李松 董雯雯 侯卓磊


【摘? 要】论文介绍了一种新型的装载机工作系统,其采用伺服电动缸代替现有液压油缸,该技术不仅解决现有装载机液压驱动系统所带来的系统复杂、传动效率低、整机振动大等问题,还可以精准快速控制工作装置,且对后续的新能源裝载机的研发具有重要的意义。
【Abstract】This paper introduces the new-type loader working system, which uses servo electric cylinder to replace the existing hydraulic cylinder. This technology not only solves the complex system, low transmission efficiency, high vibration of the whole machine and other problems caused by the existing hydraulic drive system of the loader, but also can accurately and quickly control the working device, and has important significance for the follow-up research and development of the new energy loader.
【关键词】装载机;工作系统;伺服电动缸
【Keywords】loader; working system; servo electric cylinder
【中图分类号】TH243? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?【文献标志码】A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?【文章编号】1673-1069(2020)09-0178-02
1 装载机工作系统现状及发展
装载机主要用于土壤、砂石、煤炭等散装物料的装卸、推运以及施工等作业,其广泛应用于各类施工场所。当前,装载机的工作系统主要由液压泵、液压阀组、液压油及相关管路等组成,通过机械能和液压能的相互转变驱动液压油缸做伸缩运动,实现动臂的举升、下降,铲斗的翻转。在目前的技术领域中,亦有通过角度传感器及控制模块等实现电液比例控制,无论是传统液压系统还是电液比例控制系统,由于液压系统本身的特点,存在液压管路连接复杂、易产生漏油、系统安装不方便以及传动效率低造成的能源浪费等问题,同时,液压系统引起装载机整机振动大、控制精度不高,导致装载机可靠性降低、能耗增加,使用成本高。
本文介绍一种新型基于伺服电动缸的装载机工作系统,具有响应速度快、工作效率高、能量利用率高等优点。
2 基于伺服电动缸的新型装载机工作系统方案
2.1 基于伺服电动缸的工作系统总体方案
本系统主要是通过操作电控手柄产生电比例信号输入整车控制器VCU,VCU与伺服电动缸控制模块通过CAN总线通讯,从而控制伺服电动缸的工作方向、速度和工作精度。由于伺服缸控制模块支持CAN通讯,能够实现工作装置的电子定位,完成任意位置记忆,实现自动回位及自动放平的逻辑控制功能,使装载机具有一定的智能化特性,从而减轻了操作者的体力劳动,同时,由于伺服电动缸噪音及振动很小,提高了整车作业时的可靠性和操纵性。各元件相关连接关系如图1所示。
2.2 系统的组成及工作原理
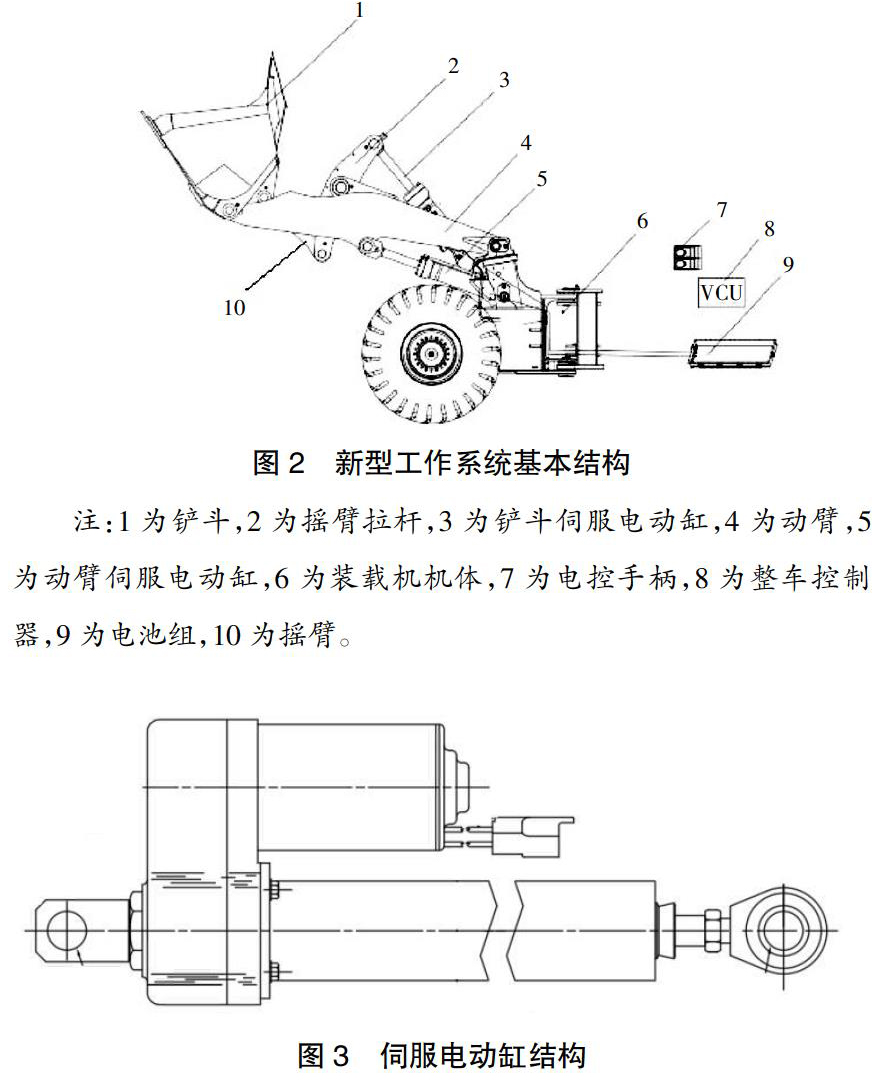
基于伺服电动缸的新型装载机工作系统基本结构如图2所示,伺服电动缸结构如图3所示。
注:1为铲斗,2为摇臂拉杆,3为铲斗伺服电动缸,4为动臂,5为动臂伺服电动缸,6为装载机机体,7为电控手柄,8为整车控制器,9为电池组,10为摇臂。
在现有装载机工作装置系统中以伺服电动缸替代液压油缸,电池组为电动缸供电,伺服电动缸包括行星滚柱丝杠和带动行星滚柱丝杠运转的伺服电机,伺服电机通过电缆接口连接电池组。伺服电机内部含有控制模块,控制模块与整车控制器CAN连接,整车控制器连接有电比例控制式的电控手柄。行星滚柱丝杠上安装有位置传感器,位置传感器可将位置信号输入控制模块,便于整车控制器根据实际的工况精确控制伺服电机,不再需要外接角度传感器,控制方便的同时,集成度也更高,简化了安装结构。同时,电动缸外侧外置限位机构(见图4),安装在丝杠上的限位块,用于实现装载机行程的精准控制和双重保护的极限控制。
一个完整的电动缸应包括动力控制机构、位置反馈机构、执行机构。动力控制机构包括电机及电机控制系统。位置反馈机构包括与电机轴同轴设置的磁感应传感器,磁感应传感器的输出信号送入电机控制系统。执行机构包括转动组件和平移组件,转动组件包括轴承室、丝杠、设置在轴承室内的两个压力轴承,丝杠的一端设置有外螺纹,其另一端与齿轮副中的一个齿轮轴同轴固连,其中部圆周侧面上设置与丝杠轴心方向垂直的限位轴台。限位轴台设置在轴承室内,两个轴承分别设置在限位轴台的轴向两边。平移组件包括限位座、设置在限位座内的执行杆、可与丝杠组合成滚珠丝杠副或滑动丝杠副的法兰。如果执行杆的伸出端没有被限制转动,则需要在执行杆的圆周侧面设置两个外凸的限位块。同时,在限位座上设置可供两个限位块沿轴向滑动的两个限位槽,此时限位座还需要设置两个用于密闭限位槽的盖板,实现电动缸的行程保护。
以铲斗伺服电动缸为例,电控手柄通过CAN总线和伺服电机通讯,电池组通过整车控制器发送指令给伺服电机供电,电控手柄控制伺服电机的运转,实现行星滚柱丝杠的启动、停止、伸出、缩回,使铲斗完成收斗和翻斗。同理,通过电控手柄可以实现动臂的举升和下降。
伺服电缸是将伺服电机与丝杠一体化设计的模块化产品,将伺服电机的旋转运动转换成直线运动,同时,将伺服电机最佳优点——将精确转速控制,精确转数控制,精确扭矩控制转变成精确速度控制,精确位置控制,精确推力控制,实现高精度直线运动。伺服电动缸噪音低,节能环保,高刚性,抗冲击力,超长寿命,操作维护简单。伺服电缸可以在恶劣环境下无故障,防护等级可以达到IP66,可以有效提高装载机的可靠性。
3 结论
①本文介绍的整个驱动系统采用电比例控制式的电控手柄,通过CAN总线信号传输实现伺服电动缸驱动和控制,使得系统效率提高,且系统在不提升时几乎不消耗能量。
②伺服电动缸具有工作行程与工作速度精确可控、可靠性高、不会产生漏油、系统安装方便的优点,采用行星滚柱丝杠进行运动转换,具有转换效率高、使用寿命长的优点。
③伺服电动缸能满足更大扭矩、更大推力的控制需求,运行噪音低,对环境无污染,制造成本低。伺服电动缸集成度高,方便整车安装。
④本系统为纯电控系统,对后续智能化、无人化、新能源装载机的研究有重要的意义。
【参考文献】
【1】邓琦.行星滚柱丝杠电动缸应用现状[J].船舶工程,2017(39):143-146.
【2】杨力夫.装载机工作装置电液比例控制系统[J].工程机械,2002(4):1-5.
【3】刘顺安,宫文斌.机器人化装载机工作装置数字电液比例控制系统[J].吉林大学自然科学学报,2000,30(3):30-34.
- 浅析苏式语文教学中学生核心素养的发展
- 关注生活:“为有源头活水来”
- 微课在高中语文教学中的应用策略探讨
- 也谈“和谐语文教学”
- 以儿童哲学绘本为船,扬语文核心素养之帆
- 学科教学中如何渗透诚信教育
- 在高职语文教学中如何渗透传统文化
- 多媒体在语文教学中应用的优势
- 多种方式激发兴趣采取措施学好语文
- “对话教学”在小学语文教学中的应用
- 小学语文课堂教学有效性的提高策略分析
- 有效指导低年级写话练习
- 对小学语文教材习作编排的思考
- 探寻古诗教学的“诗性”智慧
- 重新理解教育的本质
- “他山之石”激起课堂一池春水
- 浅析初中语文体验式阅读教学
- 基于核心素养导向的初中语文教学
- 初中语文教学中如何提高课堂教学有效性
- 功夫在课堂 巩固在课后
- 执教新教材的教学观和教法初探
- 小学语文低年级识字写字教材分析与教学指导思考
- 浅谈小学语文词语的教学
- 部编版三年级语文“语用型教学”措施分析
- 演奏好序曲 激发起情趣
- civilizations
- civilizatory
- civilize
- civilized
- civilizedness
- civilizedness'
- civilizednesses
- civilizedness's
- civilizee
- civilizer
- civilizers
- civilizes
- civilizing
- civillaw
- civil law
- civil liberties
- civilly
- civilness
- civilnesses
- civil right
- civil rights
- civilservant
- civil servant
- civil servants
- civilservice
- 恭请
- 恭请享用祭品吧
- 恭谒
- 恭谢
- 恭谦
- 恭谨
- 恭谨地承受
- 恭谨宽厚
- 恭谨执行
- 恭谨的样子
- 恭谨纯朴
- 恭谨而严肃
- 恭谨而戒惧
- 恭谨虔诚
- 恭谨记述
- 恭谨诚信
- 恭谨诚实
- 恭谨诚笃
- 恭谨谦和
- 恭谨谦抑
- 恭谨谦让
- 恭谨谨慎,小心翼翼
- 恭谨辞谢
- 恭谨遵守
- 恭贺