基于物联网的泥沙淤积监测技术研究
陈娟

摘 要:文章主要介绍了我国内河航道及水库的淤积现状,针对大部分航道存在的淤积严重、监测难度大等问题,提出了基于物联网的泥沙淤积监测技术。重点介绍国内外泥沙淤积监测技术的研究背景、现状、监测系统基本原理、系统组成及对无人机平台的改进和优化,阐述此方案的发展前景。
关键字:泥沙淤积;监测;物联网;无人机
1 概述
随着近几年来人類影响的广泛加深,对内河航道及水库的监测和治理变得十分复杂。长江流域水土流失日益加重,已高达流域面积的31%,宜昌段多年平均输沙量5.3亿t,平均含沙量1.2 kg/m3。虽含沙量不大,但输移过程极易淤积,泥沙淤积导致河道堵塞,洪水宣泄不畅,河湖调蓄能力降低,水位抬高。这些现象在我国其他内河航道及水库中都普遍存在,严重影响了工农业发展和生活水平的提高。
为了做到及时合理地整治,在不影响航道船舶正常通航和作业的条件下,及时发现泥沙淤积的问题,减少治理航道所需人力物力财力,创造更好的通航条件。必须总结一套符合我国实际的泥沙淤积实时监测技术。具备适宜的航道水深是船舶安全航行和提高航道效益的基本条件,实时了解水深数据是掌握泥沙淤积规律的重要手段。我国目前最常用的是船载声纳测深法,即利用船载声纳设施与GPS技术相结合进行实地观测。这样将使航道的正常经营受到影响,也不适用于淤积变动快的港口航道,受水面环境影响和限制较大。此外,靠超声波测深仪和测量船来实现航道水深测量,往往航道水深数据刚被发布, 航道水深又产生了变化,监测的时效性得不到保障。国际上现有LADS(机载激光测深),SHOALS系列(扫描水文运行机载激光雷达测量)等几种LIDAR测深系统。考虑到设备价格高,需要高技术人员操作等因素,不适合推广使用。
在当今信息化时代,物联网技术高度发展,使自动化、智能化、无人化控制成为可能。物联网在国际上又称传感网,是基于互联网产生的,一种以互联网为主体联结多种传感设施形成的大型应用型网络。物联网能够通过“物物交换”“人机交互”两种交互模式完成人、物、机三者之间的通信,经由传感器技术和辨认技术等,使实时监控和完全自动化成为可能。近年国内外开始有人研究利用测深仪和AIS设备构建航道水深实时监控系统,并将数据通过处理生成电子海图,从而实现实时了解航道的水深信息,但这种方法依然存在操作管理麻烦,会受一定环境因素制约等缺陷。
2 创新特色概述
无人机可以定点起降,快速而又便利,可在人为预先定出飞行航线后自主航行并进行拍摄,能精准地控制航线,且航行安稳,可控性、安全性能好。目前我国监测大都采用无人船,需要反复多次地航行测量,不仅会降低航道运行效率,且像湿地、滩涂等区域时而露出水面,时而淹没于水下,有人船和无人船也无法到达。这种情况下,无人机小巧、机动、灵活、便利,安全稳定的优势就大大显现了出来。根据测水深的需求,在无人机底部安装面积较大的浮板,增加接触面积以减小压强,无人机可以垂直起飞,快捷地抵达相应区域。此外,无人机与GPRS数据、GPS定位仪、采集通讯模块及VB计算机测控软件等的结合,将实现实时、准确、快速又低风险的航道泥沙淤积监测。无人机与物联网系统相结合,能在各种水上环境实时监测水深变化,经过数据处理系统,将水深变化转换成函数,通过物联网技术绘出水底地形图,了解泥沙淤积准确情况,这适应了港口建设和保证航道安全的迫切需要。
(1)在无人机结构方面:现有无人机基本机构的基础上增加超声波传感器、GPS和GPRS系统,并在无人机底部加上两块面积比较大的浮板。
(2)在无人机功能方面:把握无人机俯仰、滚转姿势的控制与稳定、高度控制与稳定、速度把握与稳定、侧向偏离控制以及俯冲、降落控制等性能,更好地使无人机发挥作用。
(3)在超声波测深方面:超声波测深的工作原理,可用于编程中自动解算数据。在水下,声波能较好地传播信号。按照水深仪的原理,超声波换能器能向水下发射超声波,并同时进行计时,超声波在水中传播时碰到水底就立刻返回来,收到反射波的换能器立即终止计时。超声波在水中传播,其速度约为1 500 m/s,由计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=1 500×t/2。在编程中,利用公式由计算机自动解算水深数据。
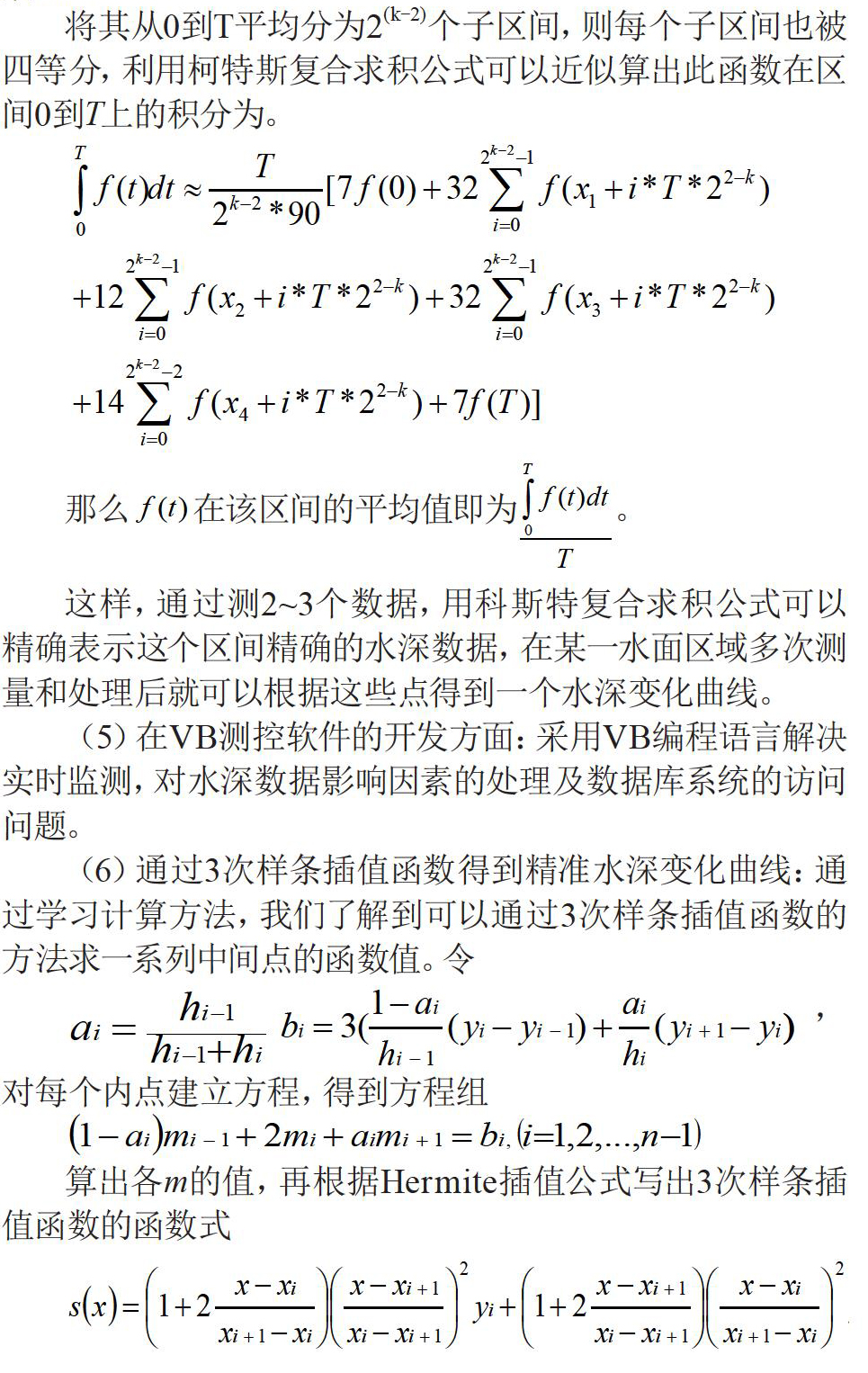
(4)消除水面风力、波浪对水深数据的影响:通常情况下,在水深测量的工作过程中有诸多不利的影响因素。其中波浪的影响最大,波浪对水深测量的影响与测线方向以及无人机的大小和抗风能力有关,波浪影响了无人机的平衡性,所以在风浪中,换能器也会有上下、左右以及前后的起伏和摆动,即使在相同地点,波谷和波峰的数据差异也特别大。此时测深仪里面所记录的模拟信号会产生明显的锯齿状,如果这种误差不加以处理,水深地形图上会出现忽高忽低的情形。无人机在同一地点不同时间测得的高程是不同的,换言之,测得的高程是有关时间t的一元函数,因此无人机在测定高程时需要在水面上停留一段时间测得多组数据,消除水面风力和波浪影响得到粗略曲线后,记开始测量的时刻为0,在测量总时间0到T内求平均值,因此需要计算高程在这段时间的积分再除以T得到平均值,对于积分的求法我们采用复合柯特斯公式进行计算,在0到T内每隔T/2k秒测量一次(0与T时刻各测一次),处理之后一共测得2k+1个时间点的高程值,并将其依次记为如下形式的关于变量t的函数,
将其从0到T平均分为2(k-2)个子区间,则每个子区间也被四等分,利用柯特斯复合求积公式可以近似算出此函数在区间0到T上的积分为。
那么在该区间的平均值即为。
这样,通过测2~3个数据,用科斯特复合求积公式可以精确表示这个区间精确的水深数据,在某一水面区域多次测量和处理后就可以根据这些点得到一个水深变化曲线。
(5)在VB测控软件的开发方面:采用VB编程语言解决实时监测,对水深数据影响因素的处理及数据库系统的访问问题。
(6)通过3次样条插值函数得到精准水深变化曲线:通过学习计算方法,我们了解到可以通过3次样条插值函数的方法求一系列中间点的函数值。令
这样即可根据各区间的函数求中间点的函数值,可以不用测太多的点也能绘制较精确的水深变化曲线。我们将会把这些计算方法通过编程变成VB的计算机语言,实现实时计算,精准高效。
3 监测系统基本原理
接收换能器和发射换能器以同等的高度和俯角分别安装在航道两侧的开口处,主波束指向航道底部中心。为精确测定航道的水深H,只需测出换能器到海面的水深δ和被监测点航道水深H1,根据公式:H=H1+δ,即可得到航道的即时水深,由射线声学及三角函数关系,发射换能器生成的超声波经海底反射出的所有声传播路径中,入射到航道底部中心位置声线的声程最短,它是最先到达接收换能器的。所以被监测点水深值就可以计算出来,而后通过GPS技术与水声信号检测技术,能够测得海底反射波传输时间t,算出发射点水底的距离,直接用传感器测得换能器到海面的水深,并用柯特斯复合求积公式的计算方法来消除浪的影响。用3次样条插值函数的方法进一步提高δ的测量精度,得到精准曲线,从而对实测水深参数进行修正。
4 无人机平台的改进和优化
将碳纤维复合材料和玻璃钢用于无人机,重量轻且强度大,无人机尾部安装的动力装置采用性能稳定的推力螺旋桨和航空发动机,无人机底部装上较大的浮板以增大接触面积,减小压强,这样可以更好地停留在水面或滩涂淤地上。
5 结语
目前随着无人机制造业的飞速发展,无人机的运用变得非常普及,在城市交通监管,道路和公共场合泊车治理,无人机测绘、航拍等方面应用广泛,无人机能高效地监控大片区域,而且受地形情况约束小、能耗小、小巧灵活、操作简单,易于普及。将无人机搭载其他监测系统用于泥沙淤积监测,是代替以往船测的最可行方法。物联网系统将互联网与多种传感器结合,数据采集和传输范围广,及时准确,信息便于记录与储存,是信息化时代泥沙淤积监测的必然趋势。两者的结合推动了泥沙淤积监测技术向自动化、高效化和经济化发展。
[参考文献]
[1]李国英,我国主要江河泥沙淤积情况及治理措施[J].水利水电技术,1997(4):2-6.
[2]吴建华,李红祥,文元桥.航道水深实时监控系统的原理及实现方法[J].航海工程,2009(3):153-156.
[3]楊建.双基地声呐的港口航道水深实时监测技术研究[J].中国水运,2014(6):48-49.
[4]黄建元.计算方法[M].南京:河海大学出版社,2004.
