基于计算机的视觉立体匹配算法研究
陈冬梅

摘要:计算机视觉技术主要是研究通过计算机技术来实现人的视觉功能的过程,计算机视觉研究的重点课题是立体匹配。双目视觉是和人体眼睛的视觉比较接近的,而且在实际应用中比较容易实现。文章对计算机视觉系统和立体匹配算法进行了分析,并且对双目视觉的视觉立体匹配算法进行了研究,通过相应的计算机算法对双目视觉立体匹配进行实现,具有-.一定的研究意义。
关键词:双目视觉;匹配算法;计算机视觉;立体匹配;相位一致性
1.计算机视觉系统分析研究
1.1计算机视觉技术及双目立体视觉
计算机视觉是通过计算机技术实现对视觉信息处理的整个过程,是一门新的学科。视觉是人们认知事物的重要途径,视觉是人们对视觉信息获取、处理和存储的过程。随着计算机技术的发展,信号处理技术的应用,人们通过照相机来把实际的事物拍摄下来转变为数字信息,并通过计算机信号处理技术队获取的视觉信号进行处理。计算机视觉技术对图像的处理分为获取图像、特征抽象选取、事物识别及分类和对三维信息的理解。获取图像主要是通过摄像机和红外线等技术对周围视觉事物进行获取,并通过计算得到和真实事物相应的二维图像,二维图像主要是数字图像。计算机视觉系统的最基本的功能是数字图像的获取。可以看出计算机视觉研究最基本内容是三维场景距离信息的获取。在计算机被动测量距离方法中,有一种重要的距离感知技术叫作双目立体视觉。双目立体视觉技术是其他计算机视觉技术无法取代的一种技术,对双目立体视觉技术的研究在计算机视觉技术和工程应用方面都是非常重要的。
1.2计算机视觉理论框架
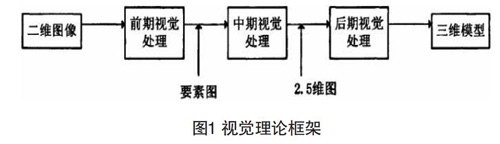
第一个视觉系统理论框架的提出是以信息处理为基础,综合了图像处理和神经生理学等研究内容而建立的。这个视觉系统理论框架是计算机视觉系统的基本框架,与计算机视觉技术有着密切的关系。视觉系统的研究是以信息处理为基础的,从理论层次、算法层次和硬件层次3个层次进行研究。计算机理论层次主要是表达系统各个部分计算的目的和方法,对视觉系统的输入和输出进行规定,输入作为二维图像,输出是以二维图像为基础建立起来的三维物体,视觉系统的目的就是对三维物体进行分析和识别,通过计算对二维物体位置和形状进行重新建立。算法层次对计算机规定的目标进行计算,算法和计算机表达有关,不同的表达可以通过不同的算法进行实现,在计算机理论的层次上,算法和表达比计算机理论的层次要低。硬件层次是通过硬件来实现算法的一种表达方法。计算机理论层次在计算机信息处理中时最高的层次,取决于计算机的本质是解决计算机的自身问题,不是取决于计算问题的计算机硬件。要更好地对计算机系统和框架进行理解最好的方法就是要区分3个不同的层次,计算机理论的含义和主要解决的问题是计算机的目的,表达算法含义和主要解决的问题是实现计算理论的方法和输入输出的表达,硬件的实现的含义和主要解决的问题是如何在物理上对表达和算法进行实现。计算机视觉处理的可以分为3个阶段,对视觉信息的处理过程从最初的二维图像的原始数据,到三维环境的表达。第一阶段基元图的构成,基元图是用来表示二维图像中的重要信息,主要是图像中亮度变化位置及其几何分布和组织结构,图像中每点的亮度值包括零交叉、斑点、端点和不连续点、边缘等。第二阶段2.5维图描述,在以观测者为中心的坐标中,表示可见表面的方向、深度值和不连续的轮廓,基元是局部表面朝向离观测者的距离深度上的不连续点表面朝向的不连续点。第三阶段三维模型表示,在以物体为中心的坐标系中,有由体积单元和面积单元构成的模块化多层次表示,描述形状及其空间组织形式,分层次组成若干三维模型,每个三维模型都是在几个轴线空间的基础上构成的,所有体积单元或面积形状基元都附着在轴线上。视觉理论框架图如图1所示。
2.基于计算机的视觉立体匹配算法研究
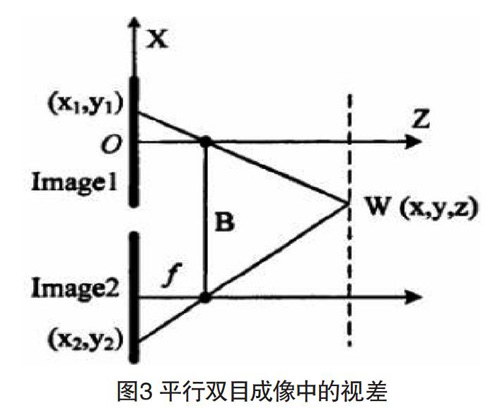
视觉立体匹配算法是基于人类视觉系统的一种计算机算法。立体匹配算法作为计算机立体视觉问题研究的重点,快速地实现图像对应点的匹配来获得视差图是当今研究的热点问题。立体视觉匹配算法根据基元匹配的不同可以分为相位匹配、区域匹配和特征匹配3种,其中区域匹配算法可以减少计算负担,区域匹配算法实时性高,应用前景广阔。计算机立体视觉通过对人的双眼进行模仿,在双眼的立体感知中获得信息,从摄像机拍摄的图像中获取物体的三维深度信息,这就是深度图的获取,把深度图经过处理得到三维空间信息数据,二维图像到三维空间实现转换。深度的获取在双目立体成像视觉系统中分为两步,首先在双目立体图像与图像之间建立点对点的对象关系,双目立体视觉算法研究的重点问题是解决对应点之间的匹配问题。其次以对应点之间的视差为依据对深度值进行计算。双目成像是获取同一场景中两幅不同的图像,两个单目成像模型构成一个双目成像模型。双目成像示意图如图2所示。系统的基线B是两个镜头中心的连接线,空间点w(z,y,z)作为世界坐标的值由(x1,y1)与(x2,y2)进行确定,如果摄像机的坐标位置和空间点w世界坐标的位置重合,图像平面和世界坐标轴xY的平面就是平行的。如果两个摄像机在坐标系统中的原点不同但是它们的光轴平行,那么双目成像计算人们可以看图3所示,图3表示的是两个摄像头连线在平台xY的示意。
立体视觉的成像过程是成像的逆过程,具有一定的不确定性。大量的数据信息在从三维影像向二维图像进行投影的过程会出现丢失的现象,所以视觉系统要通过自然的约束条件才能保证获取正确的解。这些约束条件在减少匹配的计算量方面可以提供有利的帮助。针对基于区域匹配快速算法,还可以应用基于视差梯度的匹配算法,这种匹配算法应用较大的搜索范围在边缘的特征点上进行搜索,采用视差梯度在非边缘区减少搜索范围。应用计算机视觉立体匹配算法可以减少成像匹配时间,大大提高了工作效率。计算机立体匹配算法中特征点的提取是算法的关键问题,今后的研究方向重点是对有效特征点提取方法的研究。
3.结语
基于计算机的视觉立体匹配算法研究是一项具有实际研究价值的课题,视觉立体匹配算法研究具有重要的意义。双目立体视觉技术具有广闊的应用前景,将成为工业和生物领域的关键性技术。
