基于ANSYSWORKBENCH的带电作业机械臂模态探究
陈柏希 段绍全 王斐宏 蔡文辉

摘 要:在带电作业姿态下,机械臂是配电网作业机械的主要执行者,机械臂的性能直接决定了机器人工作质量与效率,开展工作的可靠性等。本文借助Pro软件或Engineer软件,建设了在两种典型位姿下机械臂的实体模型,运用ANSYSWORKBENCH软件,设定为预荷载状况,对不同位姿下结构静力学的特性,其模态特征等开展分析。在模态分析结果基础上,实施动力学前馈补偿,自主控制机械臂的振动,抑制其工作过程内的振动现象,确保工作开展效率与质量。
关键词:ANSYSWORKBENCH;机械臂;振动抑制;模态分析
自经济全球化发展,人们对电力供应提出了更高的要求。在电力系统研究中,带电作业属于重要领域,其作业标准与质量直接关系着国家供电技术与供电实力。就实际情况而言,人工带电作业本身困难较大,却存在着较大的局限性。此方面机器人的开发与研究十分有必要[1]。自20世纪80年代中期开始,国外很多国家开始了带电作业机器人的研究,走在前沿的当属日本、美国、西班牙与加拿大。我国是20世纪90年代才开始的相关研究,但经过短短的几年,已经取得了较大的研究成果。
有限元分析法在近代工程内得到了广泛的应用,主要集中进行数值模拟,可靠性比较明显。本文主要选择的是有限元ANSYSWORKBENCH软件开展分析,深入剖析机械臂整体结构[2]。选择最大水平伸展、最大垂直伸展位姿,开展ANSYSWORKBENCH分析。在分析试验过程中,综合考虑机械臂的实际持重情况,并施加预荷载。通过分析机械臂模态仿真,获得两种典型位姿下,机械臂的6节模态振型。在仿真结果基础上,探索抑制机械臂振动的有效措施——动力学前馈补偿。
作为带电作业下的主要执行机构,机械臂本身的性能直接影响着作业安全与质量。因此,对带电作业机械臂机械性能的分析,具有十分重要的现实意义。本文主要探讨的是ANSYSWORKBENCH软件下,带电作业机械臂模态,详细分析如下。
1 带电作业机械臂模态分析
1.1 有限元模型的建立
带电作业下的机械臂本身拥有6个自由度,其组成结构比较复杂。在进行模型建立过程中,需要结合等效刚度代换理论,处理具体的结构,并对其简化。笔者结合实际与文献资料,认为带电作业条件下的机械臂,其等效简化主要包含以下三点:
(1)可以将各种连接、各种配合简化,比如,可将齿轮、啮合简化,分解为轴与孔,通过将螺栓与键之间的连接简化,以此转换为面接触。
(2)可将螺纹与倒角的特征忽略掉,将电位器与相应的固定构件忽略掉,并将其构件与线路忽略掉。不仅如此,还可以将空特征、台特诊忽略掉,以此开展质量的等效分布。
(3)结合液压系统的特点,选择等效配重原理,有效简化马达、液压缸及管路。通过开展适当的简化,可建设最大水平伸展、最大垂直伸展典型姿态下的机械臂模型[3]。在最大水平伸展位姿下,大臂关节与肩部关节之间的角度可保持到60°,机械臂此刻的最大承重为45kg。在最大处置伸展位姿下,肩关节为俯仰姿态,角度为120°,此阶段机械臂最大的持重为82.0kg。
1.2 模态仿真
在开展机械臂仿真前,需要先定义材料属性,分析连接关节的类型。就机械臂上的各个构件,在对材料开展属性加载时,应当综合考虑建模过程中,结构的简化问题。就机械臂连轴部位、夹持手部位的材料,可选择不锈钢。关节通过面约束实现,综合考虑机械臂的结构特点。
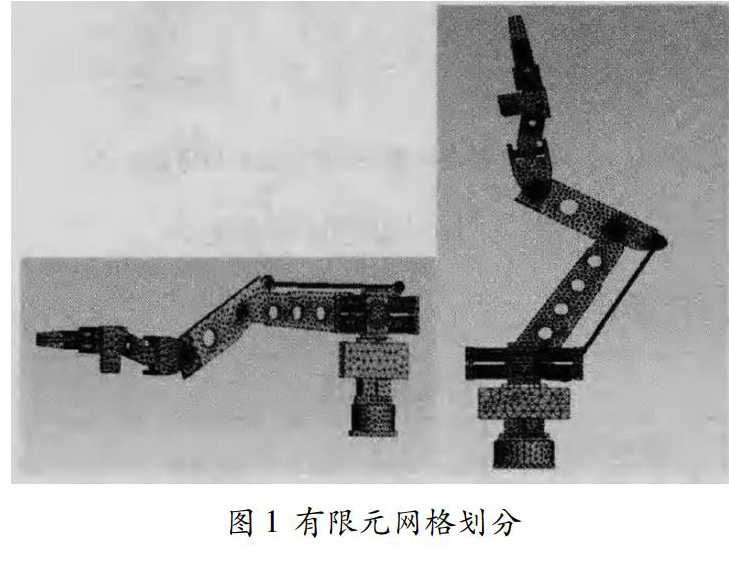
本文选择的是Bonded、No Separation两种面对机械臂各个构件进行约束,接触面进行约束。选择CFD模式,网格划分机械臂,其粗细均选择-50,划分连接轴部分。
本文就机械臂连轴部分与夹持手部分弹性模量选择的是193GPa,泊松比设置的为0.31,密度设置为7750kg/m3;其他部分为71GPa,0.33,2770kg/m3。网格划分节点数为62180,单元数为243508,其结构如下图1所示。
1.3 仿真结果的分析
(1)结构静力学,通过分析机械臂结构静力学方针,可获得机械臂最大水平伸展时的压强(99.24MPa),强度集中在肩关节、大臂关节连接位置。机械臂最大垂直伸展压强(4381MPa),强度集中在大臂关节与小臂关节连接位置。关节连接部位是不锈钢材料,最大压强极限为200MPa,比机械臂实际工况承受压强大很多,整体结构可满足工作要求[4]。手抓关节位置出现了最大位移,展现了关节变形情况与叠加情况。手抓关节最大位移为3.8874mm,规定最大伸展位移0.43246mm,已经超出了规定值。机械臂在开展基线工况时,要朝着水平方向伸展。
(2)模态仿真,通过分析下表,下表模态振型数据可得知。①在同一位置与姿势下,若在规定的承重范围内,是否需要增加机械臂的荷载,是否会对固有频率产生影响等问题,完全可以忽略,主要是因为外加荷载对机械臂自身的固有频率影响微乎其微。②不同位置与姿势下,在其持重范围内,机械臂自身固有频率变化,振型变化不大,随着阶数的增加,使得其变化也愈发明显。可得知机械臂属于装配体,其位置与姿势对固有频率、振型会产生相应的影响,但是若阶数处于较低标准时,其影响不大。
2 振动控制手段
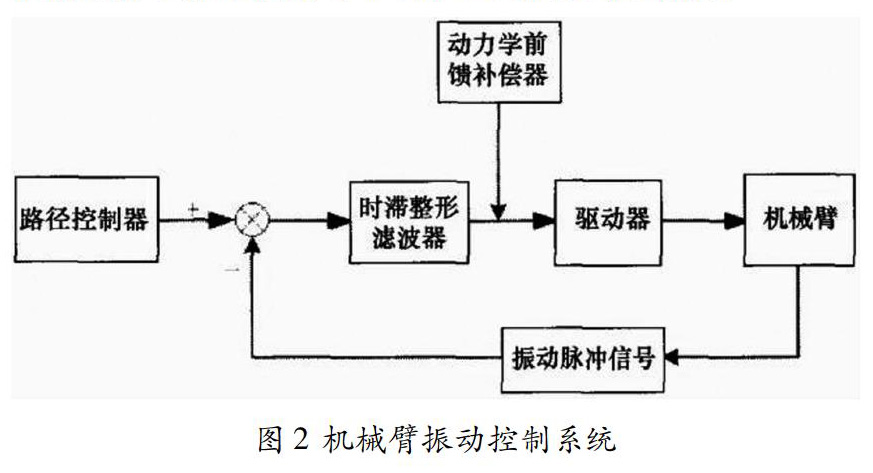
机械臂本身的1阶、2阶固有频率较低,自主控制实现所带来的影响更加明显。为有效抑制机械臂的振动,可选择动力学前馈的补偿控制方案。借助滞整形过滤器模块,动力学前馈的补偿器模块共同组成的振动控制系统。本身结构比较简单,可更好的实现。如下图2所示,整形器接收到的路径控制器信号,机械臂传导的振动脉冲信号,驱动器输出整形后的信号,能够同时为驱动系统提供动力学补偿。
3 结语
综上所述,本文是在等效刚度基础上,虚拟建模机械臂结构,可确保模态仿真的真实性与可靠性。使得连接与传统也实现了等效,但只能获得某一部分的整体情况。
通过建设机械臂的预荷载模态,可实现工作情况的真实模拟与仿真,确保数据的可靠性,结构的最优化,验证了该机械臂结构的合理性。
就机械臂的固有频率,对主动控制有显著的影响,可有效抑制振动,促使其高效工作。
可见,在ANSYSWORKBENCH软件基础上,开展带电作业机器人相关探究,切实可行。
參考文献:
[1]赵生传,赵玉良,李明,许崇新,赵阅群.带电作业机器人遥操作主从冗余机械臂研究[J].电工技术,2019(11):58-60.
[2]马孝林.高压带电作业机器人作业机械臂的ANSYSWORKBENCH设计及优化[D].山东建筑大学,2018,28(06):22-25+34.
[3]姜振廷,郑忠才,董旭.基于ANSYS WORKBENCH的六自由度机械臂有限元分析及结构优化[J].制造业自动化,2018,36(01):109-110+123.
[4]李健,姜振廷,董旭.基于ANSYS WORKBENCH的带电作业机械臂模态分析及振动控制[J].制造业自动化,2018,36(01):48-51+65.
项目名称:配网带电作业智能机械臂关键技术及应用研究(项目编号:050100KK52170012)
