林舒静 郑誉煌
摘 要:本文提出一种多关节机械臂的结构设计,并运用SolidWorks对提出的机械结构进行受力分析与驱动力分析。实验证明,这种设计方法是可行的。
关键词:驱力分析;SolidWorks;机械臂
DOI:10.16640/j.cnki.37-1222/t.2019.21.100
1 引言
在德国工业4.0的大背景下,以及中国顺应时代潮流提出的制造2025规划带动下,各国逐渐开始展开工业环境下的机械臂的相关技术的研究。机械臂作为一种自动化程度高,能够代替人工作业的可重复作业的装置被普遍应用于工业生产加工的各个领域中[1,2]。现有的工业机械臂虽然五花八门,用来满足工业领域上不同方面人的要求,但是很多的都价格昂贵,结构复杂,不能让初次接触工业机器臂的人很好的了解机械臂或者工业机械臂走进平常百姓家,也并不能讲机械臂单纯的用以艺术传作或者将它做成一个物美价廉的工艺品或者单一表演用的机械臂。为此我们研发出一款不需要精度太高并且具有有效承重且价格便宜的机械臂。用来满足上述要求[3,4]。
2 多关节机械臂的设计
2.1 设计方案
为了让我们的机械臂能更加普及并且达到多关节机械臂的概念,我们设计的多关节机械臂需要三轴以上,这样的话我们需要选取三个以上的电机。我们的机械臂同时需要具备承重的特点,原有多关节机械臂的机械结构方案可以给我们起到一定的参考作用,将电机在满足了驱动力要求的情况下进行简单的组装。
2.1.1 丝杆滑台
丝杆滑台它的承重比较大,本身重量也比较大,适合将丝杆滑台电机放置在多关节机械臂的最下端,既能将我们设计的多关节机械臂的重心下移,我们预计放置在丝杆滑台上面的两个电机的重量大概是2KG。我们可以选取有效行程在250mm,总长444mm的丝杆滑台,它的负载和他的运动过程的水平和垂直速度的最高值有关。我们选择驱动的电机型号是:FM576SFD04。
2.1.2 两相步进电机
根据我们所要研发制作的多关节机械臂是在家庭用电下进行使用的,并且应该具备自转和反转的能力,由此我们选择两相的步进电机即可。选择电机型号是57HS22,驱动电流是3A,出线方式是两相四根引出线。
2.1.3 减速机
减速器是一种低速、高扭矩的传动装置。它能通过大小齿轮的齿数之比来将电动机的速度转化为动能,具有减速机的步进电机力矩比较大,我们将其放置在设计的多关节机械臂的最末端,用于进行负载。
还有其他一些电路的应用元件就不一一详述了。
2.2 机械结构建模
2.2.1 SolidWorks概述
SolidWorks是世界上第一个基于SolidWorks的三维物理设计软件。该软件以参数化特征建模为基础,具有强大、易学、易用、技术创新等特点,使固相技术成为主流的领先3d cad解决方案。
2.2.2 SolidWorks模型建立
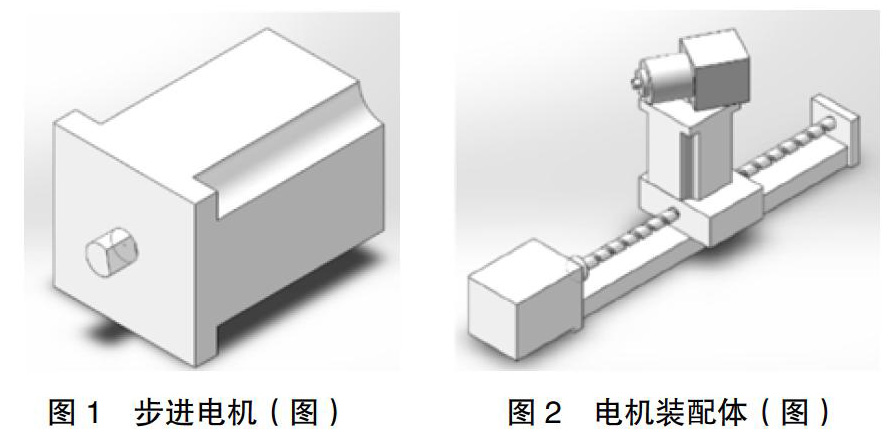
我们建立电机的模型,进行电机的受力分析,然后将电机组装起来后进行整体的受力分析。两相步进电机图1,图2为三个电机的简单结合体。
2.3 机械结构的结构分析和驱动力分析
2.3.1 两相步进电机受力分析[5,6]
在SolidWorks中我們只需要对三个电机中的步进电机(两相)进行受力分析,用以验证理论的可行性,这种分析也称为应力分析,受力分析在SolidWorks中通常运用的方法叫做有限元分析法。通过SolidWorks进行建模应力分析,可以分析其机械结构是否稳定,是否能够承受多关节机械臂在运作过程中所产生的力,是否会在工作过程中受到破坏。我们在进行应力分析时需要确定哪些面是固定的,哪些面是可移动的,对其增加约束和载荷,还需要定义模具的材料才可以进行受力分析,因为每一种材料都是它的弹性系数、密度、屈服强度都是不同的。
我们选择SolidWorks中自带的插件SolidWorks simulation express,它为用户提供了一个简易的、逐步的设计分析方法。用户只要按照向导设置好用于零件分析的信息,如材料、约束和载荷,这些信息代表了模具在实际应用时的情况。在模型中如果模型结构在运行过程中会不稳定,那么就会出现高亮的颜色,也就是我们所说的安全系数,安全系数为1时,表明模型是安全可靠的。
两相步进电机受力分析:
从上面图3、图4中显示的,电机它的安全系数图都全是蓝色的,表明在这个机械结构中是能够承受运作过程中的力不超过其弹性系数,没有发生形变,并且所有的模型其安全系数也为1,也就是说明我们的机械结构设计是合理的,虽然理论与实际存在偏差,但在理论先行的情况下是证明了本实验设计的机械结构是合理的。
2.3.2 两相步进电机驱动力分析
选取的两相步进电机的扭矩是2.3N.M的,并且力是直接作用在电机上,参照图4上显示的数值,发现电机完全能够在我们设计的机械结构中进行正常运作。由图可得两相步进电机轴收到的最大的力才是3.580×105N/m2。
3 小结
本文所设计的机械结构用SolidWorks验证了在理论上是可行的。实验中,本机械机成功用于舞龙机器人上面,也证实了该机械结构能实际运用操作,并且能满足多关节机械臂中多关节需要机械臂具有三轴以上的要求。
参考文献:
[1]周恩德.移动导轨式6R喷涂机器人的结构分析与仿真研究[D].华南理工大学,2017.
[2]李海龙.六轴工业机械臂的结构设计与轨迹规划[D].安徽理工大学,2018.
[3]武洋.6-SPS并联机器人运动仿真与控制系统设计[D].江苏理工学院,2018.
[4]古家希.工业机械臂结构设计要点和性能探究[J].山东工业技术,2018(06):22.
[5]陈榕婷,叶泳仪,杨柳娟,李金林,郑誉煌.基于Solidworks的四足机器人的步态分析[J].科学技术创新,2019(07):70-71.
[6]叶泳仪,陈榕婷,林耿娇,李金林,郑誉煌.基于SolidWorks的四足机器人模型建模与仿真分析[J].福建电脑,2019,35(02):18-21.
基金项目:2017年度广东省本科高校高等教育教学改革项目“电子信息工程专业新工科人才培养的研究与实践”;2018年度广东第二师范学院电子信息工程应用型人才培养示范基地项目(项目编号:2018sfjd02)
作者简介:林舒静(1996-),女,广东茂名人,本科,助理工程师,研究方向:3D设计。
*为通讯作者
- 信阳知识产权强市建设发展存在的问题及推动策略研究
- 知识产权快速维权中心建设与运行机制研究
- “宛艾”产业知识产权纠纷案发展始末
- 聚焦知识产权 共谋高质量发展
- 武汉发布2019年知识产权发展状况白皮书及保护知识产权十大典型案例
- 河南印发2020年知识产权工作要点
- 知识产权维权援助服务已经实现全国整合
- 2020年商标审查工作会议在京召开
- 毫不松懈抓好知识产权“四有”运用助力复工复产
- 提升知识产权运用效益 掌握高质量发展主动权
- 测绘新技术在第三次全国国土调查中的应用
- 地质测绘质量的影响因素和提升策略研究
- 三亚市育才生态区某村边坡崩塌地质灾害特性及治理方案
- 重庆市万盛地区大气12月份PM10污染预测分析
- 论地籍测绘对东乌珠穆沁旗自然资源管理的重要性
- 南阳市雾霾天气时空分布与能见度变化特征分析
- 农村土地所有权确权中测绘的应用
- 单轴压缩测试条件下泥岩的力学特性综述
- 基于CDEGS的牵引变电所回流不畅分析及解决措施
- SDS-PAGE法分析蜂蜜中蛋白质组分的条件优化
- 不同原子比对固相反应制备方钴矿电学性质的影响
- 变电站一键顺控改造技术的试点研究
- 新能源汽车技术评估指标体系研究
- 碳纤维FSS应用于蜂窝夹层吸波材料
- JSQ6型车辆驼峰溜放调车作业方案的研究与应用
- tortoise
- tortoise-like
- tortoises
- tortuous
- tortuously
- tortuousness
- tortuousnesses
- torturable
- torture
- torturedly
- torturer
- torturers
- tortures
- torturesome
- torture²
- torture¹
- torturing
- torturingly
- tory
- torydom
- toryishly
- toryism
- toryize
- to sb's face
- to some extent
- 逸歌
- 逸步
- 逸毫
- 逸民
- 逸气
- 逸气横生
- 逸水
- 逸游
- 逸游自态
- 逸漏
- 逸灵
- 逸照
- 逸牛
- 逸犯
- 逸珠
- 逸璞
- 逸盗
- 逸目
- 逸禄
- 逸福
- 逸禮
- 逸禽
- 逸秀
- 逸窜
- 逸笔