基于AT89S52单片机的智能搬运小车设计
彭川桃+杜忠杰

摘要:在工业生产中,物料搬运费用常常占总生产成本的30%?95%,而智能搬运小车是一种模拟人的搬运动作,按照预定程序,实现物料搬运的机电一体化装置,代替了人的劳作,大大节省了生产成本。文章基于AT89S52单片机对智能搬运小车设计做简要分析,对控制器、电机、传感器等模块进行选择和优化。最后通过多次测试得出,这款智能搬运小车能高效地完成搬运任务,可以在工业自动化中发挥出重要作用。
关键词:单片机;智能搬运;工业自动化
各行各业都有搬运过程,随着经济的快速发展,人工搬运不能完全满足市场的需求。而智能搬运小车可安装在不同的场所以完成不同的任务,因此被广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、码垛搬运、集装箱等的自动搬运。使用智能搬运小车会使得过程质量控制更有效,同时减少了检测环节,在很大程度上控制了企业的人工成本和质量成本。
1 硬件搭配优化设计
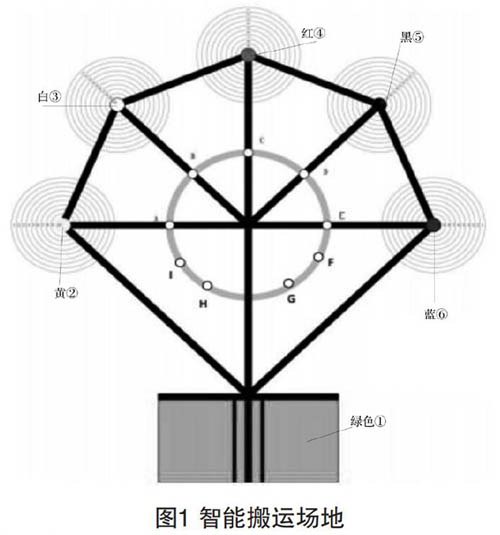
本智能搬运小车是一个基于单片机的轮式移动小车,利用各种传感器在规定时间内完成智能扫描5个目标物料并准确地将其搬运至指定位置的任务,具体如图1所示,智能小车要能从绿色①出发区出发,到达场地中心后,自动扫描物料的方向并确定物料的距离,到达可夹取的范围后,识别区域并将其快速准确地搬运至指定区域,共需搬运5块区域分别为黄②、白③、红④、黑⑤、蓝⑥的不同的物料,最后回到出发区并停止动作。故本小车系统主要由控制器、直流电机、传感器等模块构成。为更好地实现各模块的交互,经反复论证,最后确定方案如下:控制模块、电机驱动、线巡迹、物距检测、颜色识别分别采用AT89S52单片机、L298N集成芯片、DM-S53401灰度传感器(QTI),HC-HR04超声波模块、DM-S28302B颜色传感器。
2 系统理论分析
2.1 控制模块
控制模块采用AT89S52单片机,其性能如表1所示。
AT89S52单片机属于Atmd公司推出的AT89系列芯片,有以下特点:可重复擦写1000次以上、低功耗、8位Flash,在系统开发过程中可以十分容易地进行程序的修改,大大缩短了系统开发周期。
2.2 电机驱动模块
直流电机非常容易实现调速,此次采用集成芯片L298N构成驱动电路。L298N是一款输入电压可达50V,输出电流可达3A,使用PWM控制技术的大电流电机驱动芯片,是双H桥高电压大功率集成电路,可用来驱动直流电动机和步进电动机等电感性负载。小车的电机驱动电流一般都在1?2A之间,输入电压在9?15V之间,使用单片机控制L298N芯片使之工作在占空比可调的开关状态,可以精确地调节电机转速。系统采用脉宽调速技术,通过改变脉冲宽度t来改变电枢回路的平均电压,从而得到不同大小的电压值,实现直流电机的平滑调速。
2.3 线巡迹模块
QTI传感器是一种红外传感器,它利用光电接收管探测其所面对的表面反射光强度。当QTI传感器面对一个暗的表面时,反射光强度低;面对一个亮的表面时,反射光的强度高。反射光强度的不同对应输出不同的电平信号。在本文中所使用到的DM-S53401探测到黑线时输出高电平(5V),探测到白线时输出低电平(0V)。此次使用6個QTI组成巡线组,根据6个QTI反馈的电平信号换算成一个6位二进制数,针对每种数值对电机发出不同指令,从而实现精准的巡线功能。
2.4 物距检测模块
要实现物料的精确摆放,智能小车必须要安装一个“看得见”的眼睛,使用HC-HR04超声波模块,可实现2?400cm的非接触式距离检测功能,精度S高达2mm,模块主要有声波发生器和接收器以及控制电路组成,它非常方便与单片机连接,只需要TRIG和ECHO两个10口即可控,给TRIG输入至少10|is的高电平,模块自动发射8个40kHz的方波,自动检测是否有回波。回波通过ECHO返回,ECHO输出高电平,高电平持续时间就是超声波从发射到返回经过的时间。
在AT89S52中,回波信号己被其内部程序处理转变成一个PWM信号从ECHO端输出,在使用时,只需要读出PWM信号高电平的时间7,通过发射信号到收到回波的时间间隔计算等到距离。如果没有检测到回波,回响信号脚就会输出140|is的电平,以防止发射信号对回响信号的干扰。
2.5 颜色识别模块
当小车执行送物料子任务之前,必须先确认被送物料的属性(颜色),才能发出下一步该往哪个方向走的指令。这个模块选用DM-S28302B颜色传感器,它由TCS230感应芯片、白光LED、瞄准镜和连接线等组成,采用RGB三色原理识别颜色。识别颜色之前,需要进行白平衡调整,使得颜色传感器对白色中RGB三原色输出相等。识别颜色时,由TCS230感应芯片对所测颜色的R,G和B参数进行调整。参数调整方法:依次选通3种颜色的滤波器,然后对TCS230的输出脉冲依次进行计数。当计数到255时停止计数,分别计算每个通道所用的时间,这些时间对应于实际测试时TCS230每种滤波器所采用的时间基准,在这段时间内所测得的脉冲数就是所对应的R,G和B的值,根据R,G和B的值判断物料颜色。
3 程序设计
程序是智能搬运小车的核心,程序设计分4个子任务:一个是巡线,这个任务贯穿整个搬运过程;第2个任务是测S巨,这关系到取物与送物的精准度;第3个任务是识别颜色,只有获取了物料的颜色属性后才能判断其运送方向;第4个任务,也是最基础的任务,电机驱动,它控制着小车的前进后退逆转顺转及其速度。各个子任务相互贯穿相互交互,如图2所示。为保证小车能够完成智能搬运,先对每个子任务编写一个或多个子程序,简化任务,最后根据系统整体控制方案开发完整的主程序。编好主程序之后进行大量的实验,调试程序并简化程序,最终增进搬运小车的准确性与稳定性,实验及调试过程在此不再赘述。
4 测试与分析
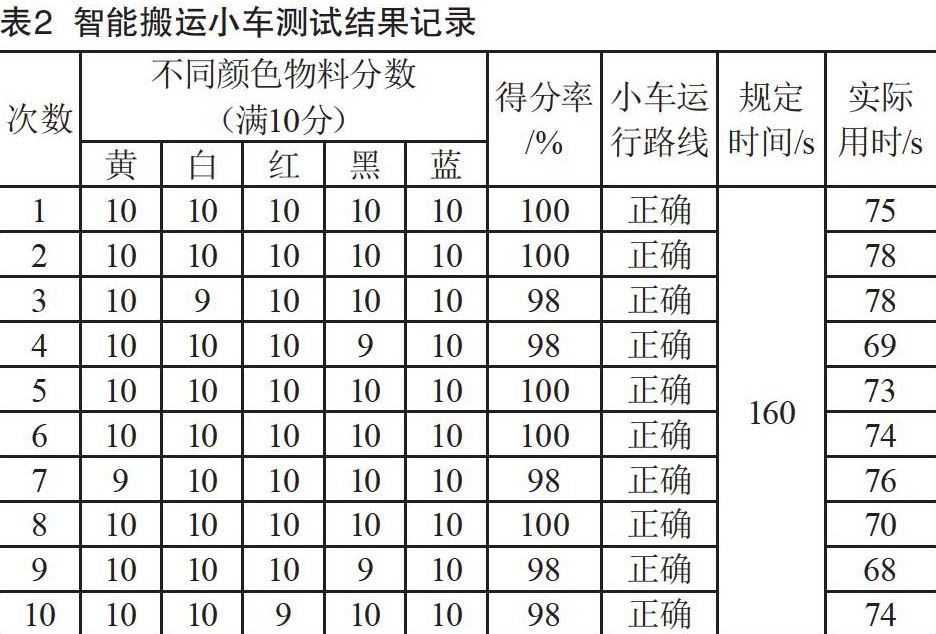
小车调试完毕后,进行了10次搬运测试,结果如表2所示。
测试结果表明,平均得分率高达99%,平均耗时73.5s,低于规定时间的1/2,测试结果优秀。
5 结语
为节约在工业生产中的物料搬运费,减少人工的劳作,本文基于AT89S52单片机设计了智能搬运小车,该搬运小车具有体积小、空间占用少、结构简单、扩展性好、易于移植等特点。测试表明其能够应用于工业自动化中的自动化物流系统。
[参考文献]
[1]孙宝法.微控制系统设计与实现[M].北京:清华大学出版社,2015.
[2]李传娣,赵常松,李继超.单片机原理、应用及Proteus仿真[M].北京:清华大学出版社,2017.
[3]彭天然.物料搬运移动机器人机械与控制系统设计与研究[D].合肥:合肥工业大学,2016.
[4]张建民.机电一体化系统设计[M].北京:高等教育出版社,2013.
