大尺寸计量技术在飞艇测量中的应用
王勤俭+阳志勇+管鹏举+吴平+丁艳萍
摘要:文章首先介绍大尺寸计量定义、大尺十计量技术及测量仪器发展情况;然后针对湖南航天有限责任公司某大型飞艇嚢体外形结构尺寸测量需求,分析一种基于3D摄影测量装置的大尺寸计量技术,并简要阐述了校准方法。
关键词:大尺十计量;3D摄影;飞艇测量;校准
2002年,美国Estler⑴在文献“Large-scalemetrology-anupdate”中,总结大尺寸计量的特点是通过光线在空气中的传播将测量仪器与测量物体之间的信息进行了转移。这种转移可以是被动的,如摄影测量;也可以是主动的,如激光跟踪仪。
近年来,大尺寸计量发展己经演变成一种精密的工程测量,其中使用激光跟踪仪测量点到点距离的不确定度为2?70pm,采用多边激光测量技术在工业环境下测量不确定度可以达到1X10测量要素也从单一的角度、长度测量扩展到坐标测量和形状测量[2]。大尺寸计量技术的发展使得原有的量传体系己经不能满足要求,首先测量范围不够大,1?2m标准器无法在连续几十米的范围内将标准距离复现,测量精度有限;另外传递的标准要素单一,很少能够实现坐标传递。因此,应用大尺寸测量及校准技术的研究成为计量领域的热点问题。
湖南航天有限责任公司自主研制了多种型号的大型飞艇,飞艇囊体具有复杂曲面结构,如何评价飞艇囊体空间尺寸是否符合设计参数要求成为生产中最常见问题,本文就这一问题提出一种基于3D摄影测量装置的大尺寸计量技术,并简要介绍校准方法,实现对产品质量控制和质量评定。
1大尺寸计量技术及测量仪器的发展
20世纪90年代以前,利用独立元素测量技术解决工程中的几何量测量问题,大尺寸计量技术包含有角度测量和长度测量,涉及光学对准、经纬仪测角、采用自准直法和光电探测技术进行小角度测量、基线尺测距、基于相干光和发射时间原理的绝对测距等。
20世纪90年代以后,采用多元素融合测量技术精密高效地解决工程中的几何量测量问题,大尺寸计量技术包含有激光跟踪技术、3D扫描测量技术、绝对距离测量技术、空间支导线测量技术等,同时强调了环境修正问题。涉及基本理论有坐标测量原理、坐标变换、几何形状与几何元素、数据分析(最小二乘拟合算法、样条曲线、三角网格剖分)、多站三维测量网的定向等[3]。
传统的光学工具测量技术己逐渐被智能化空间坐标测量技术所取代。从20世纪80年代初,面向现场的便携式坐标测量不断出现,其中具有代表性的有:经纬仪及经纬仪测量系统、激光跟踪仪、激光扫描测量系统、3D数字摄影测量系统和室内GPS系统等,人们越来越多地使用这些高精度、可移动式空间大尺寸坐标测量系统来完成定位、放样、检查和校准等测量任务。
大尺寸测量仪器发展趋向于高精度、高效率、大范围、多功能,由于与计算机应用软件相结合,还可以对测量数据进行分析、为加工生产制定决策,未来的工业生产将越来越依赖于大尺寸测量仪器所提供的计量保证。
2大型飞艇的嚢体结构特点
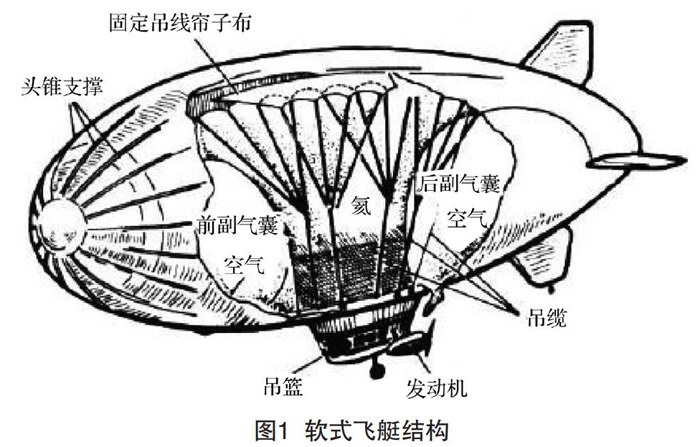
现代大型飞艇一般采用软式囊体结构,常见外形有橄
榄型单囊体结构、双囊体结构、三囊体结构。
软式飞艇结构如图1所示,软式飞艇的外形由外气囊的内夕卜压差来保持。外气囊主要为浮力气体及副气囊的容器,同时,可以抵抗外界环境对飞艇的影响而对飞艇起保护作用。副气囊里面充满着空气,可以在周围温度及高度变化时填充或释放空气来保持外气囊的压差,并且还可以通过充/放不同副气囊的空气来调节飞艇的飞行姿态。另外,副气囊还能起着调节浮力大小的作用,工作原理与潜水艇相同。
外形空间尺寸和体积测量是大型飞艇在测试中的一个重要工作过程,飞艇充气后,现场实际尺寸和体积测量是确认飞艇飞行前重要技术参数,能够为产品飞行试验提供安全可靠参考数据。在飞行试验场中受到外界风场等因素影响,对于直径覆盖3?20m且形状不规则的大型飞艇,如果仅依靠传统的测量方法,不仅工作量繁重,且耗时长,不能准确快速地获得测量结果,显然不适用于实际测量。通过使用3D摄影测量装置就能快速解决此问题,运用全站仪实现大尺寸计量技术使现场测量精度得以保证。
33D摄影测量装置及大尺寸计量技术应用
3.13D摄影测量装置及测量原理
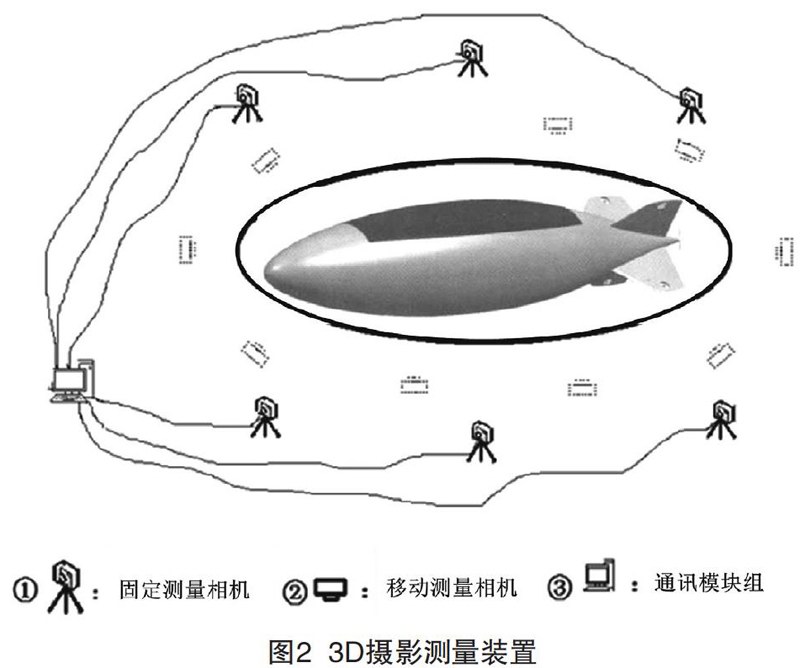
本文所述的3D摄影测量装置包括:6套固定测量相机、2?4台移动测量相机、通信模块组及相关电缆等,如图2所示。
摄影测量装置工作原理是以多相机联合作为传感器,基于计算机视觉原理,结合摄影测量、三角交汇测量等技术实现物体的坐标测量,其是一种满足通视条件的非接触式测量,通過软件将空间场景进行三维重构,进而在三维模型上实现对被测物体三维尺寸的测量。实际应用中,需要根据被测飞艇囊体处于不同风场环境和体积大小,选择2?4台移动测量相机和6套固定测量相机来确保准确、快速完成现场测量工作。固定测量相机分两排布置于被测飞艇囊体两侧,每一侧布置3套测量相机;被测飞艇囊体大小直径覆盖3?20m,为了减少人工冗余劳动、保证测量的完整性,现场采用4套移动测量相机分别对艇体顶部和底部进行拍摄。通信模块组用于控制、存储拍摄的照片,通过测量系统软件处理成可测量的三角网模型,重构飞艇三维模型后,通过对三维模型进行测量得到飞艇囊体的长度、面积和体积。
3.2摄影测量相机参数标定与大尺十计量技术
飞艇摄影测量的主要研究内容是将被测飞艇囊体所处
空间场景从数学模型上进行三维重构。相机的内外参数标定是实现准确的三维重构的一个至关重要的环节,且相机参数标定精确度直接影响最终测量结果。
三维重构后的飞艇是由多组图像拼接成的多曲面封闭结构体,为确保得到准确的空间模型,在摄影测量前,通过构建一个现场校准场,在校准场中布设贴有标志点的精密标定杆(作为校准点),使用全站仪测量校准点和飞艇的囊体表面控制点的三维坐标,建立具有绝对尺度的坐标系。用测量型相机对位置己知的现场校准点进行拍摄,然后利用现场校准点的实际三维坐标和在各测量型照相机所成图像中的位置,计算得到测量型照相机的一系列参数,最终使得现场测量重构得到的校准点三维坐标与校准点实际的三维坐标之间的误差(例如均方误差)为最小,这整个过程就是3D摄影测量装置的校准,也是大尺寸计量技术实现途径。
本文运用全站仪实现3D摄影测量装置的现场校准,涉及以下两个方面的大尺寸计量技术。
3.2.1运用全站仪的坐标系建立技术
全站仪是一种基于光机电一体化技术研制出来的高端测量仪器,主要可以用来测量水平角、垂直角、距离(斜距和平距)、高差等一些物理量。全站仪测量系统是利用空间极坐标的原理来进行测量的,可以同时进行距离的测量和角度的测量。只需一个单一的装置就可以完成测量任务,使用灵活方便,测量距离远,适用于大范围的测量。
坐标系的建立过程:建立坐标系的方法依据三角交汇原理,利用参考杆(精密标定杆)将两台相机统一到同一个测量坐标系下,参考杆长度可根据被测空间的大小进行选择。每个杆上嵌有数量不等的精密标志点,相邻两个标志点之间的距离己经预先标定过。首先相机瞄准被测物体(注意:相机无须进行水平调准其次将参考杆放置在测量空间内(方向不限),按下相机曝光按钮,完成一次测量:然后改变参考杆的放置方向,重复测量多次,参考杆放置的位置最好能够包容整个测量空间。这样获得的信息可以很快地建立起系统坐标系,此时相机的方向与位置可以精确获知,所需的测量空间也被完整地描述出来。
3.2.2测量相机参数校准及测量技术
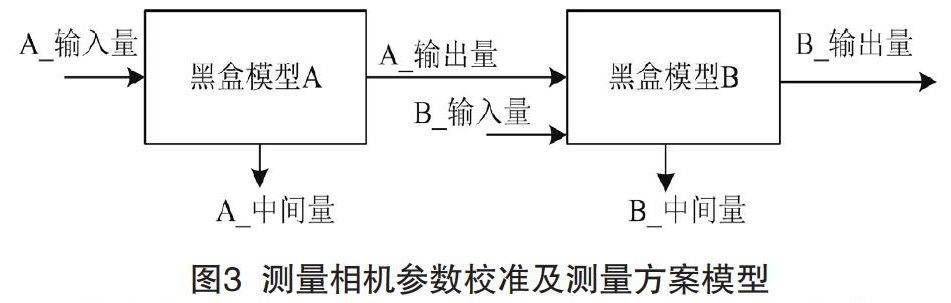
测量相机参数校准方案视作一个黑盒模型A,测量方案视作另一个黑盒模型B,如图3所示。
黑盒模型A输入量是:全站仪的直接观测数据(角度和距离)、固定式量测型相机拍摄的照片、固定式相机的内方位元素(IOP)。
黑盒模型A中间结果是:地面控制点的三维坐标(XYZ)、人工标志点的三维坐标(XYZ)、照片上量测的人工标志点的像点坐标(xy)。
黑盒模型A输出是:固定式相机的外方位元素(EOP)。黑盒模型B输入是:固定式和移动式相机的IOP、固定式相机的EOP、人工标志点的三维坐标(XYZ)、定式和移动式相机拍摄的照片。
黑盒模型B中間结果是:照片上大型飞艇表面的大量特征点的像点坐标(xy)、这些特征点的三维坐标(XYZ)。
黑盒模型B输出是:由特征点的三维坐标(XYZ)拟合得到的飞艇三维模型、飞艇的空间尺寸和体积。
3D摄影测量装置的现场校准主要完成对测量相机外参数标定,测量相机内参数预先通过专业室内校准完成。测量相机外参数现场标定及测量过程流程如图4所示。
4结语
在介绍大尺寸计量定义及测量仪器发展基础上,分析一种应用于某大型飞艇囊体外形结构尺寸测量的3D摄影
测量装置,总结该装置工作原理和校准方法,为深入研究大尺寸空间测量技术及校准技提供了思路。本项目研究成果对大型艇库或试验场中的飞艇,能快速、准确地进行外形尺寸与体积校准检测,应用前景较好。
[参考文献]
[1]ESTLERWT,EDMUNDSONKL,PEGGSGN,etal.Large-scalemetrology-anupdate[J].CIRPAnnals-ManufacturingTechnology,2002(2):587-609.
[2]张剑宇.大尺寸测量校准技术分析[J]·科技风,2010(10).219,228.
[3]马骊群.大尺寸计量技术发展(仪器、校准、应用)[C].北京:机械量测试技术与仪器2012年学术交流会,2012.
