于丽颖
摘要:少齿差行星减速器适用于制造大棚卷膜器。利用Inventor辅助设计功能完成内啮合齿轮传动设计计算,建立一种高效机械传动优化设计方案,提高设计效率和可靠性,从而实现快捷、精准设计的目的。
关键词:卷膜器;少齿差行星传动;优化设计
中图分类号:TH132.425? ? 文献标识码:A? ? 文章编号:1674-1161(2020)03-0018-05
随着我国水稻机械化插秧技术的大面积推广,工厂化育苗规模也逐年增加。目前我国工厂化育苗大棚长度多为几十米至百米,卷膜器布置在大棚两侧,卷膜时存在无法同步问题,极易损坏棚膜。本课题设计将大棚卷膜器布置在大棚中间,通过卷膜轴回转实现卷膜和放膜,这就要求卷膜器必须具有体积小、质量轻、传动比大、效率高、承载能力强、运转可靠及寿命长等特点。少齿差行星减速器基本能够满足以上要求,但其設计工作复杂繁重,同时受设计人员人为因素影响,直接关系到减速器的设计质量。本课题利用Autodesk Inventor软件完成三维参数化实体模拟,再利用计算机辅助设计完成繁琐的设计计算,以实现快捷、精准设计的目的。
1 Inventor软件简介
Inventor是美国Autodesk公司推出的一款三维可视化实体模拟软件,可以直接进行计算机辅助设计,代替以往人工设计中查表(图)选择参数、计算、分析、校核计算等繁重的工作。应用Autodesk Inventor软件中计算机辅助功能,直接输入设计参数,就可以建立三维模型,并进行测评,不仅大大缩短了设计时间,还杜绝了人为因素的影响,实现高效精准设计。
2 育苗大棚电动卷膜器阻力矩及电机功率计算
大棚卷膜器安装于大棚中间,通过电机带动减速器驱动卷膜辊轴沿育苗大棚骨架向上滚动,在滚动过程中将棚膜缠绕在辊轴上,实现卷膜;反之实现放膜。设计大棚高度H=3.0 m,前端放风高度h=1.2 m,暖棚跨度B=10.0 m,放风长度l=0.8 m,棚长度L=80.0 m ,棚膜厚度s=0.01 mm。卷膜作业时间为3 min。
2.1 阻力矩计算
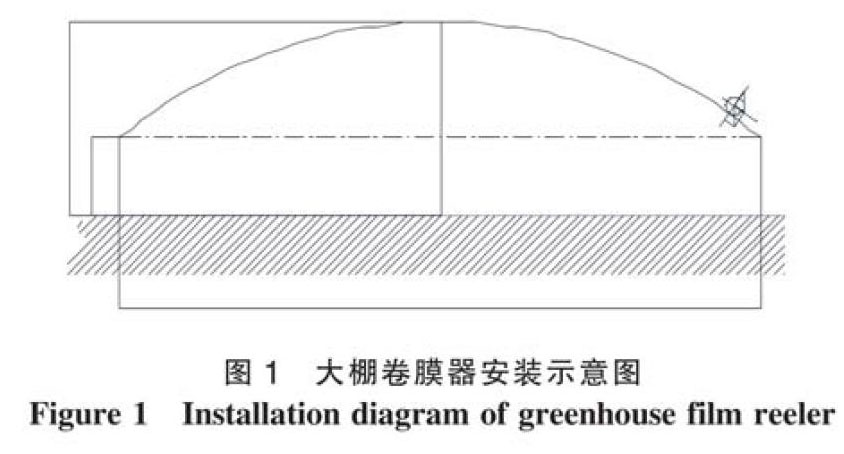
大棚卷膜器安装示意图如图1所示。为便于计算,假设各主要部件的作用点均在卷膜轴中心线上。卷膜轴主要构成为电机、减速器、卷膜轴和棚膜。卷膜电机和减速器为一体设计,其质量为G1=2.8 kg;卷膜轴选用薄壁钢管(外径φ27,壁厚为1.00 mm;理论质量0.593 kg/m),故80.0 m大棚实际卷膜轴质量为G2=81.00×0.593=48.0 kg;最大卷膜膜质量G3=8×800×0.01×0.94=60.0 kg。
卷膜器通过卷膜辊与大棚连接,其受力分析如图2所示。
图2中:G为卷膜器整体重力,G=G1+G2+G3=110.8 kg;N为大棚对卷膜器的支撑力,Gy为卷膜器整体重力作用于大棚的分力,由大棚支撑力平衡,即N=Gy;F为卷膜器整体重力沿大棚切线方向的分力,F=Gx。
由于Y轴是大棚圆弧曲面的法线,X轴为切线,故卷膜器整体重力G的X轴分力F=Gx=G×sinα。卷膜器整体重力最大时,夹角为α角,受力分析如图3所示。
经分析计算,此时α角为34 °,故卷膜器整体重力G的X轴分力F=Gx=G×sinα=110.8×sin34 °=58.622 kg。
卷膜辊外径为φ27,最大卷膜圈数为9圈,最大卷膜半径r=14.40 mm,最小卷膜半径为13.50 mm。
由于卷膜过程中运动速度很慢,近似匀速直线运动,故最大卷膜阻力矩MZ=F×r=83.0 N·m。卷膜器扭矩N=k×MZ=1.2×83.0=99.6 N·m。式中k为安全系数,取1.2。
2.2 电动机选择
按工作要求和工作条件,综合考虑微型直流电机和减速器的尺寸、质量、价格等因素,为使传动装置结构紧凑,选用24 V,100 W,3 000 r/min的直流微型电机和少齿差行星减速器。
电机结构为全封闭。电机有效功率为:
P==41.7 W
式中:n为卷膜器工作转速,设计取3.6 r/min。
减速器与电机直联,减速器效率设计为η=0.7,安全系数K=1.3。电机功率为:
Pd==77.44 W
3 少齿差行星减速器设计
3.1 齿轮传动型式选择
少齿差行星减速器按传动类型可分为4类,即K-H-V型、2K-H型、2K-V、K-H型(K代表中心轮,H代表输入转臂,V代表从动输出)。根据传动比i的大小确定少齿差行星减速器的结构型式。当i>100时常采用内齿轮输出的2K-H型,其结构如图4所示。
2K-H型少齿差行星减速器结构由2个中心轮K和行星架(即输入转臂轴)H组成,共同完成减速与输出任务。传动由2对内啮合齿轮副组成,齿轮1,2为一级传动,齿轮3,4为二级传动。传动比i的计算公式为:
ix4=z1z4/(z1z4-z2z3)
3.2 齿数差确定
内啮合齿轮副外齿轮数与内齿轮齿数之差称为齿数差zd,计算公式为:
zd=z2-z1
传动比i的绝对值等于行星轮齿数除以中心轮与行星轮的齿数差,齿数差愈小,则传动比i的绝对值愈大。因此为了得到较大的传动比i,希望齿数差小,一般取齿数差为zd=1,大动力传输时取zd>2。由于本设计传动动力较小,但需要的传动比大,故选择齿数差zd=1。
3.3 传动比计算
由于本设计要求卷膜速度为4 r/min左右,故总传动比i预定为i=3 000÷3.5=857.14。
由传动比和齿轮差的计算公式可得出齿轮z2的计算公式为:
z2=(1/2)[zd+zc+]
计算取整后,得:z1=41,z2=42,z3=39,z4=40。
所以,总传动比i=840,齿差数zd=1,实际转速n=3.571 r/min,满足要求。
3.4 齿轮传动参数选择
在少齿差内啮合齿轮传动中,主要干涉是发生在齿轮顶的齿廓重迭干涉。可采用短齿和正变位齿轮修正。一般是在保证重合度εa>1的条件下,合理选择齿顶高系数h*和啮合角α′,然后选出适宜的外齿轮变位系数x1和内齿轮变位系数x2,从而保证齿廓重迭干涉度达到较理想的期望值Ga。
3.4.1 齿形角和齿顶高系数 采用标准齿形角齿轮,由于齿数差取定为zd=1,故齿形角取值为14~25 °,选择标准齿形角为20 °,便于加工和降低制造成本。齿形角取20 °时,齿顶高系数h*=0.6~0.8。当h*减小时,啮合角α′也减小,有利于提高效率。但当h*过小时,变位系数x1和x2太小,会发生外齿轮切齿干涉(根切)或插齿加工时负啮合。
3.4.2 重合度εa 重合度εa是表示齿轮传动连续性的参数,必须保证εa>1。当变位系数选定后,需要进行重合度验算,若εa<1,应减小外齿轮变位系数x1重新计算。重合度εa应符合如下公式:
εa=
[z1(tanαa1-tanα′)-z2tanαa2-tanα′]>1
3.4.3 啮合角α′ 啮合角α′受齿轮啮合齿数差zd=z2-z1和变位系数差x2-x1的影响,在变位系数没有确定前查《机械设计手册》,根据齿数差选取。
3.4.4 齿廓重迭干涉度Ga 齿廓重迭干涉度Ga是指外齿轮与内齿轮啮合结束后,外齿轮齿顶退出内齿轮齿槽时,外齿轮和内齿轮齿顶所发生的重迭干涉程度。当Ga<0时,表示存在重叠干涉;当Ga>0时,表示无重叠干涉。一般取齿廓重迭干涉度Ga≥0.05 mm。齿廓重迭干涉度Ga应符合如下公式:
Ga=z1(invαa1+δ1)-z2(invαa2+δ2)+zdinvα>0
3.4.5 变位系数差x2-x1 变位系数差x2-x1应符合如下公式:
invα=invα+2tanα[(x2-x1)/z2-z1]
经综合计算和实际确定,啮合角α′=54.092 °,则变位系数差x2-x1=0.32。
4 齿轮传动设计
4.1 模数确定
本设计传动功率较小,仅为77 W(100 W电机)。根据2K-H型传动结构特点,在偏心轴上安装2个行星轮。外齿轮选用45号钢调质,硬度HB=220~250,齿轮的弯曲极限应力σim1=650 MPa;内齿轮选用45号钢调质后表面淬火,硬度HRC=40~50,查得齿轮的弯曲极限应力σim2=850 MPa。由于原动机为电动机,工作载荷变化均匀,工作机仅有轻微振动,故系数KA=2.0,动载荷KV=1.4,经计算取标准模数m=1。
4.2 齿轮传动强度设计计算
利用Autodesk Inventor Professional 2015完成齿轮传动设计计算。首先启动Inventor软件,进入设计加速器中齿轮设计中,在显现界面的对应项中输入前面确定的设计参数。
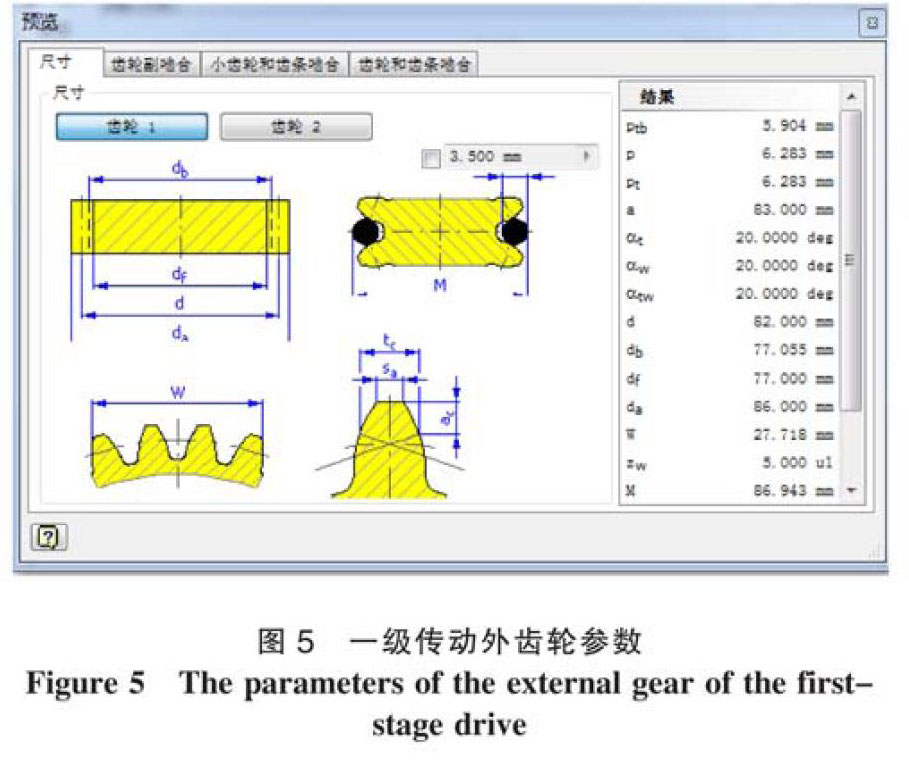
4.2.1 一级传动设计 图5和图6为一对啮合齿轮外齿轮和内齿圈的参数信息输入界面。
输入齿轮参数后,回到“正齿轮零部件生成器”中,输入齿轮传动特性参数(如圖7所示)。
输入齿轮传动特性参数后,点击“计算”,出现计算结果界面(如图8所示)。
软件直接告知计算结果表示设计是否正确。如果设计符合要求,可直接采用;如果存在问题,则返回修正参数,直到计算结果符合设计要求。图8为经过修正后的计算结果,软件告知“计算结果表示设计正确”,同时SH(点蚀安全系数)、SF(齿强度安全系数)、SHst(静态接触强度)、SFst(静态弯曲强度)的值均较为合理,表示该设计安全可靠,并已进行了优化设计,传动设计合理。
4.2.2 二级传动设计 二级传动设计与一级传动相同。图9为外齿轮参数信息输入界面,图10为内齿圈参数信息输入界面,图11为齿轮传动特性参数信息输入界面,图12为二级传动设计计算结果。在对应界面输入设计参数,根据计算结果适当调整设计参数,完成优化设计。
5 结语
少齿差行星减速器广泛应用于农业机械传动中,可以节省能耗和降低机具制造成本。利用计算机辅助设计功能可极大地简化少齿差行星减速器设计中繁琐的人工计算,避免人为因素影响,实现设计优化。
参考文献
[1] 张鹏,杨坤,储恒超,等.双滚柱少齿差行星传动齿形综合与精度优化[J].福州大学学报:自然科学版,2019,47(4):482-488.
[2] 陈岱民,温坚,何平,等.少齿差行星齿轮传动的设计计算与计算机辅助设计[J].光学精密工程,1996(6):30-42.
[3] 田建忠.少齿差行星齿轮传动的虚拟装配与动态仿真运动[J].山西科技,2016,31(5):52-54.
Design of A Planetary Transmission with Less Tooth Difference Seedling
Greenhouse Film Reeler based on Inventor
YU Liying
(Liaoning Agricultural Technical College, Yingkou Liaoning 115009, China)
Abstract: Planetary gear reducer with less tooth difference is suitable for manufacturing greenhouse film reeler. Inventor assisted design function is used to complete the design calculation of internal meshing gear drive, and an efficient mechanical drive optimization design scheme is established to improve the design efficiency and reliability, so as to realize the purpose of fast and accurate design.
Key words: film reeler; planetary transmission with less tooth difference; optimization design
- MRI电源故障报警系统设计
- 提高计算机网络可靠性的方法
- 数字微波通信在水库系统视频监控中的应用
- 试论计算机网络数字数据通信技术
- 微机监测系统原理及其在设备隐患排除中的应用
- 基于电力信息系统进行整合的实用方案构建研究
- 可视化的二维码质量追溯系统在建筑工程中的应用
- 220kV变电站电气自动化系统控制的分析
- 膜分离技术在牛初乳加工中的应用
- 核电压力容器充氮气保护装置的设计技术
- 连铸机结晶器振动装置导向板的计算验证
- 网络环境下的个性化情报信息服务
- 长输油气管道阀室太阳能供电系统的使用和维护
- 二氧化碳气体保护焊工作原理简介
- 利用VB实现AutoCAD二次开发中参数化绘图
- 控制高温合金零件喷涂变形
- 试论规约分析系统在电力调度中的运用问题
- 基于组件技术的GIS研究与应用
- 《数控车床编程》的教学应用研究
- 关于微机五防系统在变电站的应用分析
- 初探智能化技术在建筑电气工程中的应用
- 板式换热器腐蚀与防护技术简析
- 探讨含过渡金属配合物的合成、晶体结构及性质
- 三维激光扫描仪的数据处理与精度控制
- 浅析施奈德—昆腾?系列中浮点数的解析与上送
- handicrafter
- handicrafters
- handicrafts
- handicraftship
- handicraftships
- handier
- handies
- handiest
- hand-in
- handiness
- handiness'
- handinesses
- handiness's
- handing
- handing-in
- hand in/give in
- hand in glove with sb
- handing-over
- hand in your notice/resignation
- hand-it-to
- handiwork
- handiworks
- handkerchief
- handkerchiefs
- handkerchieves
- r2022090420001532
- r2022090420001533
- r2022090420001535
- r2022090420001536
- r2022090420001537
- r2022090420001538
- r2022090420001539
- r2022090420001541
- r2022090420001542
- r2022090420001543
- r2022090420001544
- r2022090420001545
- r2022090420001546
- r2022090420001548
- r2022090420001549
- r2022090420001550
- r2022090420001552
- r2022090420001553
- r2022090420001554
- r2022090420001555
- r2022090420001557
- r2022090420001558
- r2022090420001559
- r2022090420001560
- r2022090420001561