摘 要 随着社会的发展。居民楼、办公楼的楼层也越来越高。因此,擦洗玻璃的“难度系数”和“危险系数”也将大大增加,有些市民找了家政公司,由“蜘蛛人”代为清洁,而有的则由自己动手解决。但是,无论是家政公司的“蜘蛛人”,还是市民自己,都不能忽视了高层户外擦玻璃的危险性。生活中,我们经常能看到市民站在窗沿、防盗窗栅栏上擦洗户外窗户,也能看到站在云梯上擦洗窗户的“蜘蛛人”,这是十分危险的,一旦发生意外,后果均是比较严重的,轻则受伤,重则丢失宝贵的生命。由于户外擦洗窗户而不幸坠楼身亡的报道屡见不鲜,解决此问题也已经迫在眉睫了,因此提出了一种智能化高层户外窗户清洁装置的设计理念。
关键词 智能化;高层户外;清洁装置
中图分类号 TP2 文献标识码 A 文章编号 1674-6708(2017)180-0040-02
1 背景与发展现状
随着科技的发展,越来越多的电子产品和智能化商品出现在了市场上,但是对于户外窗户清洁装置来说,并没有得到很大的突破与改进。
目前,人们普遍使用的户外窗户清洁装置具体可分为两类。第一类是擦窗器双面擦,其主要工作原理是利用两面带有磁力的擦块分别放置在窗户的前后两面,通过移动室内的擦块来带动室外的擦块移动,完成对户外窗户的擦洗,此类擦洗装置存在着无法对厚窗户进行擦洗,双面擦吸附在一起难以分离,擦洗过程中放置在户外的擦块容易掉落等诸多不足。
另一类是利用雨刮器的方式对户外窗户进行擦洗,不够此类装置存在着一对雨刮器仅能对应一扇窗户,成本过高,而且控制不便,不能收回导致使用寿命短,实用性不足。
由此可见,目前市场上没有真正适用于广大居民使用的户外窗户清洁装置,因此,本设计的智能化高层户外窗户清洁装置具有较高的社会 效益。
2 装置的结构与功能
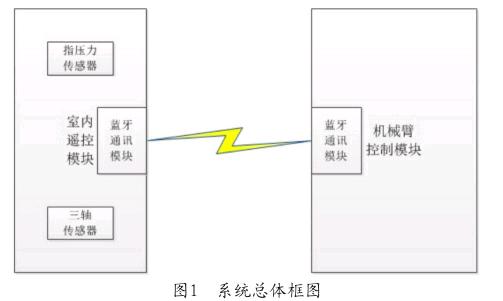
本设计主要分两个模块,分别是安装在用户手上的智能手套模块与安装在窗户上的机械手控制模块,两个模块通过蓝牙模块进行数据通讯,如图1所示。
2.1 室内遥控模块
1)电源模块:通过电源适配器连接电源插口进行供电。
2)处理器模块:处理器模块采用ARM架构的32位STM32微处理器。
3)人体感应模块:采用陀螺仪传感器与指压力传感器。需要调整机械臂时,摇晃手来控制方向;长度不够时,通过按压指压力传感器用来增加机械臂覆盖范围。
4)蓝牙通讯模块:二个模块之间采用蓝牙进行通讯。
2.2 机械臂控制模块
1)电源模块:通过电源适配器连接电源插口进行供电。
2)处理器模块:处理器模块采用ARM架构的32位STM32微处理器。
3)机械臂控制模块:采用6个舵机进行机械臂控制,分别用六路PWM波形进行分路控制。
4)蓝牙通讯模块:二个模块之间采用蓝牙进行通讯。
通过以上模块使得本智能化高层户外窗户清洁装置具有以下功能:
1)采用机械臂代替人工的方式对户外玻璃进行擦洗:在日常生活中,人们对窗户擦洗往往采用人工手段,人站在窗沿边上对户外窗户进行清洁,这对于居住在高层的居民来说是十分危险的,本装置利用机械臂代替人工对户外窗户进行擦洗,显著提高了高层居民清洁户外窗户的安全性。
2)本装置通过陀螺仪传感器来操作擦窗方向的控制:普通的控制器控制距离短,而且方向感应不灵敏,利用陀螺仪传感器可以较为灵敏地来操作擦窗方向。
3)为进一步提高本装置的实用性,本装置采用压力传感器来进行机械臂的伸缩控制,通过这种方式把机械臂设计成可伸缩模式,就能够对不同尺寸的窗户进行擦洗了。
4)采用软硬件协调技术:本装置采用了嵌入式硬件与软件相结合的方式,将程序经编译后固化到程序芯片中,提高了装置的可靠性。
5)采用蓝牙通信技术:传统人工擦洗或使用擦洗器双面擦擦洗户外窗户时,清洁人员需站在窗户旁或窗沿上。本装置通过蓝牙通信技术,实现了在室内也能对户外窗户清洁的功能。
6)本装置通过在底部安装有一个拖台,提高了装置的安全性能,防止机械臂在使用过程中滑落造成意外发生。
3 装置的测试与工作过程
3.1 装置测试
1)该设计的测试分为硬件测试、软件测试、软硬件联调测试与整体机器总体测试4个步骤。必须要按序进行。一旦发现问题将进行问题反馈与修正,重新提交测试。
2)硬件测试主要包括各硬件模块的功能测试,首先是电源模块测试,然后是处理器模块测试,接下去就是人体感应模块和机械臂控制模块的单独测试,确保个硬件组成部分的芯片與连接的 完好。
3)软件测试主要指应用软件的测试,按照设计功能要求进行完整的功能性测试,确保各个功能均可正常运行。
4)软硬件联调测试包括正常工作状态下的测试与异常工作状态下的测试,在此过程中,要增加一些容错性处理。
5)整体机器联调:主要是电子部分与机械部分要进行联调,一方面是机械尺寸与安装方式的配合,另一方面是机械执行机构的测试与完善。
6)具体测试方法:将机械臂拖台放置在窗沿上,待稳定之后,在室内操控“控制手套”。利用“控制手套”上的陀螺仪传感器完成对机械臂方向移动上的控制;利用指压力传感器完成对机械臂伸缩的控制。调试完毕确认能完成上述功能。
3.2 装置使用时的操作流程
本装置的具体工作流程为,将机械臂拖台固定在所需清洗的窗户旁的窗沿上。通过按键来启动机械臂,并采用陀螺仪传感器操作方向完成对玻璃的清洗。若机械臂初始长度不够,采用指压力传感器调节拉伸机械臂进行清理。当清理完成一块玻璃后,卸下拖台并安装到下一扇所需清理的玻璃旁即可。
4 结论
本文设计的智能化高层户外窗户清洁装置,利用自动化控制的原理,使得人们可以在室内完成室外窗户的清洁工作,相比于原有的方法更加安全和方便。但是在该装置的实施过程中,也存在着一些问题。
拖台的设计:因为此装置要安放在不同材料,形状的窗沿上,所以拖台本身要具有较强的适应性与稳定性。
电子元器件选择:由于本设计主要用于家用环境,故元器件都可以采用商用级,无需专门的工业级。
机械臂长度的确定:通过查阅资料以及量取周围家庭玻璃的尺寸,确定机械臂的初始长度以及拉伸后所需达到的长度。
考虑到产品的受众定位,设计性价比要尽可能高。对产品的材料与原件的选择要在符合质量要求的前提下选择经济性高的。
因此,该装置还需要进一步的改进和提高来完善整个装置,相信在不久以后该装置可以被应用到生活当中,为人们的生活带来安全与方便。
参考文献
[1]孙以材,刘玉岭,孟庆浩.压力传感器的设计制造与应用[M].北京:冶金工业出版社,2000.
[2]王桂荣,李宪芝.传感器原理及应用[M].北京:中国电力出版社,2010.
[3]黄志昌.自动化生产设备原理及应用[M].北京:电子工业出版社,2007.
- 在小学数学教学中培养学生独立思考能力
- 如何在小学数学课堂培养学生的解题策略
- 浅谈如何提升学前教育教学质量
- 幼儿园中班幼儿节奏训练之我见
- 幼儿园青年教师教学能力大赛的思考
- 幼儿园教学游戏化的现状及实施策略研究
- 谈如何发展幼儿的语言表达能力
- 弘扬蔡伦文化,育“三心”美德少年
- 播种善心,形成善行
- 环境·内涵·精神
- 爱美相伴,扶本正源
- 打赢儿童阅读与网络游戏争夺战
- 培养六年级学生信息技术课程学习兴趣
- 多媒体技术在小学数学课堂教学中的应用
- 信息技术在中高年级数学教学中的运用
- 在体育与健康课程中养成良好的行为习惯
- 试论体育游戏在小学体育教学中的运用
- 浅谈如何提高小学生上体育课的兴趣
- 东北地区幼儿园体育活动困境与解决策略
- 让学生成为学习的主人
- 培养良好书写习惯从细节做起
- 农村小学作文教学之我见
- 立足核心素养理念 开辟阅读教学新路径
- 实施绿色教育,提高教学的有效性
- 如何构建充满人文气息的小学语文课堂
- the latest thing
- the latter
- the lead
- the leading edge (of sth)
- the least
- the left
- the letter of the law
- the liberal democrats
- the light fades
- the lights are on
- the limelight
- the lion's share
- the little guy
- the logistics of sth
- the longest time
- the lords
- the lot
- the lot of them/us/you etc
- the love of your life
- the lowest
- the lure of sth
- them
- the main/key points
- the man/woman in the street
- the marines/the marine corps
- 铁打的罗汉
- 铁打的肠子铜铸的心
- 铁打的肠子,铜铸的心
- 铁打的脑壳——不转向
- 铁打的营盘流水的兵
- 铁打的营盘,流水的兵
- 铁打的衙门流水的官
- 铁打的衙门,流水的官
- 铁打的钉耙——是个硬货
- 铁打的锁链
- 铁打的锁链——一环套一环
- 铁打的锁链——一环扣一环
- 铁打的馒头——啃不动
- 铁打衙门流水官
- 铁打铜铸
- 铁托
- 铁托派
- 铁扫帚
- 铁拐李
- 铁拐李卖跌打药
- 铁拐李摆摊——蹩脚货
- 铁拐李的脚——高的高,低的低
- 铁拐李的葫芦
- 铁拐李的葫芦——不知卖的什么药
- 铁拐李绑斧子——一步一砍(坎)