基于正交实验的工业机器人轨迹精度检测
李斌 李梦奇 王蒙宽 梁睿

摘?要:工业机器人轨迹精度在机器人性能属于较为重要的参数指标,用于工艺加工的工业机器人工厂在轨迹精度与重复精度方面要求极高。基于Radian激光跟踪仪的高精度测量平台,针对机器人的轨迹速度特性测试实验进行正交试验设计,实验结果表明:在忽略其他因素的情况下,温度、负载、速度3因素中对于机器人轨迹速度特性影响最大的是负载因素。
关键词:正交试验;轨迹速度特性;轨迹精度;激光跟踪仪
中图分类号:TP242.2?文献标识码:B
随着高薪技术发展,机器人被广泛应用于医疗、国防、航天等行业。工业机器人轨迹精度成为衡量机器人工作性能的一大重要指标[1-3]。因此对机器人的轨迹精度影响因素进行研究是有必要的。当下机器人的精度已达到一个较高的水准,想要提高精度,使用精度高、数据稳、测量广的激光跟踪仪进行正交实验研究机器人的轨迹精度影响因素,获取的实验结果真实性高[4-5]。
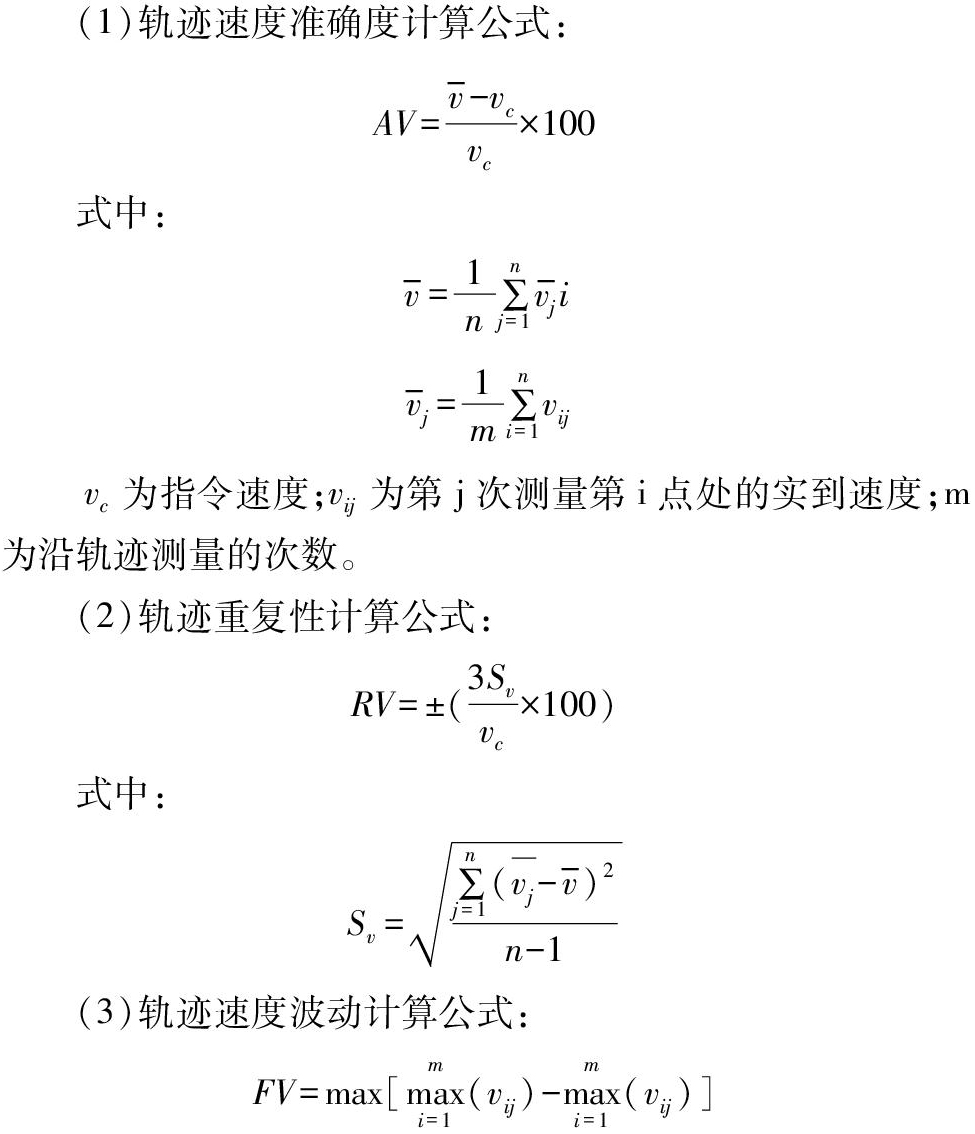
1 轨迹速度特性(RTp)
根据国标GB/T 12624-2103的要求,我们对机器人的轨迹特性进行检测[6]。轨迹特性(1)轨迹速度准确度(AV):表示指令速度与沿轨迹进行n次重复测量所获取的实到速度平均值之差,表达时我们采用指令速度百分比。(2)轨迹速度重复性(RV):表示对于同一指令速度所得实到速度的一致程度。(3)轨迹速度波动(FV):是指再现一种指令的过程中速度的最大变化量。
2 Radian激光跟踪仪工作原理
Radian激光跟踪仪采用的是API最新的绝对距离测量技术(ADM-MaxxTM)。ADM是一种通过时间计算距离的测量方式,得到靶球中心的位置也是通过测量两个角度AZ角和EZ角以及一个球半径距离。激光头射出两道激光,一道激光用于做参考光线,另一道则通过靶球反射回仪器,然后和参考光发生干涉,产生干涉距离。利用激光波长稳定的特性,激光跟踪仪可以精准的测量出任意一个空间点的坐标。而API绝对测距系统让跟踪仪在断光时能快速地获得靶球的位置,不断地跟踪靶球的位置。再将实时的数据传输到计算机主机和SA软件中,SA软件将这些数据导入到用户定义的测量坐标系中,比较数据后测出机器人的误差值[7]。
3 试验过程
3.1 轨迹速度特性测试
根据Radian激光跟踪仪轨迹速度特性测试要求,在新工件坐标系中,机器人以直线方式运动,编写机器人指令使机器人在100%、50%、10%速度和100%、50%、10%的负载下走如下轨迹:首先将机器人定位于P4点,接着运动到P2点并驻留3000ms给予激光跟踪仪足够的识别时间,再返回到P4点继续驻留3000ms,如此循环10次以上。
3.2 Radian激光跟踪仪正交测试实验设置
3.2.1 确定实验因素与水平
在机器人在不同的温度下进行测试,选取以下温度:20℃、25℃、30℃,以及10%、50%、100%的负载与运行10%、50%、100%速度,以轨迹P4至P2至P4,循环测试10次以上。
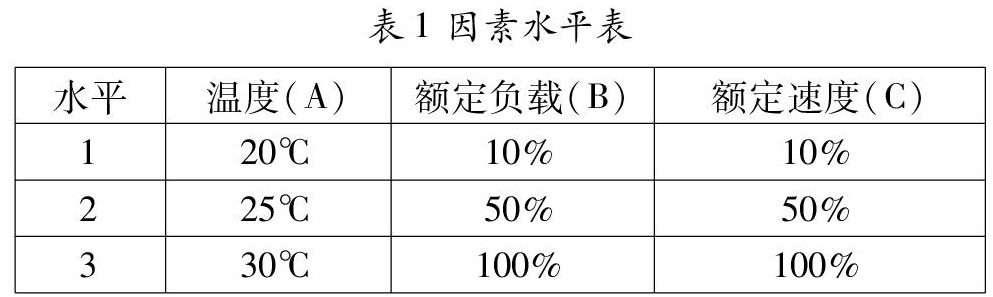
3.2.2 制作因素水平表
由于在实际考察问题中因素往往较多,每个因素水平较多,若使用全面实验法,虽然结果较为准确但是实验次数太多费时费力。此时我们选取正交试验方法,制作因素水平表1。
3.2.3 选取正交表
在本实验中的因素有3个水平,因此需要选用Ln(3m)型正交表,且有本实验包含3个因素,并不考虑交互作用,所以要选一张m>3的表,而L9(34)是满足条件的最小正交表,因此我们选用此表[8]。
3.2.4 设计表头
由于本实验不考虑因素间的交互作用,将各因素分别放置在正交表L9(34)上方,每个因素随机排布,不同因素各自占取一列,从而设计出表头。
3.2.5明确检测方案
正交表中的个列填写的数值1、2、3代表着该列因素在该试验中的不同水平,这样正交表每一行将对应一种实验情况,其中的空格列队实验无影响,由此的检测方案如表2。
4 轨迹速度测试结果分析
上图为20℃下,机器人以10%负载,10%V、50%V和100%V运动所测得的轨迹速度度特性如图。
通过表3可以看出,对于机器人精度影响最大的因素是B负载因素,其次是A温度因素,最后是速度因素,综上分析最优精度方案为A3B1C1,最差精度状态为A2B3C3。
5 结论
本实验针对10KG川崎机器人的轨迹速度特性测试过程进行正交试验设计,在温度、负载、速度3个因素与3个水平的实验条件下,测得不同的状态下工业机器的轨迹速度特性,并通过分析获得如下结论:
(1)在温度、负载、速度3个因素中对于机器人轨迹速度特性影响最大的为负载因素,因此在使用工业机器人时负载最好不要超过额定负载,否则精度将受大幅影响。
(2)本实验通过正交试验获得最优精度状态为30℃下,10%L与10%V状态下,这说明机器人在稍高温度下运动状态更好,反应更灵敏。
参考文献:
[1]赛迪智库机器人产业形势分析课题组.2019年中国机器人产业发展形势展望[N].中国计算机报,2019-03-25(012).
[2]Judd R P,Knasinski A B.A technique to calibrate industrial robots with experimental verification[J].IEEE Transactions on Robotics and Automation,1990,6(1):20-30.
[3]Renders J M Rossignol E,Becquet M,et al.Kinematic calibration and geometrical parameter identification for robots[J].Robotics & Automation IEEE Transactions on,1991,7(6):721-732.
[4]Dennis B J E,Schnabel R I.Numerical Methods for Unconstrained Optimization and Nonlinear Equations[M].Prentice-Hall,2009.
[5]Gong C Yuan J,Ni J.Nongeometric error identification and compensation for robotic system by inverse calibration[J].International Journal of Machine Tools and Manufacture,2000,40(14):2119-2137.
[6]王魯平.串联机器人多误差因素影响下定位精度分析及其误差补偿[D].合肥工业大学,2015.
[7]何晓煦,田威,曾远帆,等.面向飞机装配的机器人定位误差和残差补偿[J].航空学报,2016(04):292-302.
[8]钱小辉,马骁妍,秦中华,侯少静,徐美杭,张鹏,朱自安.基于正交试验的玻璃壳热应力影响因素分析[J/OL].机械工程学报,1-8[2019-06-29].
