杨云杰 朱洪前 冯磊华
摘要:由于林区道路湿滑、路面状况复杂,采用传统控制方法的防抱制动系统存在响应速度慢、鲁棒性差等问题,制动效果不理想,为此本文提出RBF神经网络与滑模变结构相结合的控制方法,建立货车在林区制动情况的分析模型。实验结果显示:与常规滑模变结构控制相比,采用基于RBF滑模变结构控制的系统制动时间减少约0.185 s,制动距离缩短约1.88 m,到达最优滑移率和最大制动力矩的时间更快,系统更稳定。因此该方法不仅能够削弱常规滑模变结构控制所引起的抖振现象,而且能够提高ABS的响应速度和鲁棒性,能够很好地适应林区湿滑、复杂的路面状况,从而验证了所设计模型在实际应用中的可行性和有效性。
关键词:防抱制动系统;径向基函数;神经网络;滑模变结构控制;抖振
中图分类号:U463文献标识码:A文章编号:1006-8023(2019)02-0055-06
Optimization Design of ABS Sliding Mode Controller?for Trucks in Forest Area
YANG Yunjie?1, ZHU Hongqian?1*, FENG Leihua?2
(1. College of Materials Science and Engineering, Central South University of Forestry and Technology, Changsha 410004;?2. College of Energy and Power Engineering, Changsha University of Science and Technology, Changsha 410004)
Abstract:Due to the slippery roads in the forest area and the complicated road conditions, the anti-lock braking system using the traditional control method has problems such as slow response speed, poor robustness, and poor braking effect. In this paper, the control method combining RBF neural network and sliding mode variable structure is proposed, and the analysis model of truck braking condition in forest area is established. The experimental results show that compared with the conventional sliding mode variable structure control, the system braking time based on RBF sliding mode variable structure control is reduced by 0.185 seconds, and the braking distance is shortened by 1.88 meters. The time to reach the optimal slip ratio and the maximum braking torque is faster and the system is more stable. Therefore, the method can not only weaken the chattering phenomenon caused by the conventional sliding mode variable structure control, but also improve the response speed and robustness of the ABS, and can well adapt to the wet and complex road conditions in the forest area. The feasibility and effectiveness of the designed model in practical applications are verified.
Keywords:Anti-lock braking system; radial basis function; neural network; sliding mode variable structure control; chattering
0引言
汽車防抱制动系统简称ABS系统,作用就是在汽车制动时,根据车轮转速自动管内压力的大小,让车轮处于边抱死边滚动的滑移状态,缩短制动距离,使方向保持良好稳定性的一种安全装置?[1]。ABS系统的作用决定了它必须具有较强的鲁棒性、实时性和抗干扰能力。目前,汽车防抱制动系统的控制方法有多种,其中主要的控制方式有:逻辑门限控制、PID控制、模糊控制、滑模控制和神经网络等?[2]。
当前国内外的ABS系统大多采用逻辑门限值控制方法?[3-4]。逻辑门限值控制算法虽然简单,但是需要大量实验获得,对本文所研究的林区复杂路面的适应性差,控制效果不是特别理想。以滑移率为控制目标,更容易实现不间断控制,提高制动过程的平稳性。实现连续控制最简单的算法就是PID控制?[5],但由于控制过程具有非线性、时变性和不确定性,PID算法也难以实现。滑模变结构控制作为一种非线性控制方法,能够很好的满足本文所需的要求?[6],但是由于滑模控制器非线性特点使得系统控制信号会产生抖振,高频抖振还有可能激励起系统中固有振荡源,对系统造成更大地影响?[7]。
公式(8)、(10)、(11)代入公式(12)可得制动执行器的数学模型:
Tb=k·Ik-Tm
(13)
其中,
k=9.55·2?π?·Ke·i·ηX·ηS·Kp·/Ph,
Tm=kp·Nm。
2基于RBF滑模控制器的设计
单轮车辆数学模型(1)可写为:
=RFf-Tb/J?v=-Ff/m。(14)
结合公式(13),上式整理为:
=μBτb-τiueq+τm?v=-μBg。 (15)
其中,τb=RFn/J,τi=k?/J,τm=Tm,ueq=Ik。
公式(2)对时间求导得:
λ=-Rv+Rωv?2v。(16)
定义滑模面为:
Sλ,t=?d?s?d?t+δ?n-1e。(17)
这里,e=λ0-λ(λ0为道路最佳滑移率,λ为实际滑移率),δ为待设计正常数(一阶系统中δ不做讨论)?[19-20]。
在一阶系统中n=1,因此?[19]:
S=e=λ0-λ。(18)
当系统在理想状态下沿着滑模面滑动时:?S?=0,求导得:
S=-λ=0。(19)
将公式(15)代入 公式(16),得:
λ=Rv?2-μBgω-vμBτb+vτiueq-vτm。 (20)
把公式(20)代入公式(19)得:
S=-λ
=Rv?2μBgω+vμBτb-vτiueq+vτm=0。(21)
整理公式(21)可得到等效控制量:
u∧eq=μ∧Bgωvτi+μ∧Bτbτi+τmτi。(22)
其中,μ∧B为μB最大时的控制量。
若切换控制量选取为:
us=β?sgn?S。(23)
其中,β>0,则系统状态总能在有限时间内到达滑动模态St=0。
在公式(23)中:
sgn?S=1S>0?-1S>0。(24)
因此,最终滑模控制器设计为:
u=u∧eq+us。(25)
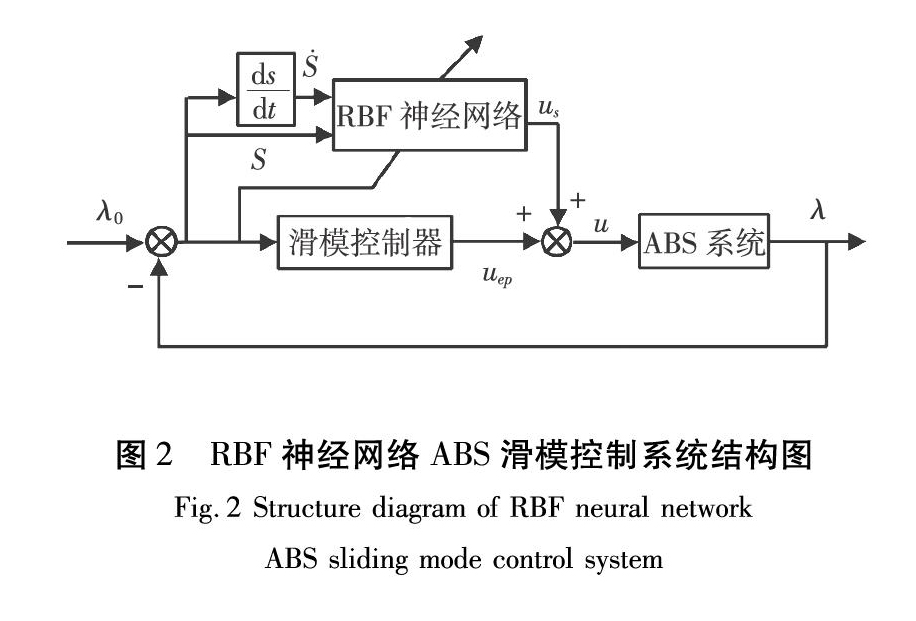
当出现诸如模型不匹配和未建模动态等问题,使系统轨迹偏离滑模面时,系统通过us=β?sgn?S切换控制使系统轨迹趋向滑模面。通过RBF神经网络,对切换控制中β值进行在线实时调整,使β值尽量减小,从而削弱系统的抖振。其控制系统方框图如图2所示。
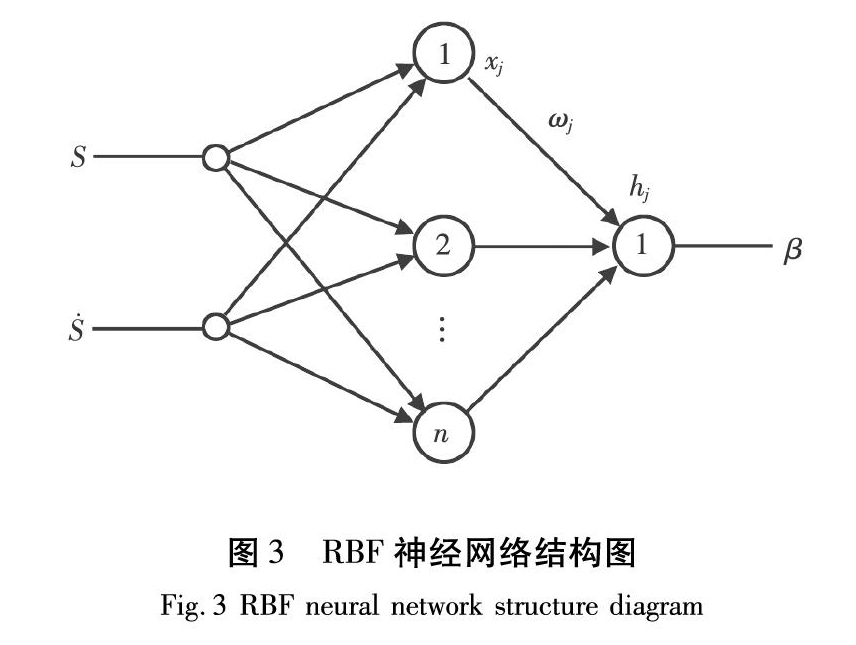
图2中,滑模控制器用来产生等效控制ueq,RBF神经网络用来调整切换控制中的参数β值。RBF神经网络结构如图3所示。
在图3中,输出结点hj由中间节点xj经过权值ωj得到。则结点hj的输出为:
β=?Σ?jxjωj。(26)
根据滑模控制原理 ,控制目标选为St·St→0,则RBF神经网络的权值调整指标为:
E=St*St。(27)
由公式(27)得:
d?ωj=-α?E?ωj=-α?StStωj
=-α?StSt?βt?βt?ωj。(28)
式中:α为神经网络调整步长。
StSt?βt=St?St?βt=-bSt。(29)
βt?ωjt=?exp?-‖S-cj‖?2/bj。(30)
由公式(26)~公式(30)可得,RBF网络权值增量值为:
dωj=γSt?expexp?-‖S-cj‖?2/bj
=γSthjS。 (31)
进而可给出权值调整算法为:
ωjt=ωjt-1+?d?ωjt+
αωjt-1-ωjt-2?。 (32)
3仿真及结果分析
仿真模型参数见表1~表3。
神经网络采用2个输入节点分别为滑移率误差S及其变化率S;采用最大矩阵元法确定40个隐层节点;1个输出节点为系统切换控制量us。隐层采用高斯函数,输出层采用线性函数。
汽车ABS系统总体仿真模型如图4所示,仿真结果如图5~图8所示。
图5~图8中,红线为基于RBF神经网络的滑模控制器控制效果,绿线为普通滑模控制器的控制效果。从图5速度曲线中可以看出:车速从初始制动速度20 m/s(66.7 rad/s)降到0m/s过程中,采用常规滑模控制器的ABS系统制动时间约为2.598 s,采用基于RBF滑模控制器的ABS系统制动时间约为2.413 s,制动时间减少了约0.185 s;图6的滑移率曲线可以看出:采用基于RBF滑模控制器的系统比采用常规滑模控制器的系统到达最优滑移率的时间减少了约0.087 s;图7的制动力矩曲线可以看出:采用基于RBF滑模控制器的系统比采用常规滑模控制器的系统稳定于最大制动力矩的时间减少了0.175 s;图8的制动距离曲线可以看出:采用常规滑模控制器的ABS系统的制动距离约为25.75 m,采用基于RBF滑模控制器的ABS系统的制动距离约为23.87 m,制动距离減少了约1.88 m。仿真结果表明:采用基于RBF的滑模控制器的系统的响应速度更快,系统更稳定,控制效果更优。
4结束语
滑模控制具有算法简单、对模型要求低、响应速度快以及鲁棒性强等优点,非常适合林区作业货车的控制要求。但由于其非线性的特性使得控制信号会产生高频抖振。本文从削弱抖振的角度出发,利用神经网络算法的自学习能力,设计了新的林区货车ABS滑模变结构控制器,通过仿真实验结果分析,验证了本文所设计的控制算法在林区货车ABS控制中的有效性。
【参考文献】
[1]黄锐,王森,乔华.浅析汽车制动防抱制动系统(ABS)[J].时代汽车,2018(7):133-134.
HUANG R, WANG S, QIAO H, et al. Analysis of car brake anti-lock braking system(ABS)[J]. Times Car, 2018(7): 133-134.
[2]凌滨,宋梦实,邢键,等.基于模糊PID的汽车防抱死制动系统[J].计算机仿真,2018,35(10):166-170.
LIN B, SONG M S, XIN J, et al. Automobile anti-lock braking system based on fuzzy PID[J]. Computer Simulation, 2018, 35(10):166-170.
[3]CHUN K, SUN W M. Wheel slip control with moving sliding surface[J]. IEEE Transaction on Automotive Technology, 2004, 5(2):23-133.
[4]GLAVIC M. Design of a resistive brake controller for power system stability enhancement using reinforcement learning[J]. IEEE Transaction on Control System Technology, 2005, 13(5):743-751.
[5]張策.基于MATLAB仿真的数字PID控制器设计方法[J].森林工程,2015,31(6):85-88.
ZHANG C. Design method of digital PID controller based on MATLAB simulation[J]. Forest Engineering, 2015, 31(6):85-88.
[6]尹凤杰,井元伟,杨晖.基于模糊滑模控制的主动队列管理算法[J].东北大学学报:自然科学版,2006,27(5):473-476.
YIN F J, JIN Y W, YANG H. Active queue management algorithm based on fuzzy sliding mode control[J]. Journal of Northeast University, Natural Science Edition, 2006, 27(5):473-476.
[7]宋文龙,杨鑫,贾鹤鸣.采摘机械臂的滑模PID控制[J].森林工程,2013,29(2):74-76.
SONG W L, YANG X, JIA H M. Sliding mode PID control of picking manipulator[J]. Forest Engineering, 2013, 29(2):74-76.
[8]张强.基于线控技术的防抱死制动系统研究[D].长沙:湖南大学,2013.
ZHANG Q. Research on anti-lock braking system based on wire control technology[D]. Changsha: Hunan University, 2013.
[9]付长胜.汽车ABS系统优化及关键技术研究[D].赣州:江西理工大学,2016.
FU C S. Research on optimization and key technology of automobile ABS system[D]. Ganzhou: Jiangxi University of Science and Technology, 2016.
[10]丁凡一,孙振伟,李智鑫,等.基于51单片机的轮胎自动加气装置[J].林业机械与木工设备,2017,45(2):46-48.
DING F Y,SUN Z W,LI Z X, et al. 51SCM-based Automatic Tire Inflating Devices[J].Forestry Machinery & Woodworking Equipment,2017,45(2):46-48.
[11]边明远.用于纵向道路附着系数评估的简化轮胎模型[J].重庆理工大学学报,2012,26(1):1-5.
BIAN M Y. Simplified tire model for evaluation of longitudinal road adhesion coefficient[J]. Journal of Chongqing University of Technology, 2012, 26(1):1-5.
[12]边明远,李克强.基于双指数模型的纵向附着系数计算模型[J].农业机械学报,2005,36(5):5-8.
BIAN M Y, LI K Q. Calculation model of longitudinal attachment coefficient based on double exponential model[J]. Journal of Agricultural Machinery, 2005, 36(5):5-8.
[13]彭晓燕.汽车线控制动系统安全控制技术研究[D].长沙:湖南大学,2013.
PENG X Y. Research on safety control technology of automobile wire brake system[D]. Changsha: Hunan University, 2013.
[14]陈思成,陈劭,杨越.森林消防车制动安全性评价与试验研究[J].林业机械与木工设备,2015,43(11):10-13.
CHEN S C,CHEN Z,YANG Y. Forest fire engine braking safety evaluation and experimental research [J].Forestry Science & Technology,2015,43(11):10-13.
[15]徐雯静,宋蛰存.永磁同步电机一种新型滑模观测器的设计[J].森林工程,2014,30(6):75-79.
XU W J, SONG Z C. Design of a new sliding mode observer for permanent magnet synchronous motor[J]. Forest Engineering, 2014, 30(6):75-79.
[16]陳昌荣.基于滑移率的车辆线控制动系统ABS控制研究[D].长沙:湖南大学,2010.
CHEN C R. Study on ABS control of vehicle brake system by wire control based on slip ratio[D]. Changsha: Hunan University, 2010.
[17]沈沉,王军,林逸.电子机械制动系统制动执行器建模与试验[J].农业机械学报,2007,38(8):30-33.
SHEN C, WANG J, LIN Y. Modeling and test of brake actuator in electro-mechanical braking system[J]. Journal of Agricultural Machinery, 2007, 38(8):30-33.
[18]张文海.用反电势系数计算直流力矩电机堵转转矩的公式[J].微特电机,2004(4):45-46.
ZHANG W H. A formula for calculating the torque of DC torque motor by using the back EMF coefficient[J]. Micro Special Motor, 2004(4):45-46.
[19]张静,裴雪红.基于RBF在线辨识的PID整定[J].电机与控制学报,2009,13(1)157-160.
ZHANG J, PEI X H. PID tuning based on RBF online identification[J]. Journal of Motor and Control, 2009, 13(1):157-160.
[20]裴雪红.基于改进RBF神经网络的PID控制[D].哈尔滨:哈尔滨理工大学,2010.
PEI X H. PID control based on improved RBF neural network[D]. Harbin: Harbin University of Technology, 2010.
[21]李岩,苏学军.基于模糊径向基函数神经网络的PID控制算法仿真研究[J].自动化与仪器仪表,2014(9):1-2.
LI Y, SHU X J. Simulation of PID control algorithm based on fuzzy radial basis function neural network[J]. Automation and Instrumentation, 2014(9):1-2.
- 人体工程学在酒店室内设计中的应用研究
- 新媒体视阈下视觉传达设计的视觉结构分析
- 基于UE4的SLG植物养成手机游戏设计与实现
- 互联网环境下地域特色软装饰产品的设计及推广研究
- 高校文创产品设计开发研究
- 食品包装安全链的系统化设计方法探析
- 传统门窗雕刻艺术在室内空间设计中的应用
- 木偶艺术人才培养的现状与未来发展趋势思考
- 略谈戏曲现代戏的表演
- 试论潮剧传承的意义
- 民族音乐对于群众文化建设的价值分析
- 浅谈亳州民俗剪纸的文化内涵
- 浅谈戏曲表演艺术的传承创新
- 略谈“八字舞”的舞蹈形式及语言
- 浅谈山东滕州莲花落子的艺术特点及发展
- 德宏傣族剪纸传统工艺的传承与文化嬗变
- 浅析当代工艺美术的价值取向
- 当代工笔人物画中表情的微观表达
- 笔墨当随时代
- 中国水彩画中表现“气韵”的载体
- 浅析金属材料在陶艺创作中的运用
- 艺术品拍卖市场探究
- 王希孟《千里江山图》的“精”与“境”
- 黑白照片的情感表达
- 关于雕塑艺术创作中的细节分析
- fords
- ford transit
- ford²
- ford¹
- fore
- foreact
- fore-aft
- fore-against
- fore-alleged
- forearm
- forearmed
- forearming
- forearms
- forearms'
- forebear
- forebears
- forebell
- forebitter
- foreboding
- forebodingly
- forebodingness
- forebodingness'
- forebodingnesses'
- forebodingnesses
- forebodingness's
- 突目
- 突眼的青蛙
- 突破
- 突破了包围
- 突破几层包围
- 突破原有的例规、习惯、状况等
- 突破口
- 突破常例
- 突破常规
- 突破束缚
- 突破而穿越
- 突破而越过
- 突破进入
- 突破重重障碍和困难
- 突磨
- 突秃
- 突突
- 突突哝哝
- 突突囔囔
- 突突抹抹
- 突突的
- 突立
- 突羽
- 突胸
- 突荡