王琳辉

摘 要:本文重点介绍了中高职学校电力拖动控制线路课程仿真实训系统。采用PLC和嵌入式MCGS組态软件,可以通过电脑动画仿真与实际线路联动来模拟电力拖动实训项目。与传统实训仿真相比,虚实结合、方便可靠、省时省力、效果逼真、界面友好。方便学生学习和掌握电力拖动控制线路的原理和安装。
关键词:PLC;MCGS;组态软件;电力拖动;仿真实训
【中图分类号】G【文献标识码】B【文章编号】1008-1216(2019)09B-0042-03
目前,中高职机电类、电气类专业均开设电力拖动基本控制线路这门实训课。在讲授电机控制线路原理时,教师普遍采用挂图或黑板画图讲授的方式。对于电路中电流走向,电器元器件的动作过程,学生很难理解与掌握。根据教学实际情况,在师生中进行了广泛的调研,利用PLC、触摸屏和MCGS组态软件设计开发了电力拖动实训及演示系统。该系统由上位机仿真软件、下位机控制部分和实训设备本体组成。上位机采用MCGS组态软件设计了所有电力拖动控制线路仿真动画,下位机采用PLC、触摸屏、接触器制作了电力拖动控制线路实训及演示装置。采用串口或以太网通讯把上位机与下位机连接起来,从而实现用电脑控制实训装置动作,并保证电脑中电力拖动控制线路动画与实训装置中电机动作过程联动,达到理实一体、“学中做,做中学”的目标。
一、系统总体设计
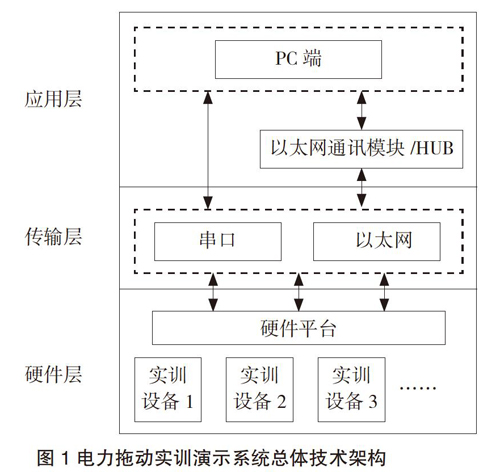
根据研究的设计要求,本文所研究的电力拖动实训演示系统总体技术架构如图1所示。
该系统硬件层包括PLC与人机界面、实训设备本体组成的人机交互式硬件平台,介于应用层和硬件层之间的传输层用于实现二者的信息交互和数据传输,主要有串口转RS485通讯、以太网通讯。教师或学生通过PC端软件实现与硬件层实训设备本体进行交互,从而实现线路动画仿真软件近程或远程与实训设备的联动。
二、 下位机设计
(一)实训设备本体设计
关于电气控制实训设备本体部分,目前市场上较成熟的两种方式是网孔板安装式和接插线式。这两种方式各有优缺点:网孔板式实训装置利于学生提高电气安装、操作的技能,但也存在着费时、耗材消耗大,不利于学生学习电路原理的缺点;接插线式实训装置采用带绝缘护套的香蕉插头、插线方式,具有安全、方便、快捷,利于快速学习电路原理的优点,但也存在着无法完成电气安装工艺实训的缺点。本研究设计的实训装置本体部分采用了网孔板、接插线相结合的方式,集这两种方式的优点于一身,左侧部分为接插线实训模块,右侧部分为网孔板实训模块,这两个模块均设计成可拆卸的结构,可以根据实训项目的不同,安装不同的模块。
(二)控制部分设计
下位机控制部分采用三菱FX2N-48MR PLC和TPC7062Ti MCGS触摸屏组成。主要有两种通讯与控制方式,用来实现电气实训设备的近程和远程控制。用RS485转串口电缆把PLC与装有仿真软件的电脑直接相连,这种情况适用于近距离通讯、联动。PLC通过编程口,利用串口通讯与触摸屏进行连接,触摸屏与互联网相连,利用连接互联网的PC机实现上位机仿真软件与下位机通讯,二者联动。
(三)电路设计
本设计结合电力拖动实训课内容,归纳出电机连续正转、电机正反转、电机降压启动、电机制动、电动机变频控制等几类电气线路主回路。
该研究基于人机交互技术,可以通过人机界面与PLC进行信息交互,实现线路仿真与设备联动功能。为了更加方便学生实训和教师教学演示,电力拖动线路实训用到的按钮、行程开关、热继电器辅助触点、线路动作反馈信号、传感器信号等输入信号接到PLC输入端,实现近端实训设备、实训线路控制、远端设备控制和状态监测。电气控制主回路中的交流接触器KM1~KM7线圈接PLC的Y0~Y6输出,用于电气故障设置的中间继电器KA1~KA9连接到PLC的Y7、Y10~Y17 。变频器E740分别连接到PLC的Y20~Y24,可以利用PLC实现电动机的多段速控制。
(四)PLC程序设计
该设计下位机控制部分与上位机仿真软件间控制信息的传递靠PLC的寄存器与MCGS组态中的动态数据库建立起的通道。因此,PLC与上位机的通讯程序不需要特殊编制。所有电气控制线路的PLC程序采用子程序的方式,通过上位机选择需要联动的设备,选择电气线路后,对应设备的下位机PLC调用对应的PLC子程序,从而实现上位机仿真软件与下位机设备之间的联动。
三、上位机仿真软件设计
(一)MCGS组态软件介绍
MCGS(Monitor and Control Generated System)是一套基于Windows平台的用于快速构造和生成上位机监控系统的组态软件系统。 MCGS为用户提供了解决实际工程问题的完整方案和开发平台,能够完成现场数据采集、实时和历史数据处理、报警和安全机制、流程控制、动画显示、趋势曲线和报表输出以及企业监控网络等功能。
(二)软件界面及菜单结构设计
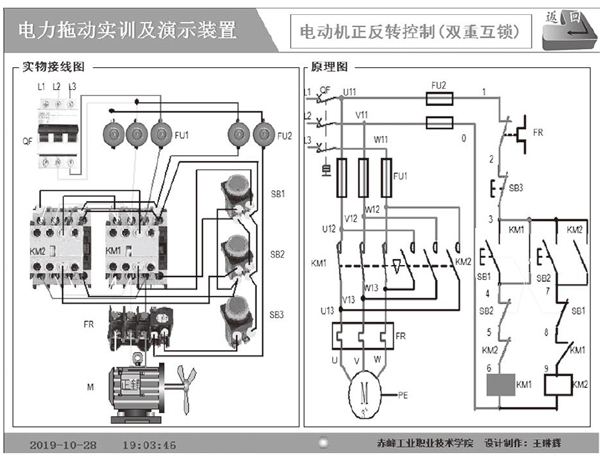
采用三级菜单结构设计,第一级主菜单,第二级、第三级菜单在首页也可直接进行访问。软件中每一个电气线路均为一个独立的窗口,点击线路菜单则跳转到对应的线路窗口,并关闭当前窗口。同时,所有的变量均会复位。软件主界面及部分控制界面如图2所示。
(三)软件电路仿真、控制功能设计
每一个线路图均包含有实物接线图和原理图,其中图中的每一个元器件、每一个元器件符号均是一个多位开关或多位动画组件,当点击相关的元器件或元器件符号时,根据电路脚本程序所编写的逻辑关系,相关变量发生变化,与变量通过设备通道连接的PLC寄存器将发出相应的动作,与对应PLC的Y寄存器输出端子相连的继电器将发生动作,从而实现了电路逻辑仿真动画与实训设备实物联动的效果。同时,通过合分和按压实训设备上的开关、按钮,PLC的对应输入端子有输入,根据PLC程序,PLC的输出也将发生变化,与之相连接的上位机仿真软件的变量将根据脚本程序的逻辑发生变化,带动仿真软件上的电路动画动作,从而真正做到了仿真软件与实训设备实物的联动。
现以电力拖动双重互锁正反转控制线路为例,脚本程序如下所示:
//电动机正转启动程序
if QF_M130=1 and SB1_M101=1 and SB2_M102=0 and FR3=0 then
KM6=1
KM7=0
SB2_M102_XS=2
FR3_XS=1
SB2_XS=2
SB1_XS=0
KM6_XS=1
KM7_XS=2
Endif
//电动机反转启动程序
if QF_M130=1 and SB3_M103=1 and SB2_M102=0 and FR3=0 then
KM7=1
KM6=0
SB2_M102_XS=2
FR3_XS=1
SB1_XS=2
SB2_XS=0
KM6_XS=2
KM7_XS=1
endif
//电动机停转程序
if QF_M130=0 or SB2_M102=1 or FR3=1 then
KM6=0
KM7=0
SB2_M102_XS=0
KM6_XS=0
KM7_XS=0
SB1_XS=0
SB2_XS=0
endif
//热继电器动作程序
if FR3=1 then
FR3_XS=2
endif
if FR3=0 and KM6=1 or KM7=1 then
FR3_XS=1
endif
if FR3=0 and KM6=0 and KM7=0 then
FR3_XS=0
endif
//SB1 ,SB3 组件显示逻辑程序
if SB1_M101=1 then
SB1_XS=1
endif
if SB1_M101=0 then
if KM7=0 then
SB1_XS=0
endif
if KM7=1 then
SB1_XS=2
endif
endif
if SB3_M103=1 then
SB2_XS=1
endif
if SB3_M103=0 then
if KM6=0 then
SB2_XS=0
endif
if KM6=1 then
SB2_XS=2
endif
endif
//SB2組件显示逻辑程序
if SB2_M102=1 then
SB2_M102_XS=1
endif
if SB2_M102=0 then
if KM6=1 or KM7=1 then
SB2_M102_XS=2
endif
if KM6=0 and KM7 =0 then
SB2_M102_XS=0
endif
endif
//电动机M组件正转动画显示逻辑程序
if KM6=1 or KM7=1 then
M3=1
else
M3=0
endif
if KM1=1 or KM6=1 or KM3=1 then
D1=1? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?//显示:正转
旋转可见度=1-旋转可见度
if M3_XS<7 then
M3_XS=M3_XS+1
else
M3_XS=0
endif
endif
//电动机M组件反转动画显示逻辑程序
if KM7=1 then
D1=2? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?//显示:反转
旋转可见度=1-旋转可见度
if M3_XS>0 and M3_XS<=7 then
M3_XS=M3_XS-1
endif
if M3_XS<=0 then
M3_XS=7
endif
endif
if KM1=0? AND KM6=0 and KM7=0 AND KM3=0 then
D1=3? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?//显示:停转
Endif
四、 结束语
本研究在考虑了人机工程学的基础上,对基于RS485转串口、以太网通讯的模式的下位机实训装置的本体进行了设计与实现,同时进行了电路以及PLC程序的设计,基本实现了对下位机的控制性能。同时针对上位机的开发目标,基于MCGS组态软件详细设计并实现了电力拖动的线路仿真,并通过该上位机仿真软件与下位机实训装置硬件终端人机界面采用线缆或以太网的方式进行连接测试。测试结果表明,本研究正确有效,应用于本学院电力拖动实训课,取得了良好的教学效果,得到了师生的好评。
参考文献:
[1]胡兵.基于MCGS和PLC的虚实结合实验模型设计与实现[J].电子设计工程,2018,(3).
[2]卞秀辉.基于MCGS模拟仿真PLC实训设备的设计[J].宁波职业技术学院学报,2017,(8).
[3] 陈长全.虚拟仿真实训平台的研究与设计[J].电子世界,2018,(9).
[4] 孙式运,杨清志.MCGS组态控制技术在PLC项目教学中的应用[J].辽宁科技学院学报,2017,(10).
[5] 孙立新,徐良君,杨东宇,董玉召.基于MCGS的三维动态仿真系统开发[J].机械设计与制造,2017,(10).
- 附表6:湖南省2018年饲料添加剂、添加剂预混合饲料产品批准文号名单(一)
- 附表5:湖南省饲料和饲料添加剂委托生产备案名单(2018年1月1日-2018年2月28日)
- 附表4:湖南省获浓缩饲料、配合饲料、精料补充料、单一饲料生产许可证企业名单(续二十五)(2018年1月1日一2月28日)
- 附表3:湖南省饲料添加剂、混合型饲料添加剂生产许可证企业名单( 2018.1.1—2018.2.28)
- 附表2:2018年饲料和饲料添加剂许可证注销企业名单(2018年1月1日-2月28日)
- 附表1:湖南省添加剂预混料生产许可证企业名单(2018.1.1—2018.2.28)
- 服务养殖,共赢未来
- 饲用酶制应用研究进展
- 奶牛饲料中霉菌毒素的危害及对策
- 中草药添加剂在养猪生产中的运用
- 浅谈影响猪肉品质的因素
- 浅谈中草药在肉鸽养殖中的应用
- 采食调控技术对母猪生产性能的影响
- 农业部2018年畜牧业工作要点
- 2017年我国禽蛋生产形势回顾及2018年走势分析
- 容氨酰胺的功能及其在断奶仔猪生产中的应用
- 柠条的营养特性及其在动物生产中的应用
- 湖南发展饲用甜高粱初探
- 单宁酸的生理功能及其在畜禽生产中的研究进展
- 黄曲霉毒素B1的检测方法
- 竹叶黄酮的微波提取及工艺优化
- 附表5:湖南省2017年饲料添加剂、添加剂预混合饲料产品批准文号名单(六)
- 附表4:湖南省饲料和饲料添加剂委托生产备案名单(2017年11月16日-2017年12月31日)
- 附表2:湖南省饲料添加剂、混合型饲料添加剂生产许可证企业名单 (2017.11.1-2017.12.31)
- 附表l:湖南省添加剂预混料生产许可证企业名单 (2017.11.1-2017.12.31)
- admonishments
- ad nauseam
- ado
- adobe
- adobelike
- adobes
- adolescence
- adolescences
- adolescent
- adolescently
- adolescents
- a done deal
- adopt
- adoptabilities
- adoptability
- adopted
- adoptee
- adopter
- adopters
- adopting
- adoption
- adoptional
- adoptioncurve
- adoption curve
- adoptionist
- 值得祝贺的、使人高兴的事
- 值得祝贺的事
- 值得称道
- 值得计较
- 值得赞许
- 值得高兴和庆贺的事
- 值得高兴或祝贺
- 值日
- 值班
- 值班巡逻
- 值班看守
- 值班看守监牢
- 值虎
- 值贵
- 值身
- 值过儿
- 值遇
- 值重
- 值钱
- 值顶值
- 倾
- 倾世
- 倾乡
- 倾乡倾向
- 倾乱