高速公路雾区智能电子诱导控制系统设计
【摘 要】 高速公路以高速、便捷、高流量及安全著称,一般发达国家高速公路的交通事故总数和死亡率只有普通公路的1/3到1/2,而据有关资料统计,我国高速公路上的事故发生率和死亡率却均大于普通公路。其中又因雾等恶劣天气的影响造成的事故就占事故总数的近1/4。为此,本文提出一种雾区智能电子诱导控制系统,将有助于降低雾天高速公路上的事故发生率,对交通管理部门及时进行交通管控提供有效的帮助,对减少社会经济和群众生命财产损失具有重要的意义。
(一)高速公路的雾区分析
雾是因为地面和近地大气迅速降温,大气中的水汽达到饱和状态, 凝结成小水滴晶,漂浮在大气中所形成的一种天气现象。雾迷漫在近地面的大气层中,能使视野变得迷糊不清,能见度降低,影响行驶中交通运输工具的安全,尤其是高速行驶车辆的安全。
区域性的浓雾发生虽然具有很强的随机性和突发性,但同时它也是有规律可循的。它具有区域性、季节性和时限性,尤其是在对公路的影响方面,浓雾的区域性特点表现得尤为突出。它经常发生在一些地势低洼、潮湿或公路两旁有水田等特殊地段。高速公路上因雾造成的交通事故大部分都发生在这些浓雾易发路段。所以在掌握了公路上雾害发生的规律和特点,重点对这些浓雾多发路段利用现代化科学技术,采取一定的预告和交通管制措施,减少封道的时间和次数、提高高速公路在雾天的通行能力以及提高高速公路运营的安全性、降低事故的发生的概率是完全可能的。
(二) 系统基本方案分析
目前国内外对局部区域性在突发浓雾发生以后,高速公路不封道同时又保证车辆安全行驶,提出各种解决方案,也进行了各种试验,采取的主要措施方案包括采取能见度仪,对雾区形成进行智能侦测;车辆速度、流量侦测,依靠地线圈式的车辆控制器进行实时统计;灯光照明和诱导,在浓雾高发区域架设照明设备,增加雾区的亮度。在路两侧安装灯光诱导标志,引导车辆在公路中间行进,防止驶出公路等。以上典型方案都是采用被动式诱导装置,虽然能有效的提示驾驶员进入雾区注意安全行驶,但是车辆在进入突发雾区时,只能通过观察雾区公路两侧的诱导标志,车辆不至于上撞路边护栏,由于浓雾的影响能见度低,司机不了解前方车辆的距离,盲目跟进极易造成车辆追尾事故发生, 因此在能见度低于100米时大部分高速公路管理者只有采取封道措施。
为解决局部地区发生的团雾、山区和海边发生的突发浓雾以后车辆可以在不封道的情况下安全行驶,需要结合现代多种监控、探测技术,对驶入雾区的车辆作为移动物体进行自动识别和诱导,加强对局部区域性的突发浓雾恶劣天气对高速公路交通流量管理和控制。
本雾区智能电子诱导控制系统是高速公路雾区监控总体系统的核心部分,并合理地布设在高速公路浓雾易发路段,从而实现对多雾区路段交通情况进行监视;根据外场检测设备及时发现出现雾气情况,进行交通诱导和警示、速度限制,保障行车安全;有效的克服雾气对高速公路交通的影响,减少封道时间和次数。
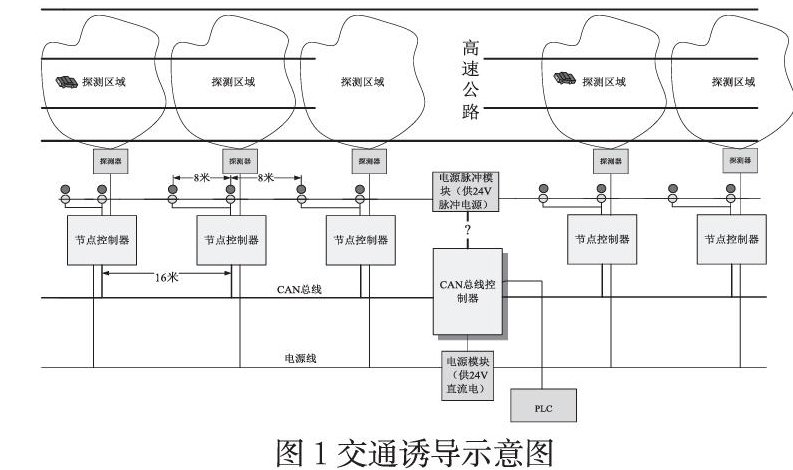
(三)系统的具体结构
系统基于现场总线(CAN-BUS)对2000米沿线各个探测“节点控制器”进行组网,并由“CAN总线控制器”控制,该控制器通过现场总线CAN-BUS与每隔16米的铺设的“节点控制器”通信(“节点控制器”来检测雾区路段车辆的流量、车速、道路占有率等运行数据),每个“节点控制器”同时控制每隔8米铺设的二个红/黄双色灯的颜色和闪烁,以诱导后续车辆前行和限速,黄灯路段表示汽车可以正常前行,红灯闪烁路段提示后续车辆减速慢行,保持车距;“CAN总线控制器”同时向上层监控中心发送沿线车辆探测和指示灯等的信息。
车辆进入雾区范围前即被安装在公路路肩侧的“节点控制器”跟踪探测。为使“节点控制器”保持连续跟踪,“节点控制器”内安装一台微波车辆探测器。“节点控制器”可以对车速1-80公里速度做出迅速反映,输出车辆移动信号,信号触发驱动模块,启动外部的灯光诱导标志,让灯光诱导标志发出诱导和警告燈光。安全诱导标志的灯光设定有四种距离,根据需要可以在70米、80米、96米、112米间调节,在车辆运行时设定在车后的诱导标志距离始终保持不变,后驶入车辆只要不超越警告标志(红灯),跟随诱导标志(黄灯)行驶,就不会与前行车辆发生追尾。如后部车辆驶入车道,不论有无超越警告标志(红灯)诱导标志,其后设定的范围内红灯依然闪烁,提醒后面的车辆,注意保持安全车距。当车辆进入雾区后,车辆行驶方向两侧的诱导灯全程以设定为黄色,车辆行驶通过(即路肩一侧),“节点控制器”检测到有车辆通过时,“节点控制器”所在的一组诱导标志灯即显示为红色闪烁,以提示后方的车辆。当车辆通过第5(预先设定)组“节点控制器”时,该组的节点检测器探测到车辆通过,此时,第1组处的诱导灯重新变为黄色,如此,即行驶车辆后方70米的区域为红色闪烁区域,从而达到警示后方车辆,控制车距的效果。在雾区路段设置广播系统,当“节点控制器”检测到车距过近或车速过快时,广播系统可以提示司机减慢车速,注意前方车辆,保持车距,谨防追尾。
【参考文献】
[1] 高速公路智能雾区诱导方案设计探析.彭雯莲.《中国交通信息化》2016年 第9期
[2] 高速公路智能雾区预警诱导系统设计.刘爽阳.《中国交通信息化》2014年 第3期
[3] 纳黔高速公路雾区交通安全保障措施研究.周林福.《公路与汽运》2012年 第4期
作者简介:王为(65年8月),男,汉族,杭州,教师、讲师,大学,杭州职业技术学院(杭州下沙高教园区学源街68号),310018,通讯电路、智能控制
本文系2019级杭州职业技术学院校级科研课题《高速公路雾区智能电子诱导控制系统设计》,课题编号:ky201924
