基于嵌入式的3D打印机系统运动控制的研究
黄建锋 杨新 罗森林
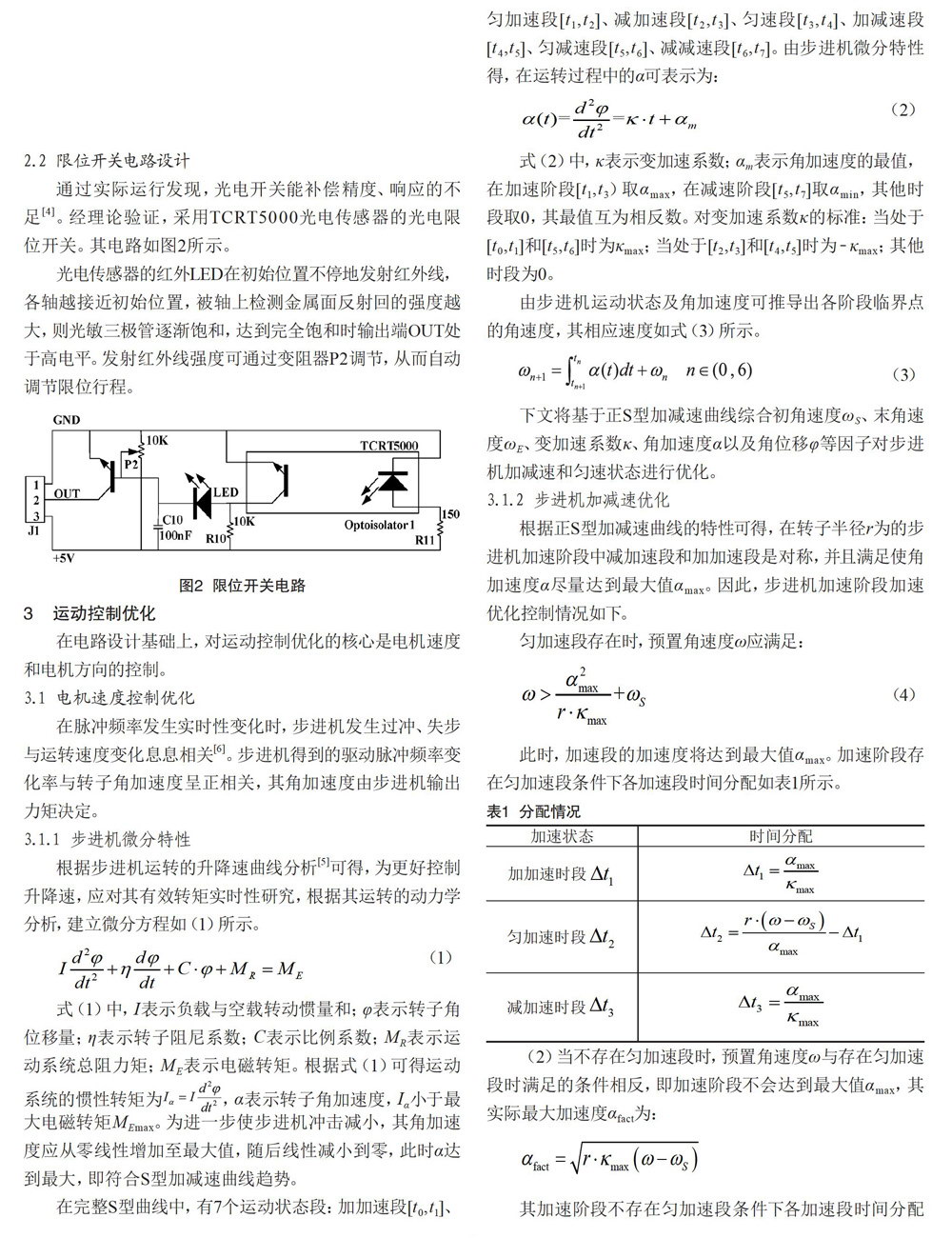
摘要:文章阐述了一种基于嵌入式并结合CPLD的3D打印机系统,用该系统实现最优的模拟信号采集、数据处理以及信号控制等方面。重点研究了该系统的运动控制系统,采用两相混合式步进机专用驱动NA4988来实现步进细分驱动,设计了步进机驱动电路;采用TCRT5000光电传感器精确控制XYZ轴行程,设计了限位开关电路。并对步进机的运转速度和运转方向进行优化设计,基于正s型加减速曲线对步进机加减速和匀速进行优化控制。解决打印精度和速度等根本性问题。
关键词:ARM;CPLD;3D打印机;步进电机;运动控制
随着社会的进步,3D打印机很快适应了社会的需求。对此,李轩等提出3D打印设备运动控制系统在产业化进程中的优化建议,采用限位开关来控制打印平台和喷头;骆国庆提出以ARM与CPLD设计多电机运动控制方案,采用CPLD处理器为步进机驱动控制的核心;李茂军等提出用步进机细分驱动去极大克服高频失步、低频震荡的缺点;郝亚冲等提出光电式开关能极大提高距离检测精度;杨超等提出利用s曲线算法来减小步进电机加减速转变时的震动。本文在前期研究的基础上重点研究运动控制,以此解决打印精度和速度等根本问题。
1.系统总体结构
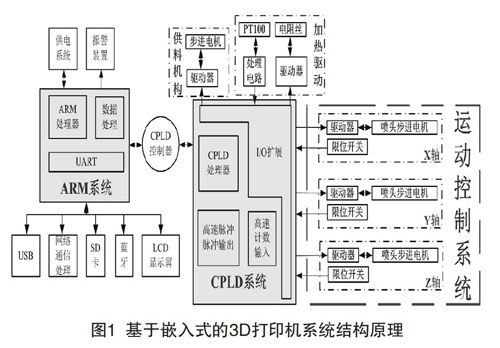
本文设计的3D打印机系统,主要部分是供电模块、网络通信處理模块等构成的ARM系统,辅助部分是运动XYZ轴驱动模块、加热驱动模块等构成的CPLD系统,两部分由CPLD控制器的并行接口相连接,既实现双向信息高效交换,也减少CPLD逻辑资源的消耗。其系统结构原理如图1所示。
上述ARM处理控制器采用STM32F407VGT6型号(STM32)的芯片,用于人机界面控制和运动控制计算,可与PC机直接相连来传递数据和控制设备;CPLD处理器采用EPMl270T14415型号的芯片(EPMl270),凭借1 270个逻辑单元突出低功耗、高速度等优势,并且外接步进电机驱动电路,以此实现XYZ轴步进电机联动速度和打印喷头走丝的时序控制。
2.运动控制系统电路设计
运动控制系统,其重要器件为步进电机,其XYZ三轴行程由限位开关控制。该系统电路主要设计步进机驱动和限位开关电路。
2.1步进机驱动设计
该系统采用17HS8401B系列的两相四线混合式42步进机,其带负载能力较强;其驱动芯片采用有过流保护和转换作用的微步细分驱动器A4988,斩波控制可选择混合衰减电流来提升步进精确度。
EPMl270控制A4988的3个端口(STEP,DIR,ENABLE)就可完全实现步进机运转。其中STEP端口输进微步细分信号,处理控制器根据工作频率给该端口输进上升沿的微步信号来控制步进机运转;DIR端口根据输入信号来控制步进机正转和反转,高电平正转,反之;ENABLE端口根据电平信号来控制步进机运转状况,低电平有效。通过对位置开关S1,S2,S3的调节来控制步进细分量。为克服步进机在运转过程中出现定位精度低等不足,从而采用1/16步进,即MS1,MS2,MS3端口均为高电平,步进机与A4988进行对应连接。
