高尚


摘 要:本文分析了智能汽车辅助驾驶系统的数据采集相关技术,指出了各类技术的适用性和优势,设计了超声波测距结合视觉信息采集的模式来进行避障,并研究了智能汽车避障行为,最后采用Carsim软件与Simulink联合仿真来模拟智能汽车跟车行为响应。模拟结果表明,其基本符合车辆行驶过程的避障要求,跟车速度控制良好,达到了预期目标。
关键词:智能汽车;辅助驾驶;避障策略;系统设计
中图分类号:U461.99文献标识码:A文章编号:1003-5168(2020)29-0099-04
Abstract: This paper analyzed the data collection related technologies of the intelligent vehicle assisted driving system, pointed out the applicability and advantages of various technologies, designed the mode of ultrasonic distance measurement combined with visual information collection to avoid obstacles, and studied the obstacle avoidance behavior of intelligent vehicles, finally used Carsim software and Simulink co-simulation to simulate the response of smart car following behavior. The simulation results show that it basically meets the obstacle avoidance requirements of the vehicle during driving, the following speed is well controlled, and the expected goal is achieved.
Keywords: intelligent vehicle;assistant driving;obstacle avoidance strategy;system design
汽車最早起源于欧洲,在人类发展历程中已有一百多年的历史。截至2019年底,我国登记在册的机动车数量已突破3亿辆,机动车驾驶人已达到3.9亿人。随着机动车的增加,其给人们生活带来一定的负面影响,如造成交通拥堵和交通事故等。在汽车驾驶过程中,驾驶员长期疲劳驾驶或者判断失误,很容易造成道路交通事故。
为了避免交通事故给人带来的损害,人们可以通过自行驾驶让汽车本身具有一定的主动操作,智能汽车这一概念被提出。最早期的智能汽车用于军事工业,随着技术的不断研发和成熟,其在民用方面也逐渐开始盛行。目前,智能汽车作为世界各国汽车工业未来发展的方向,成为一个新兴产业,不仅提高了人们出行质量,还提高了社会资源的利用率[1]。2009年,美国谷歌公司提出了无人汽车概念模型;2017年,美国众议院通过了无人汽车驾驶法案;2018年,美国加利福尼亚州通过了无人驾驶汽车上路行驶草案[2-4]。
1 智能汽车数据采集
1.1 传感器
在智能汽车研究过程中,传感器是一个重要的技术部件,目前已经开发出多种传感器,其被应用于智能汽车中,应用较为广泛的是超声波传感器、红外线传感器、激光雷达传感器等,对于智能汽车而言,选择合适的传感器非常重要[5]。
红外传感器是将红外信号转化为电量信号的探测性元件。自然界中只要有绝对温度的物体都会发出红外光,随着温度的变化,波长也会发生变化。因此,可以通过红外线传感器来探测物体发出的红外光波,对物体进行探测。其可以分为五种类型:辐射计,探测辐射和光谱;搜索跟踪系统,对被测对象进行搜索和跟踪定位;热成像系统,提供红外热辐射图像;红外线测距和通信;混合系统,由以上系统(至少两个)组合而成[6]。
本研究采用超声波传感器,假设超声波从发射出去到接收反射回来的信号所用的时间为t,超声波在当前环境中的传播速度为v,则障碍物目标距离车辆为d,相关计算公式如下:
当环境中的温度为T时,超声波在空气中的传播速度计算公式为:
式中,[v0]为干燥空气中的声速,取331 m/s。
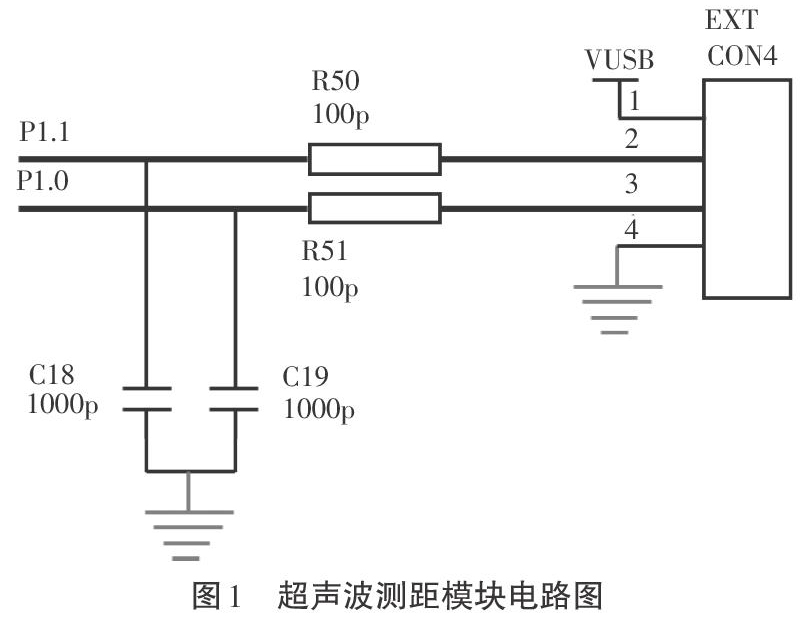
目前,超声波传感器作为测距元件被广泛应用到智能汽车障碍物探测中,相比其他类型传感器,在恶劣环境中仍然能够有效探测障碍物及相互距离,同时在产品经济性上具有较好的优势。本文采用的超声波测距传感器模块电路图如图1所示。
长期应用表明,该模块表现出稳定性好、测距精度高、盲区小的优势,测距原理如下:利用IO口TRIG触发测距,高电平信号不低于10 μs;模块自动发射8个40 kHz方波,并监测发射方波是否有返回;输出一个高电平,记录该高电平持续时间,该时间为超声波发射到接收返回信号的时间;一个控制口发射出一个高电平,同时接收口等待接收,在发射口输出时,定时器打开,记录测距时间,方可计算出距离。
在利用超声波传感器测距的过程中,仍然存在一定的盲区,当障碍物处于盲区时,可能无法准确探测,造成汽车与障碍物相互碰撞。因此,在安装超声波传感器的过程中,要尽量避免或者降低探测盲区的出现,从而降低探测盲区造成汽车与障碍物碰撞的可能。
1.2 数据采集
在智能汽车行驶过程中,数据采集是一个必备的环节,将收集的数据处理后反馈给汽车相应的计算分析中心,这保证了智能汽车能在行驶过程中不断修正轨迹,避免碰撞,顺利到达目的地。本研究选用3个传感器,分别安装在汽车的前后端的左、中、右三个部位,分别用于探测汽车左前方、正前方、右前方三个方向上的障碍物信息以及车辆后方与其他车辆的距离信息,以便更好地收集车辆周围信息,给车辆提供更加详尽的避障保障。
图像信息采集目前主要采用摄像机、数码相机拍摄等直接视觉信息采集方式。本研究采用视觉传感器来直接获知车辆在行驶过程中的道路信息,并对路面行驶过程障碍物进行准确获知,这就需要对采集的信息进行进一步处理分析。
1.3 图像处理
在图像采集過程中,由于采集的图像可能产生模糊、噪声大的情况,为了保障获取信息的准确性,提高视觉系统判断出障碍物信息的真实性,人们需要从图像信息中提取障碍物信息并进行数学模型分析,以便计算出障碍物信息,给智能汽车提供良好的避障路径。近年来,国内外学者提出了多种方法,如光流法、分割法、帧间差分法等算法。
在智能汽车行驶过程中,本文采用的视觉传感器可以采集环境信息,提取障碍物信息。以纸箱模型为例,通过图像灰度变化处理、图像滤波及形态学运算分析,将障碍物纸箱信息进行充分提取,具体操作流程如图2所示。
图像处理结果如图3所示。首先,在运动过程中探测到原始图像,如图3(a)所示,由于探测过程中车辆处于运动状态,因此探测图像显得较为模糊;对图像进行灰度处理,处理后的图像如图3(b)所示,灰度图像中存在一定的噪声干扰;将获得的灰度图进行滤波处理,得到较为清晰的图像,如图3(c)所示;然后进行形态学运算分析,得到“腐蚀”图像,如图3(d)所示。最终对图像进行充填,得到障碍物信息图像,如图4所示。
2 避障措施策略
2.1 多传感器融合
避障问题一直是智能汽车研究的重点工作,目前应用较多的是利用多传感器来收集信息,然后在时间和空间上进行互补,从而更为准确地探测出障碍物。经验分析表明,仅仅依靠一个传感器来获知信息并提供给智能汽车处理中心来进行决策,可靠性较差,而采用多个传感器则很好地解决了这一问题。目前,多个传感器融合的结构有集中型、分散型、混合型等。
集中型由信息处理中心对各传感器获取的信息进行分析,要求传感器获取的信道容量较大,能对许多传感器传输的信息进行同时分析处理。
分散型信息处理则需要首先对每一个传感器获取的信息进行预处理,然后将预处理的信息压缩后统一传输到信息处理中心。预处理过程则起着首先进行分析处理、降低信息处理中心信道容量的目的,但其间可能会丢失掉一部分重要信息,造成后期信息处理中心处理成果融合变差。因此,该类结构适合于远距离配置传感器系统并且信息获取保真度较高的情况,结构如图5所示。
混合型信息处理结构为集中型和分散型组合,这种结构既具有信息集中处理步骤,又具有分散型信息处理过程,使得各个传感器采集的信息能够充分被收集和利用,可以得到良好的处理结果。因此,混合型相对而言具有更好的结构优势,但其处理系统较为庞大。
2.2 超声波与视觉融合
智能汽车避障的关键在于如何准确获知障碍物位置,仅依靠视觉传感器进行信息采集,容易受到外界光线干扰,造成信息采集不完整,从而影响处理效果。而超声波测距可以在相对恶劣的环境下正常运行。总体来看,采用单一的传感器收集信息可能产生信息收集的不完整性。本研究利用超声波传感器和视觉信息处理两者的优点,将两种技术进行融合,即采用视觉摄像头和超声波传感器两种传感器进行信息采集,然后进行融合处理,利用超声波传感器探测障碍物距离,融合获取障碍物位置信息,探测出障碍物基本特征,再将超声波传感器探测到的距离作为模糊逻辑输入,以智能汽车避障行为作为对象进行输出,达到最佳的智能汽车避障效果。
2.3 智能汽车避障行为
本文将智能汽车避障行为分为三种类型,即直奔目标、直接避让和紧急制动。
2.3.1 直奔目标。直奔目标是指智能汽车从出发点启动,在行驶途中会产生很多突发情况,为安全抵达目的地,其间需要采取不同的措施来进行应对。当智能汽车在平坦道路上行驶时,传感器感知到地面无障碍物,智能汽车会平稳前进,中途不需要采取任何躲避障碍物的措施。
2.3.2 直接避让。直接避障是指智能汽车行驶期间,前方道路出现障碍物阻碍了正常行驶,为了避免发生碰撞,其会采取绕过障碍物的方式进行前进。因此,在探测障碍物时,要有良好的传感器,做好信息处理并反馈给车辆控制系统。
2.3.3 紧急制动。紧急制动是指遇到突发性障碍物时,无法进行合理避让,只能采取紧急制动模式停止汽车前行,直到障碍物远离智能汽车。这种情况产生的概率远小于上述两者行为,但是如果事件发生后,智能汽车未做出紧急制动反应,则会造成很严重的损失。因此,在智能汽车避障设计中,紧急制动是不可或缺的。
3 智能汽车跟车策略
3.1 系统构建
自动跟车主要依赖环境探测、信息实时反馈和车速控制,其关键在于通过环境探测将结果反馈给汽车控制系统,以便确定合理的车速,使其与前后车保持良好的车距。环境感知期间,对智能汽车行驶过程的周围环境进行测探,智能汽车的传感器进行信息采集、处理后,将信息传输到汽车控制系统,然后结合当前状态来进行调整,以时刻与前后车保持安全距离。
3.2 跟车状态分析
当智能汽车前后方都无车辆行驶时,汽车行驶状态有加速状态、稳定跟车状态、减速跟车状态。若智能汽车与前方车辆距离较远,其处于加速状态;当智能汽车与前方车辆的距离到达安全距离边界时,其进入跟车状态;当前方车辆发生制动或减速时,智能汽车也开始减速,当与前方车辆距离拉大后,智能汽车开始加速,然后再次跟车。
3.3 车距控制系统
本文采用Carsim软件与Simulink联合仿真来分析模拟智能汽车对操作行为、路面的响应情况,设定汽车以100 km/h初速度行驶,汽车以80 km/h速度匀速行驶,模拟得到智能汽车跟车(前车)过程的速度变化响应曲线,如图6所示。智能汽车初始速度较大,当智能汽车采取减速措施,直到车速与前车速度相同时,两车的实际车距小于安全距离范围,此时智能汽车继续减速行驶,在时间为4 s左右时,前后两车实际距离逐渐变大,智能汽车车速开始逐渐提高,直到10 s左右时,智能汽车的速度与前方目标车速度逐渐保持一致,此刻前后两车之间的实际距离与当前速度下的安全距离也相同,那么接下来智能汽车将会保持当前速度向前行驶。
4 结语
本文选用了Carsim软件作为车辆仿真软件进行智能汽车跟车系统研究。仿真结果表明,本研究设计的系统可以满足智能汽车在不同状态下运行的安全跟车要求,实现车距的稳定保持,基本达到了预期设计效果。
参考文献:
[1]翟强,程洪,黄瑞,等.智能汽车中人工智能算法应用及其安全综述[J].电子科技大学学报,2020(4):490-498.
[2]王延宁.基于CMAC-PID的车道保持辅助系统控制策略研究[J].机床与液压,2020(12):48-54.
[3]江勇捷,蓝丽金.三维激光雷达在汽车辅助驾驶中的应用分析[J].数字技术与应用,2020(6):88-89.
[4]罗栩豪,王培,李绍华,等.汽车辅助驾驶系统动态目标检测方法[J].计算机工程,2018(1):311-316.
[5]马骏昭.侧向驾驶辅助系统发展现状及技术趋势[J].汽车实用技术,2020(14):20-23.
[6]于立萍,刘法胜.基于模糊推理的汽车辅助驾驶系统控制算法[J].计算机工程与应用,2007(7):221-223.
- 基于多源数据的档案知识问答服务研究
- 基于HanLP的档案智能检索系统研发与应用
- 档案信息化发展指数研究之构建方法
- 后疫情时代抗疫数字档案资源整合
- 20世纪50年代中国现代档案学发展中的“苏联因素”
- 档案治理多元主体角色分析及其协同创新探究
- 基于范式论视域的档案学科与档案职业主体动态性建构研究
- 档案学术评论及其价值
- 我国档案事业制度化发展现状及“十四五”时期政策思路研究*
- 密歇根大学网页资源归档实践研究及启示
- 论法律规制下的档案“销有据”特征
- 关于新修订《档案法》对地方同级综合档案馆法定监管的讨论
- 我最关注的《档案法》修订
- 依法行政,局馆分设后地方档案行政管理部门的当务之急与需补之课
- 话说档案(5):档案的“真”与“假”
- 新时代事业单位档案管理的思考
- 医院党务档案智慧型管理路径探析
- 电子化背景下病历档案管理的服务转型
- 大数据下医院人事档案利用初探
- 论高校创新创业档案建设的实然状态与应然指向
- 进入社会档案的民生新闻是记录抗疫的“史记”
- 红色档案经典在讲好中国故事坚定文化自信中的作用评析
- 美国国家档案与文件署发布数字保存框架等
- 精细化模式改进医院病案管理实证分析
- 对档案馆参与地方文献资料编纂的思考
- depictors
- depicts
- depletable
- deplete
- depleted
- depleter
- depleters
- depletes
- depleting
- depletion
- depletions
- depletive
- depletory
- deplorabilities
- deplorability
- deplorable
- deplorableness
- deplorablenesses
- deplorably
- deploration
- deplorations
- deplore
- deplored
- deplorer
- deplorers
- 在文书上签名
- 在文书上签名,押字
- 在文书上签署
- 在文书上草书签名或代签名
- 在文件、条约或凭证上签字
- 在文件或纪念品上亲笔写上自己的名字
- 在文件末尾签署
- 在文化上能承前启后、学术上很有造诣的读书人
- 在文学创作上大力提倡扶持正统作品
- 在文学艺术作品中表现出的境界
- 在文据上签字、画押
- 在文艺创作中所描绘的生活场景与表现的思想内容完全融合在一起
- 在斗争或竞赛中打败对方
- 在斗争或竞赛中被对方打败
- 在斯一举
- 在施
- 在旁侍奉
- 在旁说些冠冕堂皇的空话
- 在旁边听
- 在旁边观看的人
- 在旁边陪候
- 在旅途中
- 在旅途或仕途上辛苦忙碌
- 在无条件或条件很差的情况下创业
- 在旷野作战