船舶锚泊可视化远程控制系统的研制
王水富++周骏
摘 要:针对目前船舶锚泊远程控制系统操作精度低、稳定性不高、无可视化操作等缺点, 基于ARM嵌入式系统,进行了遥控式船舶锚泊远程控制系统的设计与开发,并在实验室条件下,对所研制的船舶锚泊可视化远程测控系统的主控面板进行了测试实验,测试实验表明:码头主控系统能接收锚泊现场信息,还能定量计算船舶走锚概率,并显示和发出锚泊预警信号,系统的响应时间能控制在5秒之内,洋流流速检测误差低于5%。
关键词:船舶锚泊系统 可视化 远程控制
目前,国外对于船舶锚机、锚链的稳定性研究大多集中在锚机系统的设备研发和生产阶段,但对具体海况(比如浙江舟山海域)中锚泊系统的动态稳定性研究不多,相关产品的操作精度和稳定度不高,也没有实现操作过程的可视化。本文基于ARM嵌入式系统进行了遥控式船舶锚泊远程控制系统的设计与开发,并在实验室条件下,对所研制的船舶锚泊可视化远程测控系统的主控面板进行了测试实验。
船舶起锚操作运动学和动力学描述
1、起锚操纵运动数学模型
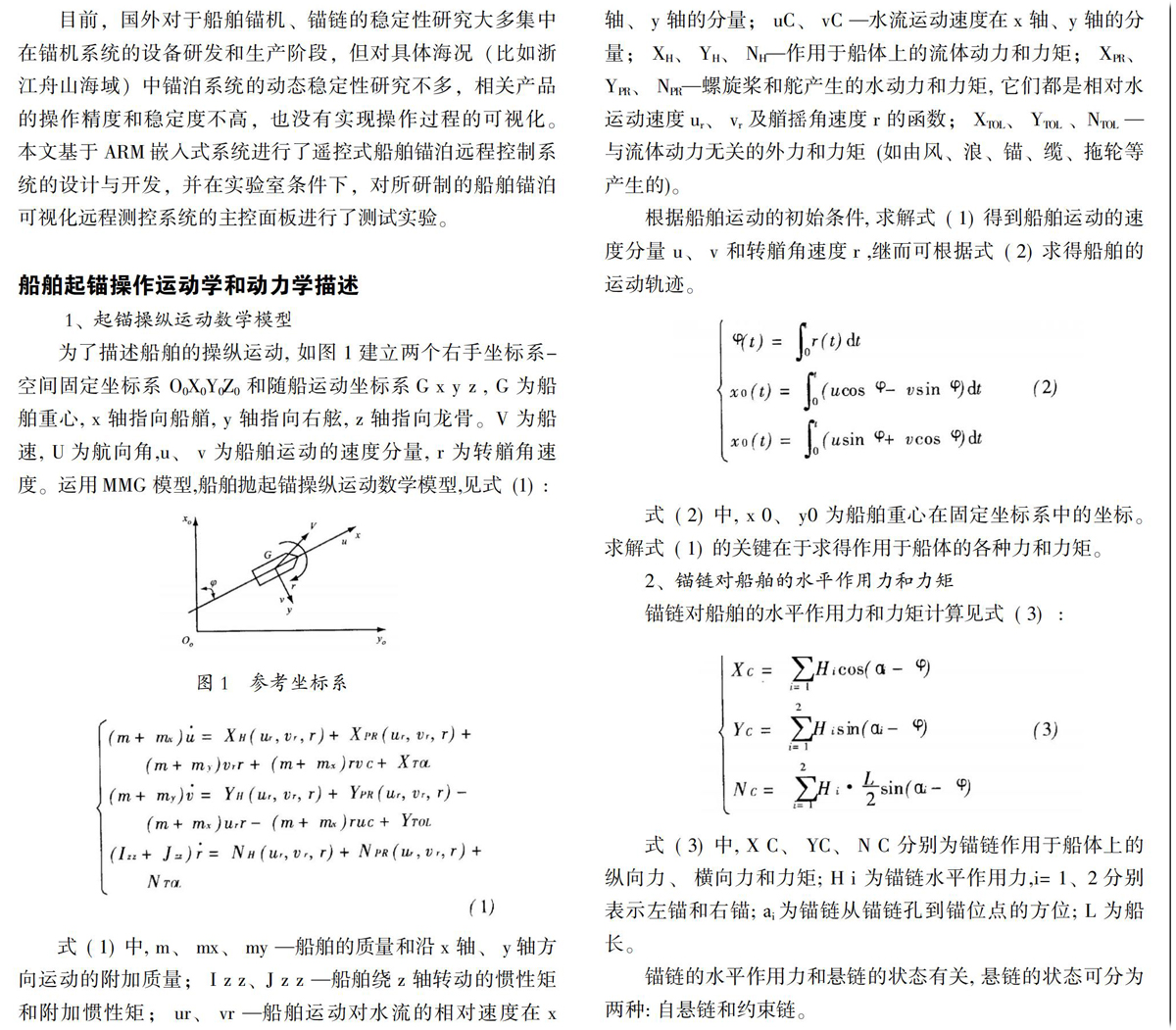
为了描述船舶的操纵运动, 如图1建立两个右手坐标系-空间固定坐标系 O0X0Y0Z0 和随船运动坐标系G x y z , G 为船舶重心, x 轴指向船艏, y 轴指向右舷, z 轴指向龙骨。V 为船速, U为航向角,u、 v 为船舶运动的速度分量, r 为转艏角速度。运用MMG 模型,船舶抛起锚操纵运动数学模型,见式(1):
图1 参考坐标系
式( 1)中, m、 mx、 my —船舶的质量和沿x 轴、 y轴方向运动的附加质量; I z z、J z z —船舶绕z 轴转动的惯性矩和附加惯性矩; ur、 vr —船舶运动对水流的相对速度在x 轴、 y 轴的分量; uC、 vC —水流运动速度在x 轴、y 轴的分量; XH、 YH、 NH—作用于船体上的流体动力和力矩; XPR、 YPR、 NPR—螺旋桨和舵产生的水动力和力矩, 它们都是相对水运动速度ur、 vr 及艏摇角速度r 的函数; XTOL、 YTOL 、NTOL —与流体动力无关的外力和力矩(如由风、浪、锚、缆、拖轮等产生的)。
根据船舶运动的初始条件, 求解式( 1)得到船舶运动的速度分量 u、 v 和转艏角速度r ,继而可根据式( 2)求得船舶的运动轨迹。
式( 2)中, x 0、 y0 为船舶重心在固定坐标系中的坐标。求解式( 1)的关键在于求得作用于船体的各种力和力矩。
2、锚链对船舶的水平作用力和力矩
锚链对船舶的水平作用力和力矩计算见式( 3) :
式( 3)中, X C、 YC、 N C 分别为锚链作用于船体上的纵向力、 横向力和力矩; H i 为锚链水平作用力,i= 1、2分别表示左锚和右锚; аi 为锚链从锚链孔到锚位点的方位; L 为船长。
锚链的水平作用力和悬链的状态有关, 悬链的状态可分为两种: 自悬链和约束链。
船舶锚系统远程控制系统的组成与工作原理
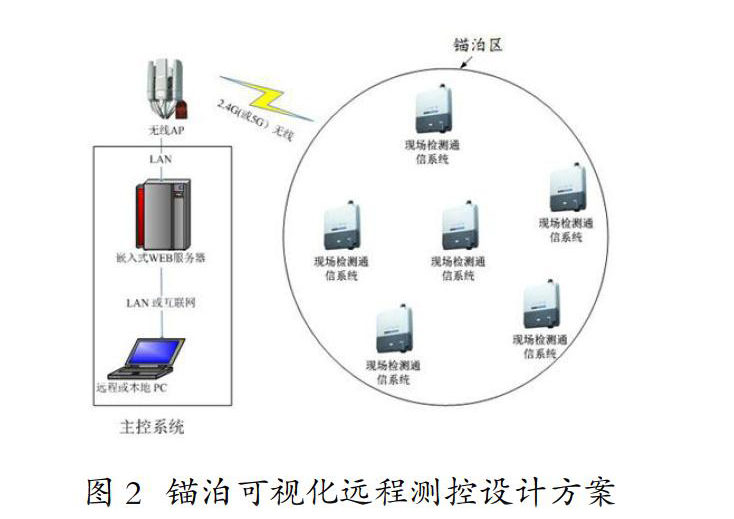
一种船舶锚泊测控系统,包括码头主控系统、现场检测通讯系统和无线AP设备,现场检测通信系统和主控系统之间通过基于Internet、WiFi的无线AP设备实现信息传输;码头主控系统由web服务器和无线或远程pc机构成,两者通过互联网相连接,现场检测通讯系统由锚链受力检测模块、海浪声贝检测模块、海流流速检测模块和现场通讯系统构成,链受力检测模块、海浪声贝检测模块和海流流速检测模块通过并口线与现场通讯系统进行数据传输,现场通讯系统通过内置的无线模块实现与无线AP设备的信息传输连接。
码头主控系统,以嵌入式WEB服务器为主,采用模糊控制理论,建立锚泊安全预测的数学模型,内嵌于WEB服务器之中,实现锚泊设备的安全预警和紧急情况下的远程控制。
本系统的工作原理为:先将各船只型号的代码和对应实测的锚链受力、海浪声呗和海流流速数据输入到WEB服务器之中,当船舶处于恶劣海况下时,锚链受力检测模块、海浪声呗检测模块和海流流速检测模块时刻将检测到的数据通过并口线传递给现场通讯系统进行处理后,由现场通讯系统通过无线网络发送给无线AP设备,经无线AP设备传递给web服务器,然后web服务器将得到的数据进行处理,比如某鱿钓船的最大锚拉力将要8000N时、海流流3m/s以上或海浪声呗78dB以上中的其中一个条件达到,即判断出锚泊处于走锚危险状态时,向船上远端发出预警信号,提示船员检查锚泊状况或采取措施进行人工锚泊操作;当满足两个条件时,码头主控系统判断出锚泊处于走锚危险状态时,若预警信号得不到响应或反馈,启动远程锚泊操作命令,抛出预备锚泊设备,以增强锚泊安全性。
图2 锚泊可视化远程测控设计方案
码头主控系统设置有软件用户界面,图形显示锚机工况现状,实时接收和显示海况数据及锚泊受力数据,并根据接收到的数据,判断锚泊系统的安全系数;当码头主控系统判断出锚泊处于走锚危险状态时,向船上远端发出预警信号,提示船员检查锚泊状况或采取措施进行人工锚泊操作;当码头主控系统判断出锚泊处于走锚危险状态时,若预警信号得不到响应或反馈,启动远程锚泊操作命令,抛出预备锚泊设备,以增强锚泊安全性。
船舶锚泊远程测控系统的测试试验
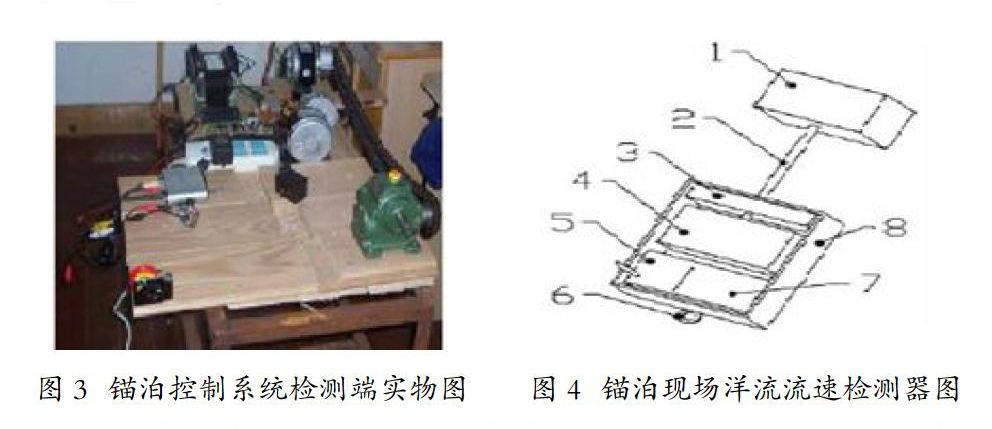
首先在实验室搭建调试平台,其中检测端如图3所示,包括电动锚机、齿轮减速箱、锚链绳、链轮、滑轮、40公斤无杆锚模型、交流变压器、整流桥堆、H 桥驱动控制、单片机最小系统、锚泊信息通信模块、锚链视频收发器等。然后测试电动锚机的加减速控制、正反转控制、无线数据及视频传输等,逐步增大通信距离测试系统的通信及控制可靠性。从操作便利和价格考虑,实验选用 9 英寸 CRT 模拟电视作为视频监视器。
图3 锚泊控制系统检测端实物图 图4 锚泊现场洋流流速检测器图
测试实验所用的洋流流速检测器见图4 ,包括悬浮体、连接杆、压力传感器、压块、无线发射模块、吊耳、控制芯片等,悬浮体连接在连接杆的一端,连接杆的另一端穿过外壳和压力传感器连接在压块上,压力传感器位于压块和外壳之间,无线发射模块和控制芯片安装在外壳内的下部,两者通过信号线相连接,外壳外部下端还设有吊耳;连接杆为钛合金材料,表面粗糙度为0.3 。
洋流流速检测器的优点是,可以将洋流的流速传递到船上信息采集系统,无需下水测量,大大节约了检测成本,同时也更加安全。工作过程,本装置通过吊耳固定在洋流区域,悬浮体在洋流的冲击下,带动压块压向压力传感器,压力传感器通过控制芯片的处理变成流速信号,通过无线发射模块发射给船上采集系统,采集系统即可读取所在区域的流速。
在实验室完成模块设计与系统集成后,进行了实验室测试。采用这种新型船舶锚泊可视化测控系统,通过远程测控就可判断是否走锚,并可自动采取对应的措施,其设计简洁高效,它的运用可基本上杜绝走锚现象,并可以保护海上建筑设施。
结论
测试结果表明:锚泊现场采集系统能采集、保存和发送洋流速度、风速、锚链受力等信息,其中洋流流速等检测误差低于5%;码头主控系统能接收锚泊现场信息,还能定量计算船舶走锚概率,并显示和发出锚泊预警信号,系统的响应时间能控制在5秒之内。
(作者单位:扬帆集团股份有限公司)
