种:激布里渊式光纤陀螺,这种光纤陀螺与上一种有着很大的联系,通过对大功率的激光器的应用,发射出的光波能够引起散射,最后形成光纤激光器。
2 干涉式光纤陀螺原理与系统建模
2.1 介质中闭合光路的Sagnac效应
光纤陀螺是一个基于光学Sagnac效应的环形干涉仪。Sagnac效应是由法国科学家萨格奈克最早提出并验证的一种光学现象:当闭合光路相对惯性空间沿某一方向旋转时,两束光波所经历的光程不再相等,进而产生一个与旋转角速率成正比的光程差或相位差,这一现象被称为Sagnac效应。
2.2 干涉式光纤陀螺系统建模
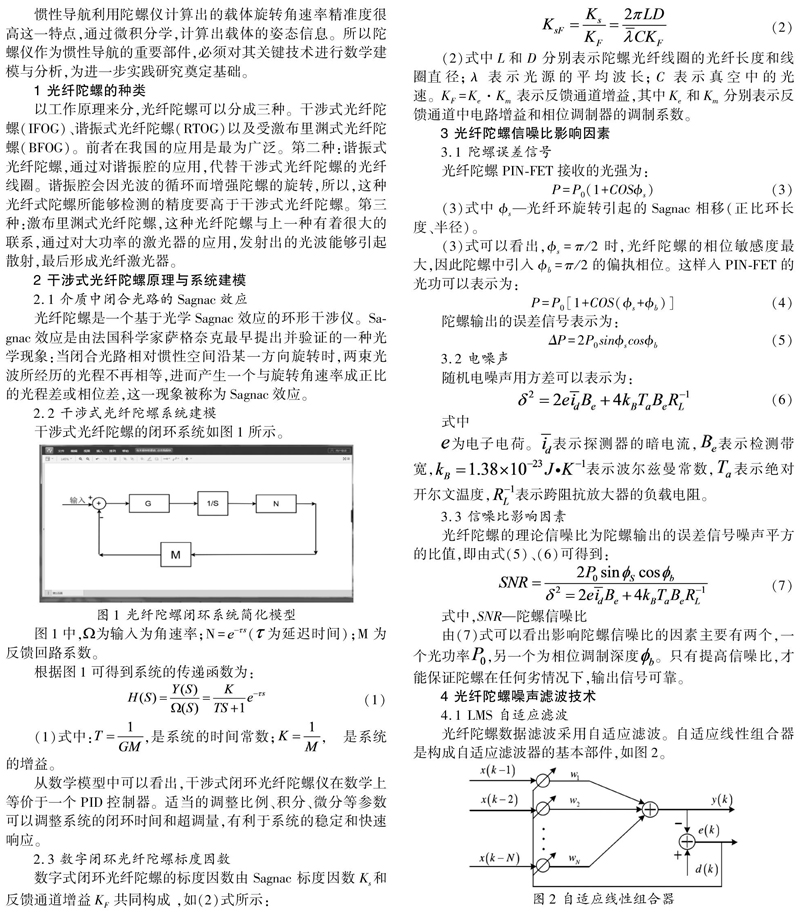
干涉式光纤陀螺的闭环系统如图1所示。
图1中,为输入为角速率;N=(为延迟时间);M为反馈回路系数。
根据图1可得到系统的传递函数为:
从数学模型中可以看出,干涉式闭环光纤陀螺仪在数学上等价于一个PID控制器。适当的调整比例、积分、微分等参数可以调整系统的闭环时间和超调量,有利于系统的稳定和快速响应。
2.3 数字闭环光纤陀螺标度因数
数字式闭环光纤陀螺的标度因数由Sagnac 标度因数Ks 和反馈通道增益KF共同构成 ,如(2)式所示:
(2)式中L和 D 分别表示陀螺光纤线圈的光纤长度和线圈直径;λ 表示光源的平均波长;C 表示真空中的光速。KF=Ke·Km表示反饋通道增益,其中Ke和Km分别表示反馈通道中电路增益和相位调制器的调制系数。
3 光纤陀螺信噪比影响因素
3.1 陀螺误差信号
光纤陀螺PIN-FET接收的光强为:
3.2 电噪声
随机电噪声用方差可以表示为:
为电子电荷。表示探测器的暗电流,表示检测带宽,表示波尔兹曼常数,表示绝对开尔文温度,表示跨阻抗放大器的负载电阻。
3.3 信噪比影响因素
光纤陀螺的理论信噪比为陀螺输出的误差信号噪声平方的比值,即由式(5)、(6)可得到:
由(7)式可以看出影响陀螺信噪比的因素主要有两个,一个光功率,另一个为相位调制深度。只有提高信噪比,才能保证陀螺在任何劣情况下,输出信号可靠。
4 光纤陀螺噪声滤波技术
4.1 LMS 自适应滤波
光纤陀螺数据滤波采用自适应滤波。自适应线性组合器是构成自适应滤波器的基本部件,如图2。
图2中,表示期望信号;表示 N 个受误差信号 自适应控制的权系数 ;对于固定的权系数,输出信号是N个输入信号 的加权后的线性组合,即:
4.2 LMS 自适应滤波器的设计
在设计基于 LMS 算法的自适应滤波器过程中,滤波器的性能与自适应权系数向量W 中的元素个数(即滤波器的阶数) N 以及调整步长 μ 的选择密切相关,是自适应滤波器的两个主要参数。其中 μ 是控制着 LMS 算法的收敛性以及算法收敛的速度,经过分析, μ的选取应满足下列不等式:
5 结语
本文从光纤陀螺数学模型的建立、标度因数的理论表达、信噪比的影响因素、数据滤波方式等四个方面,对光纤陀螺的性能改善进行了研究。以上各方面的分析结果,给干涉式光纤陀螺仪技术的发展提供了部分理论依据,相信光纤陀螺技术会随着时代的发展进一步成熟,在未来会逐步占领陀螺仪市场主导地位。
参考文献:
[1]张桂才.光纤陀螺原理与技术.北京:国防工业出版社.2007.
[2]王巍.干涉光纤陀螺仪技术[M].北京:中国宇航出版社,2010.
[3]吕品,刘建业,赖际舟,秦国庆.光纤陀螺的随机误差性能评价方法研究[J].仪器仪表学报,2014(02).
- 沁润书香,快乐阅读
- 河南省少儿阅读事业发展现状调查与研究
- 耕耘半生仍少年
- 高职院校图书馆行业组织职能探析
- 高校图书馆公共文化产品供给之探索
- 高校图书馆数字资源统计及评价研究
- 广东高职院校图书馆微信服务调查与分析
- 高校数字图书馆信息检索用户认知模型研究
- 微阅读时代高校学生阅读动机与行为研究
- 泛在知识环境下高校图书馆阅读危机的消解机制研究
- 高校大学生阅读推广人培育实践与思考
- 新媒体环境下图书馆阅读推广活动的项目策划与品牌营销
- 焦作市图书馆老年阅读推广实践研究及启示
- 数字时代图书馆阅读推广模式的优化创新
- 国内图书馆儿童阅读推广服务模式比较研究
- 中学图书馆设阅读推广岗位的现实意义
- 高校大学生阅读推广人培育实践与思考
- 新媒体环境下图书馆阅读推广活动的项目策划与品牌营销
- 焦作市图书馆老年阅读推广实践研究及启示
- 数字时代图书馆阅读推广模式的优化创新
- 国内图书馆儿童阅读推广服务模式比较研究
- 面向智库决策的图书馆云服务平台构建研究
- 面向智库决策的图书馆云服务平台构建研究
- 国外有关图书馆社会形象问题的研究述评
- 河南省第六次公共图书馆评估专家培训班在郑州召开
- be in bed
- be in business
- be in cahoots
- be in cahoots with
- be in cahoots (with)
- be incapable/not be capable
- be in character
- be in charge
- be in charge of
- be in charge/take charge of
- be inclined to do sth
- be in conflict with
- be inconsistent with
- be in contact
- be in control
- be in control (of sth)
- be in conversation
- be in credit
- be in custody
- be in danger
- be in debt
- be indebted to
- be in demand
- be independent/lead an independent life
- be indicative of
- 力争上流
- 力争上游
- 力争先进或有利形势
- 力争在最短时间内达到目的
- 力人
- 力何固
- 力作
- 力促
- 力倍功半
- 力倍功寡
- 力倦
- 力倦神疲
- 力偶
- 力克
- 力克群雄
- 力农
- 力农蚕桑
- 力分势弱
- 力则任鄙,智则樗里。
- 力力
- 力劝
- 力劳
- 力势
- 力勤
- 力半功倍