朱延枫 陈艳丽
摘 ?要 电动机的正反转控制是电工学理论及实验教学中的重要内容。Multisim 10是应用十分广泛的电工电子电路仿真软件。基于Multisim 10的电动机正反转控制电路的仿真分析可以避免实验受时间、空间的限制,同时减少对元件、人身的伤害,使学生熟悉实验过程,提高实验效率,开阔设计思路。仿真结果证明,该设计方法是正确的和可行的。
关键词 Multisim 10;电动机正反转控制电路;仿真电路;实验
中图分类号:TP391.9 ? ?文献标识码:B
文章编号:1671-489X(2019)14-0034-03
Abstract The control of electromotor positive-negative rotating is an?important content in electrics and its experiment. Multisim 10 is a useful simulation soft in electrics and electronic circuits. Simulation of electromotor positive-negative rotating control circuit based on Multisim 10 can not be limited by time and space. It can reduce the elements and personal injury. It can make the students be familiar with the experimental process, improve the effect of experiment and open the design ideas. The results of simulation proving this method are correct and feasible.
Key words Multisim 10; electromotor positive-negative rotating control circuit; simulation circuit; experiment
1 引言
就現代机床或其他生产机械而言,它们的运动部件大多是由电动机来带动的。因此,在生产过程中要对电动机进行自动控制,使生产机械各部件的动作按顺序进行,保证生产过程和加工工艺合乎预定要求[1]。
电动机的控制通常是各高校电工学理论与实验教学的一项重要内容。当前国内还较多地采用继电器、接触器及按钮等控制电器的继电接触控制系统来实现电动机的起动、停止、正反转、调速、制动及顺序控制。在理论课结束后会进行相关的实验或实训,并且在学生进入实验室进行实际操作之前,教师都会要求学生写预习报告以熟悉相关内容。但从多年的教学效果看,学生由于对接触器、继电器等控制器件接触很少,只是简单地写出实验目的、意义和原理,不能完全熟悉器件的连线及电路的运行过程,更不能清楚电路出现故障的原因及改正方法,因此达不到课前预习的目的。再有三相交流电的电压较高,因此,针对三相电动机正反转控制电路的相关实验和实训过程都存在一定的风险。此外,有些故障性实验,如负载短路、自锁现象等,都难以进行[2]。
随着社会的发展,计算机得到普及,各高校也可以为学生提供足够的计算机,并且各种能用于电路仿真的软件也不断地完善和更新,这些都为学生能更好、更直观地对电动机继电控制系统进行了解、设计提供了可能的方法。
2 Multisim 10简介
Multisim 10是知名的EDA软件EWB 5.0的升级版。Multisim 10继承了EWB软件界面形象直观、易学易用等突出优点,同时在功能和操作方面做了较大规模改动。Multi-sim 10具有如下基本功能:
1)为用户提供数量众多的现实器件和虚拟器件,分门别类地存放在18个元器件库中;
2)为用户提供了23种虚拟仪器仪表,包括电压表、电流表、数字万用表、函数信号发生器、功率表、双通道示波器、失真分析仪、泰克示波器等,完成仿真电路的参数及波形测试;
3)具有完备的性能分析手段,既可对模拟电路或数字电路分别进行仿真,也可进行数模混合仿真和射频电路的仿真;
4)具有完美的兼容能力,既可以打开先前版本的EWB和Multisim文件,也能打开Spice网络表文件、Orcard文件、Ulticap文件等[3]。
3 基于Multisim 10的电动机正反转控制电路的仿真
教学实践表明,Multisim在提高理论和实验教学质量、激发学生学习兴趣、培养学生工程实践和创新能力等方面有很大的促进作用。当前有许多关于Multisim的书籍,但其在电机控制电路中的应用几乎没有。这方面的文献也很少,文献[4-6]分别基于Multisim 10仿真软件对电动机正反转控制电路进行了仿真。
电动机正反转控制电路的核心元件为交流接触器,而Multisim 10中没有现成的交流接触器,但可以利用Multi-sim 10中的Coil_Relays、Timed_Contacts元件箱来实现交流接触器的功能。
文献[4]利用多触点继电器作为交流接触器,完成可以实现电动机“自锁”和“联锁”作用的仿真电路的设计,但控制电路的电源采用的是直流电源。
文献[5]利用复合按钮实现了“联锁”作用。
文献[6]利用延时继电器实现交流接触器的功能。
本文综合文献[4-6]中的仿真电路,采用多触点继电器实现交流接触器的功能,利用继电器本身的触点完成电路的“自锁”和“联锁”作用,整个电路中的所有元件均采用交流电源供电,具体设计如下。
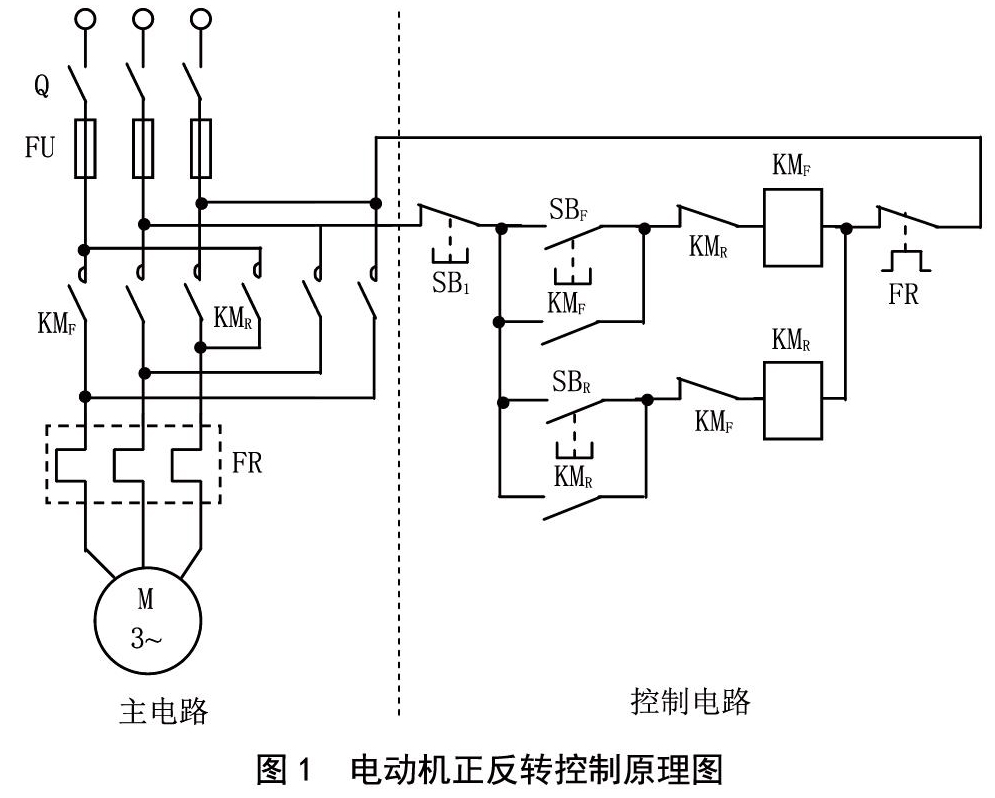
1)仿真电路的元器件介绍。图1为电动机正反转控制的原理图。电路分为主电路和控制电路两部分。下面介绍图1中的元器件所对应的Multisim 10的仿真元件。
三相交流电源取自Multisim 10的电源器件(Source)中的电源系列(Power_Sources)的Three_Phase_WYE,并将频率设置为50 Hz,相电压为220 V。
组合开关Q取自Multisim 10的机电类元件库(Elec-tro_Mechanical)中的附加触点开关(Supplementary_con-tacts)的3pst_SB。
Multisim 10中的保險丝规格不满足本次仿真电路的要求,因此未选。
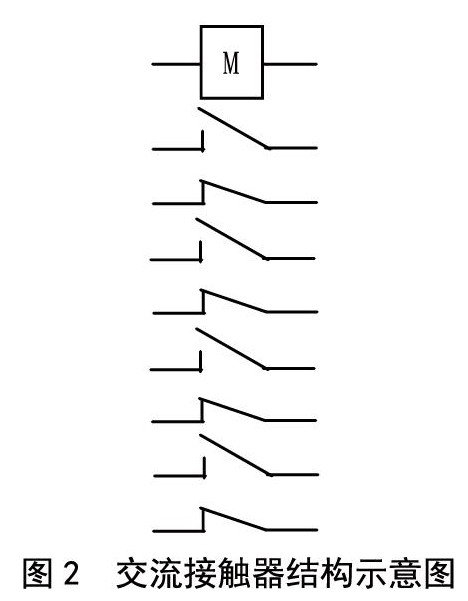
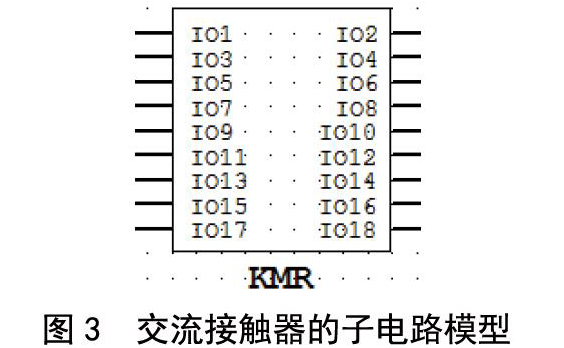
交流接触器取自Multisim 10的机电类元件库(Electro_Mechanical)中的线圈与继电器(Coil_Relays)系列中的Motor_4c。此继电器的结构如图2所示,包括一个线圈、四个常开触点、四个常闭触点。而从图1可以看出,每个交流接触器在主电路中需要三个常开触点。在控制电路中需要一个常开触点与起动按钮并联,实现电路的“自锁”功能;一个常闭触点与另一个交流接触器的线圈串联,实现电路的“联锁”功能。因此,图2所示的继电器的触点数满足电路的要求。由于它的输入/输出端子较多,因此可以利用Multisim 10的创建子电路的方法简化仿真电路,增加设计电路的可读性,如图3所示。
本电路通过热继电器(FR)实现对电路的过载保护。FR可以在Multisim 10的机电类元件库(Electro_Mecha-nical)中的线圈与继电器(Coil_Relays)系列中的热继电器(Thermal_ol_Relay)得到。根据电动机的额定电流约为108 A,确定FR的整定电流I=108×1.05×≈160 A[5]。
下面分析控制电路。控制电路为单相交流电路,因此,电源可以取自三相电源中的任意一相。正转起动按钮SBF、反转起动按钮SBR和停止按钮SB1可以取自Multi-sim 10的机电类元件库(Electro_Mechanical)中的附加触点开关(Supplementary_contacts)的SBST_NO__SB。正、反转交流接触器的线圈和常开、常闭触点前面已介绍。
将所选的仿真元器件按照图1所示原理图连接好,便得到如图4所示电动机正反转控制仿真电路模型。
2)仿真电路的工作过程。先将组合开关QF闭合,然后按下正转起动按钮SBF,此时正转线圈得电,则其在主电路中的三个触点(Io1-Io2,Io3-I04,Io5-Io6)闭合,电动机正转。同时,其在控制电路中的与SBF并联的常开触点(Io9-Io10)闭合,实现电路的“自锁”功能;常闭触点(Io11-Io12)断开,保证在电动机正转的时候,即使误按反转起动按钮SBR,反转接触器线圈也不得电,也即反转接触器不能工作,这就是电路的“联锁”功能。
如果此时要求电动机反转,则按下停止按钮SB1,由于正转线圈KMF断电,与反转线圈并联的联锁触点KMF闭合。然后按下反转起动按钮SBR,则反转接触器的线圈得电,反转交流接触器主触点(主电路中)闭合,即将接到三相电源的两根进线(1,3)对调,电动机反转。同时,与反转起动按钮SBR并联的常开触点闭合,实现“自锁”;与正转线圈串联的常闭触点断开,实现“联锁”(反转交流接触器的线圈、触点均在KMR子电路模块中,编号同正转交流接触器子电路模块)。
3)仿真结果分析。如图4所示,仿真电路中在电动机的每一相上都串联了一个交流电流表。按下正转起动按钮SBF,电动机正转,此时三个电流表的示数分别为108.676 A,108.676 A和104.951 A。如果断开SBF,由于“自锁”作用,此时三块电流表的示数并未发生变化,也即电动机仍然维持正转状态。按下停止按钮SB1,三块电流表的示数逐渐减少,接近零,说明电动机停止运行。按下反转起动按钮SBR,电动机反转,此时三块电流表的示数分别为108.676 A,108.676 A和104.951 A。
从仿真数据可知仿真结果与理论课的相关结论完全一致,因此,基于Multisim 10的电动机正反转控制电路的仿真分析方法是正确的、可行的。
4 结语
应用Multisim 10进行电动机正反转控制电路仿真,克服了由于学时、实验场地不足的缺点,使学生的实验、实训不受时间、空间的限制,在实际操作前充分了解器件的性能、电路的工作原理、常见的错误,这样可以在实际操作中大大减少对元器件和人身伤害事故的发生。最后,从创新型人才培养方面考虑,应用Multisim 10可以让学生自行完成一些实际电路的设计任务,从而使学生加深对所学知识的理解,开阔思路,为学生参加各类电子大赛打下良好基础。
参考文献
[1]秦曾煌.电工学[M].7版.北京:高等教育出版社,2009:287.
[2]黄培根,任清褒.Multisim10计算机虚拟仿真实验室[M].北京:电子工业出版社,2008:1-2.
[3]王廷才,陈昊.电工电子技术Multisim10仿真实验[M].北京:机械工业出版社,2011:1-2.
[4]贺利.基于Multisim10的电动机控制电路仿真设计与分析[J].实验室研究与探索,2015,34(5):79-82.
[5]万琰,谢海良.基于Multisim10的电机正反转控制电路的设计与仿真[J].漯河职业技术学院学报,2009,8(5):45-46.
[6]王晗.基于Multisim10的接触器仿真设计与实现[J].实验技术与管理,2010,27(3):82-84.
- 羽毛球特色学校发展模式与创新研究
- 警察体育与警务技能辨析
- 大学体育教育中拓展训练的作用
- 浅析警察体能训练的重要性
- 高职体育院校学生就创业指导课程建设调查报告
- 公安院校警察体育与警务技能双向发展对策
- “教”与“玩”是小学体育教学的智慧之花
- 现代警察体育擒拿格斗教材革新趋势探讨
- 体验经济视角下我国体育旅游产业发展的机遇、挑战与趋势
- 高校艺术设计专业网络教学模式初探
- 浅谈信息化手段在初中物理教育中的应用
- 高校经济管理实验教学的发展瓶颈及改进思考
- 安防监控系统防雷装置的重要性及措施探讨
- 浅谈智慧消防云平台
- 浅谈连续运行卫星定位服务系统的发展与教学应用
- 基于3D打印与逆向工程技术的项目教学
- 基于涡轮发电的汽车尾气能量回收系统设计
- 基于arduino单片机模块无人机动力测试试验台及控制软件研发
- 基于微处理器的太阳能电动车智能灯光系统设计
- 基于信息化技术的高校思想政治教育现代化建设研究
- 大数据时代网络文化对生活方式的影响研究
- 由“游戏”一词说开去
- 补体系统与肿瘤免疫关系的研究进展
- 殡葬文化背后日本国民的生死观
- 试论基于“互联网+”时代下博物馆宣传教育方略
- flow-chart's
- flow charts
- flow-diagram
- flow diagram
- flow-diagrams'
- flowed
- flower
- flowerbed
- flower bed
- flower beds
- flowered
- flowerers
- flowerful
- flowerier
- floweriest
- flowerily
- floweriness
- flowerinesses
- flowerlessness
- flower-like
- flowerlike
- flowerpot
- flowerpots
- flowers
- flowery
- 愤懑抑郁
- 愤懑的心情
- 愤抑
- 愤时嫉俗
- 愤毒
- 愤气
- 愤气填胸
- 愤气填膺
- 愤沮
- 愤泉秋沸
- 愤涛
- 愤溃
- 愤激
- 愤激不平之气
- 愤激地离开
- 愤激怨恨
- 愤激的样子
- 愤激而争吵
- 愤激而恳切
- 愤火
- 愤烈
- 愤然
- 愤然作色
- 愤然逃散
- 愤疾