夏伟 吴玉文

摘 要:本文基于MATLAB Robtics Toolbox建立MOTOMAN-HP0020D-A00机械臂仿真模型,并进行机械臂正逆运动学仿真,验证模型的正确性。最后,采用七次多项式插值算法完成机械臂轨迹规划。结果表明。算法准确合理,可为后续机械臂控制设计提供依据。
关键词:MATLAB Robtics Toolbox;仿真模型;运动学分析;轨迹规划
中图分类号:TP241文献标识码:A文章编号:1003-5168(2020)04-0054-03
Abstract: In this paper, a simulation model of MOTOMAN-HP0020D-A00 manipulator was established based on the MATLAB Robotics toolbox, and the forward and inverse kinematics of the manipulator were simulated to verify the correctness of the model. Finally, the seven degree polynomial interpolation algorithm was used to complete the trajectory planning of the manipulator. The results show that the algorithm is accurate and reasonable, which can provide the basis for the subsequent control design of the manipulator.
Keywords: MATLAB Robtics Toolbox;simulation model;kinematics analysis;trajectory planning
随着科技的快速发展,智能制造成为工业生产的核心方向。工业机械臂是先进设计制造中不可或缺的生产设备。对机械臂的运动特性进行研究是进行机器人技术研究的前提,也是机器人研究的重要环节[1]。
在当前的教学中,用实体机械臂进行实践教学代价非常大,因而应用仿真软件研究机械臂特性尤为重要[2]。通过仿真软件可以建立机械臂模型,进行图形仿真,模拟动态特性,直观展示机械臂的工作空间和位姿形态,并获得运动过程中的参数曲线和其他重要信息。这更有利于使用者掌握运动规律,从而规划机械臂的运动特性[3-4]。
本文基于MATLAB Robtics Toolbox进行机器人学仿真,拟应用于实验教学中,对实验室多功能机械臂MOTOMAN-HP0020D-A00进行仿真研究。
1 MOTOMAN-HP0020D-A00机械臂模型建立
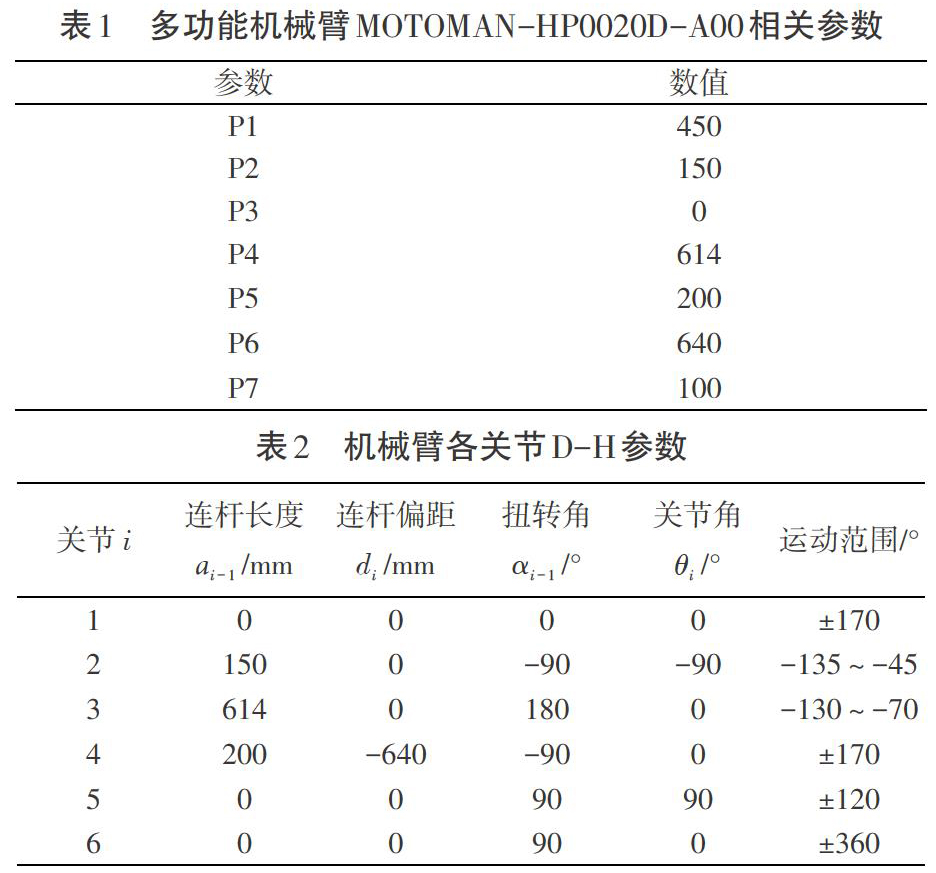
多功能机械臂MOTOMAN-HP0020D-A00主要由基座、上臂、下臂、手臂和手腕组成,如图1所示。有六个自由度,均为旋转关节,J1轴为基座回转运动,J2轴为上臂倾动,J3轴为下臂倾动,J4轴实现手臂横摆,J5轴为手腕俯仰,J6轴为手腕回转。多功能机械臂MOTOMAN-HP0020D-A00相关参数主要参数如表1所示。
已知机械臂的结构模型后,采用改进的D-H法建立MOTOMAN数学模型[5],其连杆参数和关节变量如表2所示。
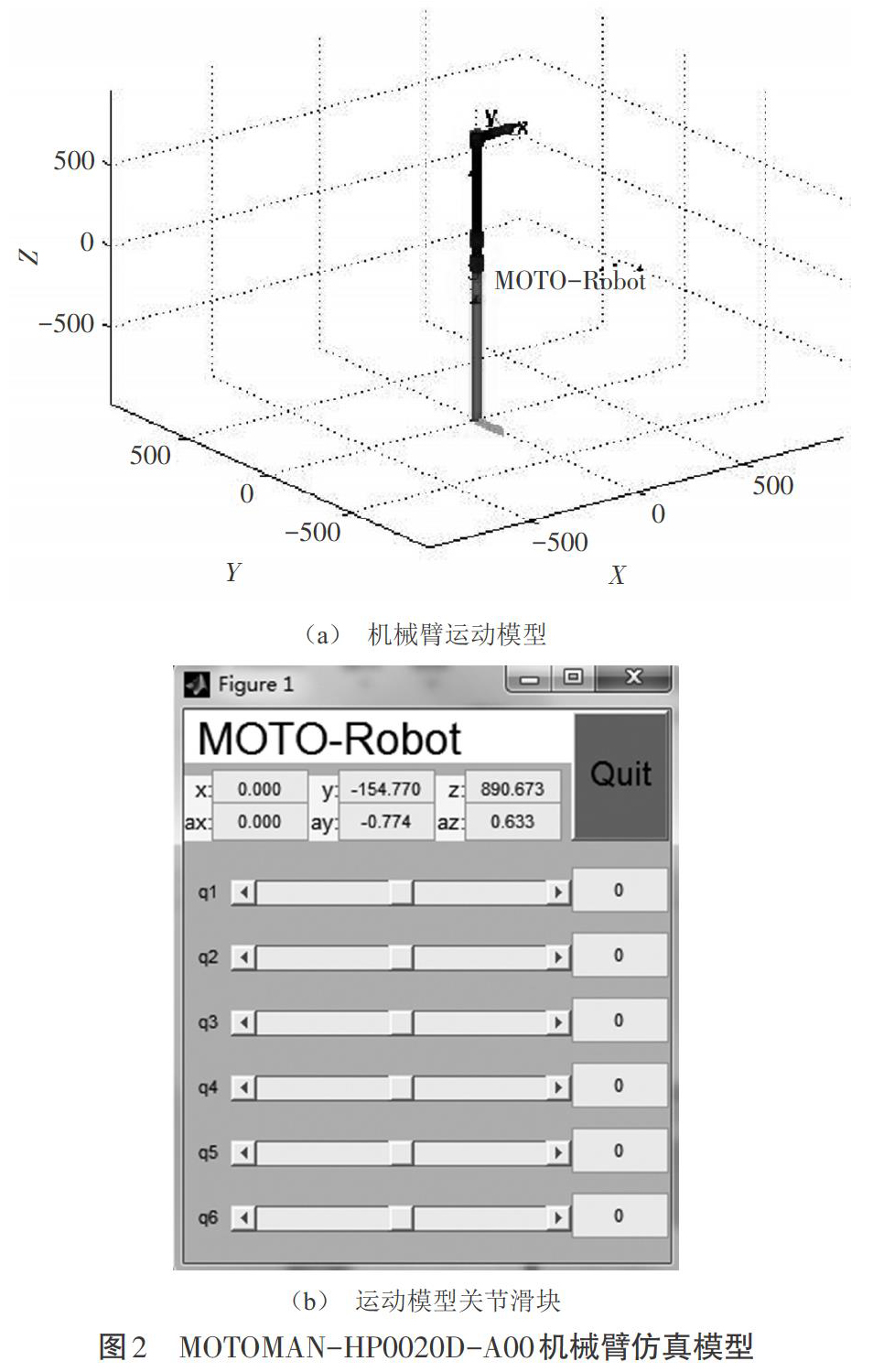
建立多功能机械臂MOTOMAN-HP0020D-A00的参数模型后,基于MATLAB Robtics Toolbox中的link函数构建机械臂仿真模型。其中,link函数的调用格式为:
基于drivebot(r)函数得到空间位姿,如图2所示,初始位姿时各个关节角均为零。通过控制各关节滑块实现机器人不同位姿运动。
2 机械臂运动学仿真
机械臂运动学是机器人进行轨迹规划、控制的基础[6]。基于前述机械臂的仿真模型,在机器人工具箱中,对多功能机械臂MOTOMAN-HP0020D-A00进行机器人正逆运动学仿真。
利用fkine对机械臂进行正运动学仿真,求取MOTOMAN-HP0020D-A00末端执行器的位姿变换矩阵。取六个关节的关节向量为[q=[π/2,-π/3,-π/2,π/5,π/3,π/6]],调用函数格式为:
在MATLAB中求解出机械臂的末端位姿在基座下的变换矩阵[T]为:
逆运动学是已知末端执行器变换矩阵[T],逆解出各关节变量[7]。在MATLAB Robtics中基于ikine函数实现逆运动学仿真计算。函数格式为:
据此可求解出[qi]=[1.570 8,-1.047 2,-1.570 8,0.628 3,1.047 2,0.523 6]。
由此可知,仿真結果中[q=qi],可见,在MATLAB Robtics Toolbox中模型建立正确。
3 机械臂轨迹规划
对于机器人从起始点[Q0]到运动到终止点[Q1]的过程,采用七次多项式插值对该轨迹进行规划。在MATLAB Robtics Toolbox中调用jtraj函数完成插值轨迹规划,采用plot函数仿真过程的末端轨迹状况以及机械臂六个关节的运动参数[8]。末端轨迹图如图3所示。
在运动时间向量[t]=[0:0.05:4]条件下,采用subplot函数求取机械臂末端[X]方向、[Y]方向和[Z]方向的末端位移图。调用格式为:
subplot(311),plot(t,squeeze(T(1,4,:))),xlabel('时间/s'),ylabel('位移/mm'),title('末端位移图')
采用subplot函数求取机械臂末端执行器位移、速度和加速度并展示。机械臂方向位移如图4,末端关节的位移、速度和加速度图如图5所示。
从图4和图5可得出,机械臂从初始点到终止点运动过程随时间的变化曲线及[X、Y、Z]三个方向运动过程随时间的变化情况,运动过程中,曲线无拐点和突变且平滑连续,机械臂在运动过程中结构稳定,无振动。由此可知,应用MATLAB Robtics Toolbox建立机械臂模型正确,符合MOTOMAN机械臂运动要求,且该轨迹規划方法设计合理。
4 结语
本文基于改进的D-H方法,利用MATLAB Robotics Toolbox建立MOTOMAN-HP0020D-A00机械臂仿真模型,并进行了机械臂运动学仿真。仿真结果证明了力运动学模型建立的正确性。同时采用七次多项式插值进行机械臂运动过程的轨迹规划,仿真得到机械臂末端轨迹图像,通过姿态分析求得机械臂从初始点到终止点过程中[X、Y、Z]方向的运动参数,仿真结果验证了轨迹算法的合理性和准确性,为后续机器人研究分析打下坚实的基础。
参考文献:
[1]孙斌.六轴工业机器人的离线编程与仿真系统研究[D].太原:太原理工大学,2014.
[2]左富勇,胡小平,谢珂,等.基于MATLABRobotics工具箱的SCARA机器人轨迹规划与仿真[J].湖南科技大学学报(自然科学版),2012(2):43-46.
[3]谢斌,蔡自兴.基于MATLAB Robotics Toolbox的机器人学仿真实验教学[J].计算机教育,2010(19):144-147.
[4]刘长柱,曹岩,贾峰,等.基于MATLAB Robotics的SCARA机器人运动学分析及轨迹规划[J].机电工程技术,2018(4):121-125.
[5]何价来,罗金良,宦朋松,等.基于蒙特卡洛法的七自由度拟人机械臂工作空间分析[J].组合机床与自动化加工技术,2015(3):48-51.
[6] Sajjad I , Shahzad M K . Biped simulation with Robotics Toolbox for MATLAB[C]// International Conference on Robotics & Emerging Allied Technologies in Engineering. IEEE,2014.
[7]罗宁康,梅益,曹贵崟,等.有限空间约束机械臂动力学协同仿真方法研究[J].机械设计与制造,2017(7):250-253,257.
[8]乐英,岳艳波.六自由度机器人运动学仿真及轨迹规划[J].组合机床与自动化加工技术,2016(4):89-92.
- 虚拟现实技术在艺术设计教学中的应用探究
- 拓展训练在高职体育教学中的运用探究
- 浅析个体内差异评价法在高中英语教学中的应用
- 浅析“体艺结合”教学模式在高职体育中的运用
- 混合动力电动汽车制动力分配方案研究
- 探究模具数控车床加工的理论和实训教学方法
- 基于Android系统的智能家居系统设计与研究
- 浅谈系统论在节能型室内设计中的应用
- 网络广告设计的受众心理研究
- 田径400米领先技术与经验
- 浅议如何提高中职数学课堂的活力
- 浅谈中职市场营销教学中微课的制作与运用
- Multisim仿真软件在电子技能课程中的应用研究与实践
- 基于移动学习环境下高职思政教育教学模式改革的思考
- 基于职业目标的高职课程体系及课程标准建设
- 论超星学习通在城市轨道交通概论教学中的应用
- 做实实践教学环节,推进道路交通事故处理课程教学改革
- 煤矿开采技术专业教学资源库建设研究
- 基于职业岗位能力培养的分层次教学体系研究
- 高职制冷与空调技术专业国际化教学标准的开发与思考
- 船舶电子电气技术专业国际化课程体系建设的对策研究
- 基于BIM技术的工程造价专业教学改革研究
- OBE视域下电工技术基础BOPPPS教学模型应用研究
- 互联网金融课程智慧课堂构建策略研究
- 高职“微生物学”教学改革与实践
- breathalyser
- breathalysers
- breathalyses
- breathalysing
- breathalyze
- breathalyzer™
- breathe
- breathed
- breathe in
- breathe out
- breather
- breathers
- breathes
- breathful
- breathing
- breathingly
- breathings
- breathing space
- breathing spaces
- breathing-spell
- breathing spell
- breathing spells
- breathless
- breathlessly
- breathlessness
- 好彩
- 好征兆
- 好得伙穿一条裤子都嫌肥
- 好得很
- 好得没啥说的
- 好得没法说
- 好得穿一条裤子
- 好得要命
- 好得超过一般水平
- 好得难以用文字、语言表达
- 好德,好善
- 好心
- 好心不得好报
- 好心不得好报。
- 好心不得好报,烧香买鬼叫
- 好心倒作了驴肝肺。
- 好心倒做了驴肝肺
- 好心善良地看待
- 好心好报
- 好心当作驴肝肺
- 好心当作驴肝肺——不识好歹
- 好心当做驴肝肺
- 好心当成驴肝
- 好心待人可以得到好的报应
- 好心得不到好报