傅依新 木合塔尔·克力木


摘要:为解决采棉机遇到路面障碍物时采棉头升降液压缸不同步问题,对整个液压系统进行设计。采用AMESim仿真的方法,首先对采棉机采棉头升降液压系统进行了AMESim液压系统建模,施加变化的负载,分析整个液压系统液压缸的运动情况;其次,对整个采棉机采棉头升降液压系统施加PID控制,使3个液压缸升降同步效果更好;最后对整个液压系统进行可编程逻辑控制器(programmable logic controller,PLC)设计,实现PID控制。结果表明,通过PID控制,可以实现3个液压缸的同步效果;对采棉机采棉头升降系统进行PLC设计,实现PID控制。
关键词:液压系统;不同步;PID控制;PLC设计
中图分类号:TH137.7;S225.91+1?文献标志码:A?文章编号:1002-1302(2020)21-0233-05
我国是世界上棉花单产量最高的国家,新疆地区由于自然条件的优势,非常适合种植棉花,所以采棉机的研究对于新疆地区来说具有非常重要的意义[1-2]。目前国内外采棉机分为2种形式,包括垂直摘锭式和水平摘锭式,垂直摘锭式采棉机采棉部件结构简单、制造容易、成本较低,但是需要考虑采棉头升降问题。本研究是在垂直摘锭式的基础上进行的。本垂直摘锭式三行采棉机采棉头共3组,每组采棉头分别由2个采棉滚筒组成,当遇到障碍物时,每组采棉头由一个液压缸控制升降。但是实际过程中,3组采棉头的升降过程中出现运动不同步现象。本研究采用常见的阀后补偿控制系统[3-4],进行液压系统设计,并且对整个液压系统施加PID控制,以达到同步的效果,最后进行PLC设计,以实现PID控制功能。
1 采棉头升降液压系统设计及基本方程
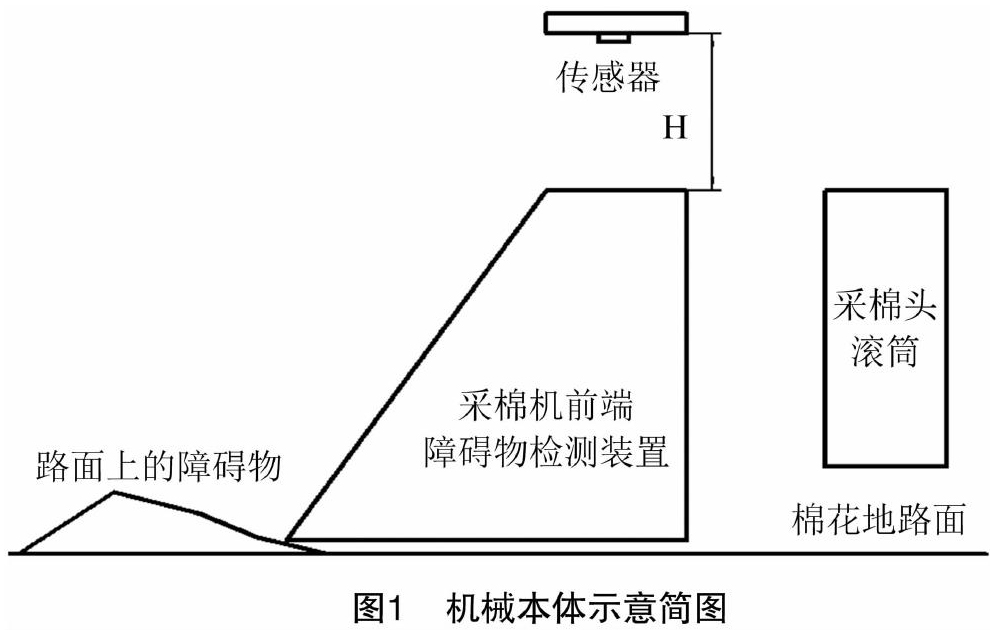
1.1 机械本体介绍
图1为1组采棉头的示意简图,当采棉机前端障碍物检测装置被路面上的障碍物顶起时,传感器前端障碍物检测装置与传感器的距离为H,传感器把信号传输到PLC中,从而用PLC控制采棉头的升降,以避免触碰到障碍物。本研究使用1个传感器控制3个采棉头的升降,以达到同步的效果。
1.2 液压系统设计
本液压系统采用1个负载敏感泵控制3个液压缸,其中1個液压缸控制1个采棉头的升降。采用负载敏感泵,使整个液压系统的节能效果更好;液压油从负载敏感泵1流经单向阀3,通过换向阀4控制液压缸的伸出与缩回;梭阀6将高压油引向补偿器5和负载敏感泵1,从而控制液压缸的同步和整个系统的流量压力。
1.3 必要参数
通过ADAMS软件仿真,液压缸的出力约6 000 N,经计算选液压缸杆径(d)为50 mm,缸径(D)为 80 mm,系统的压力为5 MPa,流量100 L/min。3个换向阀选择原上海立新直动式比例换向阀4WRA10E60-L2X/G24-15-N9-Z4,由于此负载敏感泵同时控制采棉机的采棉头提升、发棉头防卡、棉花压实和棉箱侧翻系统,所以此处暂时不选择型号。
1.4 基本方程
变量泵排量为
式中:wp为变量泵的转速(r/min);Cip为泵内泄漏系数;Cep为泵外泄漏系数;pr为低压管道的补油压力(MPa);p1为高压管道的压力(MPa)。
滑阀的压力-流量特性方程为
式中:Ap为缸有效面积(m2);xp为活塞位移(m);Ctp为缸总泄漏系数;V1为缸进、回油腔容积(m3);βe为体积弹性模量;t表示时间(min)。
2 系统仿真分析
2.1 不施加控制的液压系统仿真
原液压系统采用1个定量泵控制3个液压缸,每个液压缸各通过1个节流阀控制流量,仿真模型如图3所示。
对液压缸施加不同的负载力(图4)。
根据牛顿第二定律知:
式中:F为采棉头液压缸负载力(N);m为采棉头总质量(kg);g为重力加速度(9.8 m2/s);a为采棉头加速度(m2/s)。
加速度公式:
式中:vmax为采棉头上升的最大速度(m/s);x为采棉头升降位移(m)。
根据实际测量,采棉头的总质量为600 kg,升降位移为0.7 m,采棉头上升的最大速度为0.5 m/s。所以当采棉头静止时,采棉头液压缸所承受的负载力为5 880 N,当取最大速度时,负载力为6 180 N。为确保实际工作中更加稳定可靠,仿真过程中将负载力的范围扩大到4 000~8 000 N之间?对3个采棉头施加不断变化的负载力,为确保在不同时刻3个液压缸的负载力大小不同,对3个的液压缸的负载力分别施加了0.2、0.1、0.3 Hz的频率(图4)。
设置采棉机在3 s时开始遇到路面上的障碍物,5 s时采棉机到达障碍物的最高点,之后开始下降直至到达路面。仿真结果如图5所示,可以看出,在不施加任何控制时,液压缸的伸出是不同步的,导致在遇到障碍物时3个采棉头的升降不同步,5 s时3个液压缸的活塞位移明显不同。
2.2 施加PID控制液压系统仿真
2.2.1 液压缸同步控制策略 同步控制[6]方式分为同等控制方式、主从控制方式、交叉耦合控制方式。同等控制是指多个需要同步控制的对象跟踪设定的输出分别受到控制,通过各自的控制器调节并跟随目标值,从而达到所要求的理想同步动作;主从方式,是指在系统中存在多个需要同步运动的对象,其中一个对象的输出作为其他对象的输入,从而达到同步控制的目的。本次仿真采用同等控制和主从控制2种控制结合的方式,已达到同步的效果(图6)。
2.2.2 仿真模型建立 图7为在AMESim中创建的液压系统仿真模型。部分关键参数设置:压力补偿阀HCD模型参数从左到右依次为D31=10 mm、d31=0 mm、f31=1 N、f32=12 N/mm、S3=6 mm、m3=0.01 kg、μ3=30 N/(m·s)、l3=-5-5 mm、D=10 mm、D32=8 mm、d32=0 mm。
式中:D31、d31、f31、f32、S3、m3、μ3、l3、D、D32、d32分别为活塞筒直径、活塞杆直径、零压缩作用下弹簧作用力、活塞弹簧刚度、在零位移下的弹簧压缩量、质量块质量、质量块黏性摩擦系数、位移限制、柱塞弹弓直径、柱塞筒直径及柱塞杆直径;电磁换向阀的流量为45 L/min;液压缸的黏性摩擦系数为 1 000 (N·s)/m,液压缸活塞杆的最大位移为 0.7 m。对液压系统施加PID控制[7-9],共设置了3个PID控制器,PID参数从左到右依次为P1=300、I1=10、D1=-2;P2=20、I2=10、D2=-1;P3=300、I3=10、D3=-2。
2.2.3 仿真结果分析 仿真时设置采棉机在地3 s时开始遇到路面上的障碍物,6 s时采棉机到达障碍物的最高点,之后开始下降直至到达路面(图8)。由图8可知,3 s时传感器检测到障碍物,3个液压缸开始升起,到达6 s时,液压缸上升到最高点,之后开始下降到最低点。可以看出,施加PID控制之后要比没有施加控制时3个采棉机升降液压缸同步效果更好。
3 PLC设计
3.1 PLC选型
本次PLC控制[10]设计只考虑了采棉机采棉头提升系统,忽略了侧翻、压实和风机系统。选择西门子CPU ST20晶体管PLC。12点输入,8点输出,扩展了EMAM06和EMAQ02模块,共4个模拟量输入点和4个模拟量输出点。
3.2 PLC输入、输出
图9为PLC输入输出分配表。其中利用了EMAM06和EMAQ02模块中的3个模拟量输入接口和3个模拟量输出接口。
3.3 PLC程序设计(实现PID控制)
图10为控制负载敏感泵(电机)的开启与关闭程序,1个负载敏感泵控制3个采棉头的升降。
图11为对一个采棉头升降液压缸施加的PID控制[11],PID控制模块采用的是模拟量输出模块,其中模拟量标定和过程变量标定全为双极性,控制电压为±10 V。施加的P、I和D的数值与前面仿真时相同。
4 结论
本研究对采棉机采棉头升降液压系统进行了设计,得出结论:(1)为解决采棉机遇到路面障碍物时采棉头升降液压缸不同步问题,采用阀后补偿原理对液压系统进行设计,通过AMESim仿真,分析未施加控制和施加PID控制时液压缸运动情况,得出结论:施加PID控制之后3个采棉机升降液压缸的同步效果要比没有施加控制时更好。(2)对系统进行PLC控制设计,编写PID控制模块调用程序,利用PLC实现PID控制,以解决采棉机遇到路面障碍物时采棉头升降液压缸不同步问题。
参考文献:
[1]王俊铎,李雪源,梁亚军,等. 新疆植棉区2017年棉花种业报告[J]. 棉花科学,2018,40(5):5-11.
[2]王建潭,木合塔尔·克力木. 采棉头可拼装式采棉机液压系统的设计[J]. 农机化研究,2018,40(10):57-62.
[3]马春峰,隋冬枝. 阀前补偿和阀后补偿的特点及应用[J]. 煤矿机械,2014,35(8):208-210.
[4]乔彦华. 阀前和阀后补偿调速在使用中需注意的问题[J]. 煤矿机械,2019,40(7):137-139.
[5]闻德生,商旭东,潘为圆,等. 双定子多输出泵控差動缸回路的研究[J]. 液压与气动,2017(11):23-28.
[6]屈盛官,肖传伟,方 波,等. 基于AMESim的负载敏感泵压力-流量特性影响因素探究[J]. 液压与气动,2019(5):64-71.
[7]何少佳,闫奥博,祝新军,等. 液压振动台位移补偿的PID控制方式的研究[J]. 制造技术与机床,2019(5):72-75.
[8]寇发荣,李 冬,许家楠,等. 车辆电动静液压主动悬架内模PID控制研究[J]. 液压与气动,2018(6):1-7.
[9]罗娜娜,李 广. 基于非线性PID控制的挖掘机液压系统稳定性研究[J]. 中国工程机械学报,2019,17(4):367-370.
[10]刘 洋. 西门子工业控制的PLC应用与技术分析[J]. 南方农机,2019,50(11):198.
[11]夏正龙,邓 斌. 专家规则PID控制算法在西门子PLC中实现编程设计[J]. 机电工程技术,2019,48(5):30-32,73.尤宽山,宋 力,沈 静,等. 新型湿地型多功能工作机切割器设计[J]. 江苏农业科学,2020,48(21):238-241.
- 基于战略的企业全面预算管理体系研究
- 基于时间序列的酒类饮品人均需求量预测
- 对企业实施全面预算管理的探讨
- 医院价格与绩效的联系探索
- 营业税改征增值税对建筑业税负影响
- 浅析营改增与企业的税负
- “营改增”后建筑施工企业税务问题及应对措施浅析
- 试析企业研发费用的会计核算与税务处理
- 房地产企业会计处理与税法差异研究
- 浅议“营改增”对企业税收的影响
- 增值税下建筑施工企业税收筹划解析
- “营改增”对财务管理的影响分析
- 试析“营改增”对企业财务管理的影响
- SAAS软件企业税务实务及税收优惠研究
- 电力施工企业营改增应对举措及税收筹划分析
- “营改增”对房地产企业的影响及应对措施
- 浅议房地产开发企业土地增值税税收筹划
- 国有企业内部控制体系建设实践探索
- 通过项目资金预算筹划管理防范境外EPC项目风险
- 上市公司财务危机预警模型的实证分析
- 企业并购策略及案例分析
- 互联网时代下高等院校会计专业实践课程体系创新研究
- 反向购买的通俗解析
- 低碳经济背景下绿色环保会计构建策略
- 重污染行业环境会计信息披露的研究
- non-military
- nonmillionaire
- nonmillionaires
- nonmimetic
- nonmineral
- nonminerals
- nonminimal
- non-ministerial
- nonministerial
- nonministerially
- nonminorities
- nonminority
- non-miraculous
- nonmiraculous
- nonmiraculously
- nonmiraculousness
- nonmiraculousnesses
- nonmischievous
- nonmischievously
- nonmischievousness
- nonmischievousnesses
- nonmissionaries
- nonmissionary
- nonmitigation
- nonmitigations
- 说话声含混不清
- 说话声娇柔轻细
- 说话声稚嫩
- 说话声缓慢
- 说话声轻细低微
- 说话声音低沉或含混不清
- 说话声音急促或大声
- 说话声音怪异
- 说话声音洪亮,言辞流畅
- 说话声音轻柔,态度温和
- 说话多
- 说话太多
- 说话太多而口唇干燥
- 说话夸大,不切实际
- 说话夸张的人
- 说话夹枪带棒
- 说话如鸟鸣,让人感到难懂
- 说话委婉微妙而切中要害
- 说话小心,不轻易透露情况
- 说话小心,不随便泄漏秘密
- 说话小心,做事谨慎
- 说话少
- 说话尖刻,不肯让人
- 说话尖酸刻薄,使人讨厌
- 说话带刺儿