基于机器视觉的粮食外观品质检测系统研究
苗驰+王吉豪+陈奎
摘要:粮食外观品质检测对提高我国粮食的市场竞争力具有重要意义。文章提出一种基于机器视觉与机器学习的方法对粮食外观进行品质检测与评级,并设计和开发了一种适合粮食外观品质抽检的装置。机器视觉部分采用NI-Vision实现相机自动控制、图像预处理、品种识别及形态学分析,涉及颜色、几何形态两个特征参数。机器学习部分采用逻辑回归对人工分拣样本进行监督学习,并将模型参数导入LabVIEW应用程序。LabVIEW应用程序采用状态机方式实现人机交互、数据报表及自动检测等功能。系统实测表明,对外观品质检测准确率>90%、粮食品种添加正常、报表清晰。
关键词:粮食外观检测;机器视觉;BP神经网络;虚拟仪器
粮食夕卜观品质检测有利于从源头上把控粮食安全风险,让老百姓吃上安全粮、放心粮,有助于提高我国的农业科技化水平,更好地把控食品安全风险,提高粮食的合格率,提升我国在国际粮食市场上的竞争能力。采用无损的基于视觉技术的外观检测是技术发展的方向之一。
本文基于美国国家仪器(National Instruments,NI)有限公司的LabVIEW及其视觉助手Vision Assistant,以被检粮食颗粒的外观及几何参数为特征量,通过有监督的机器学习的方法对大量统计特征量进行训练、分类及评级,最后以报表形式输出。
1相关技术与系统概述
1.1机器视觉与NI-Vision
机器视觉是随着工业自动化的发展而逐渐完善和发展的应用系统,机器视觉检测技术,依赖成像技术、计算机技术与图像处理算法,同时涉及运动控制技术、人工智能等多领域技术[1]。NI视觉助手(NI-VisionAssistant)拥有集成了400多个图像处理的函数库,可以完成几乎所有机器视觉所能完成的功能,该工具包还可以配合LabVIEW和其他工具包完成大型程序的设计
1.2机器学习
机器学习是人工智能的一个分支,其研究的目标是构建一个能够从数据中自主学习出一定的规律(或模式)并将此规律应用于后续数据处理的系统。作为一个基础性的学科分支,机器学习在许多领域有着重要的应用,例如生物信息学、人工智能、航空航天、现代医学等[3]。
1.3虚拟仪器与LabVIEW
LabVIEW是一种图形化的编程环境,通过驱动相应的硬件,实现传统仪器所具有的功能[4]。由于通过LabVIEW配合USB相机能够快速地采集图像,并对图像进行处理,所以本文程序全部采用LabVIEW,主要包括图像采集控制模块、图像预处理模块、图像数据分析处理模块,还有人机界面、报表输出、文件记录等功能模块[5]。
1.4系统组成和功能
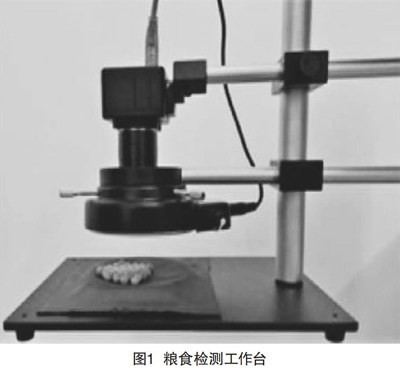
系统基于机器视觉与LabVIEW虚拟仪器架构,旨在实现粮食外观检测与外观品质判定,主要包括300M像素CCD工业相机、6?12mm1/2-1:1.6手动调焦镜头、LED补光灯、检测台、相机支架和PC端LabVIEW应用程序。其实物如图1所示。
软件采用狀态机方式实现程序框架,状态机流程如图2所示,包括用户登录、初始化参数、品种检测、视觉参数设置、外观参数检测、训练数据保存、文件与报表等主要状态。
图像处理、形态学分析由VisionAssistant设计、验证并生成LabVIEW子VI放置在状态机主程序。
系统主要功能:用户登录、粮食品种检测、外观检测、外观品质判定、文件及报表生成,系统主界面如图3所示。
2系统功能实现
系统主要括用户登录、图像处理、品种识别、外观检测、生成检测报告、离线逻辑回归训练等主要功能和过程。2.1用户登录用户登录实现对用户名、密码等进行验证登录,确保测试人员的合法性及用户数据的隐私性与安全性。用户数据保存在文件中,系统读取文件并对输入数据进行比对验证。
2.2粮食种类判别
种类判别实现待检作物的品种判定,其特征量为作物的颜色特征、几何特征。种类判别可实现自动检测,更为后续外观检测过程中的光学参数设定、图像处理环节参数的选择提供灵活的依据[6-7]。因为不同种类粮食外观检测与形态学分析过程中,不同的品种粮食对光学参数、图像处理参数有细微的区别,这些参数的优化由Vision Assistant人工完成并通过参数簇数组的保存与使用种类判别具体的实现过程和算法与1.3节和1.4节所述基本一致,包括图像采集、图像预处理、色彩匹配、几何判定以及逻辑回归组成。预处理过程包括区域选取、亮度、对比度调节。
2.3外观检测
外观检测主要包括图像采集、图像处理分析、形态学处理与分析组成,如图4所示,各品种粮食检测的主要步骤被统一为:二值化、去噪声、粒子滤波等形态学处理与分析。完成粮食作物粒径大小、数量等指标的测量,为后续分类与品质判定提供特征数据。
外观检测过程中主要的图像处理及其结果如5所示。
2.4外观品质判定
品质判定采用多元逻辑回归方法[9],其基本算法流程如下:
假设,其次建立Sigmoid函数
规定:
寻找凸损失函数:
由最大拟然估计推导出单个样本正确预测的概率为:
将上述两个式子合并在一起表示整个样本空间的概率分布为:
作为损失函数,将其最小化。对逻辑回归模型的求解用梯度下降法,首先对函数求导,并带入sigmoid函数表达式得:
之后,将参数更改为:
并且有:
当公式中的逐渐收敛并达到—定条件时,则停止迭代,并记录下最终的的值。
3实验与实测
3.1模型参数训练
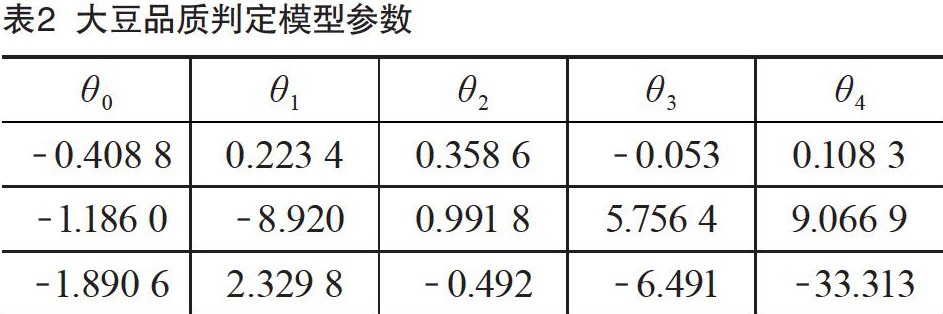
以大豆为例,人工筛选出1,2,3级大豆各500份,对其应用上述装置和方法进行特征参数视觉测量。选取均值、极差、数量、方差4个特征作为后续训练参数,如表1所示。用Matlab对1500组数据进行有监督的机器学习即逻辑回归分析,获得品质判定模型的参数A的值,如表2所示。
3.2模型验证
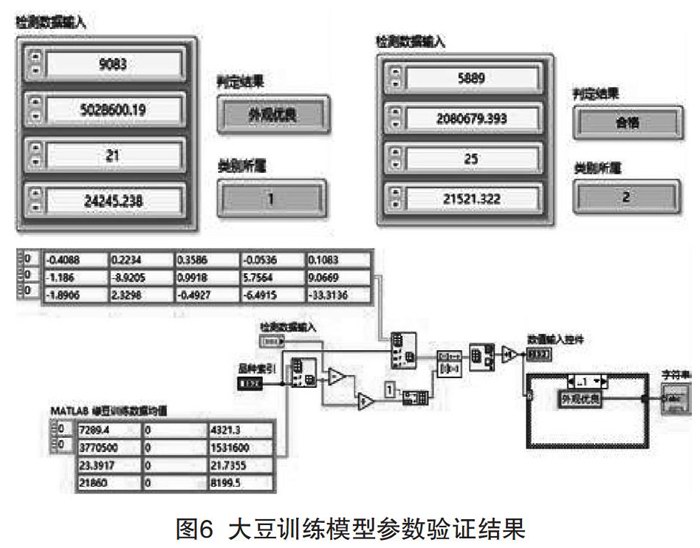
根据训练模型所得到的参数,抽取50组检测数据进行模型参数验证,以检验训练参数的可靠性与科学性,检验子程序如图6所示。
判定模型参数训练的准确率:绿豆为97%,大豆为84%,其原因是送检大显和绿_&原料品质关系。所米购绿本身就区别较大,回归分析准确率高于大豆。采购大豆等级区肉眼几乎无法区分,准确率相对较低,这也说明了模型训练方法以及所得参数的正确性、科学性与合理性。
4结语
机器视觉在农业领域应用研究得到了广泛开展,机器视觉包括图像处理、模式识别、神经网络等技术和方法,对于作物特征的识别、苗情的监测、病虫害的防治以及精细农业的发展都将起到积极的推动作用。与传统的人工检测相比,机器视觉还具有检测速度快、精度高、重复性好等优点。
文中系统在粮食品种的自适应检测、图像处理、形态学[1~分析,外观特征参数的选取、机器学习与深度学习[11]等方面还需要进一步研究和实验。另外,远程操控、网络控制也是监测装置提升性能、提高实用性的解决途径之一。
[参考文献]
[1]陈康.基于机器视觉的冲裁断面质量检测[D].广州:广东工业大学,2016.
[2]於文欣.基于機器视觉的FPC表面缺陷检测研究[D].上海:东华大学,2017.
[3]屠恩美.基于图论的机器学习算法设计及在神经网络中的应用研究[D].上海:上海交通大学,2014.
[4]刘乘,刘俊,刘颖君.基于LabVIEW的包装测试虚拟仪器[J].包装工程,2008(8):89-90.
[5]杨丽丽.基于机器视觉的强化木地板表面瑕疵检测方法研究[D].北京:北京林业大学,2010.
[6]刘力银.基于逻辑回归的推荐技术研究及应用[D].成都:电子科技大学,2013.
[7]刘立波.数学形态学在二值图象处理与分析中的研究及应用[D].西安:西北大学,2002.
[8]任小静.基于计算机视觉的大米外观品质检测技术研究[D].哈尔滨:哈尔滨工程大学,2007.
[9]贾云德.机器视觉[M].北京:科学出版社,2000.
[10]阮奇桢.我和LabVIEW:—个NI工程师的十年编程经验[M].北京:北京航空航天大学出版,2009.
[11]石冬晨.基于虚拟仪器的几何尺寸非接触测量技术研究[D].西安:西安工业大学,2010.
