李欣原 聂子杰


摘要:随着人们对生活质量要求不断提高,家庭机器人渐渐走入百姓家。家庭功能性机器人需求日益增长,不同的需求需要数个专门机器人分别实现,对家庭空间和经济状况都有较高要求,成为机器人铺开的一大阻力。文章设计了一款多用途家庭服务机器人SuperCare。通过三类主要机械电气装置的组装结合,能实现机器人的人车双形态变化。SuperCare机器人同时满足搬运重物、抓取物品、儿童娱乐的需求,降低人们家务劳动强度。在满足多种家居智能化需求的同时减少不必要经验资源与家庭空间的占用。该机器人能帮助现代人提高家居生活品质,也为下一代集成机器人在人机交互设计上提供了新思路。
关键词:家庭服务 机器人 少年儿童 设计人工智能
中图分类号:TP242.6 文献标识码:A
文章编号:1003-0069(2021)02-0102-04
引言
随着人类经济社会的不断发展、物质文明的不断提升,人们的生活水平不断提高,对生活家居的质量要求也不断提高【1】。使用机器代替人来完成家庭中的清洁卫生、物品搬运、儿童教育、家电控制等任务,将人们从繁杂的家务中接触放出来,成了当下越来越多人的生活理念。除此之外,近年来人类科技的突飞猛进也使得越来越多的智能家庭机器人从科幻作品以及概念设计,走入寻常百姓的家中,人们对于家庭机器人的接受程度大大提升。未来几年内婴幼儿的数量将持续增加,家庭中少年儿童的看护陪伴便显得尤为重要。
目前的家庭服务机器人功能较为单一,需要配置多个机器人才能满足人们的需求,成本较高。此外,家庭中仍有许多体力劳动如搬运重物等,在日趋智能化、自动化的当下,人们迫切希望这些工作能够由机器完成。
中青年对于生活便利性服务的期望大多来自家务活类,如扫地、搬重物、擦玻璃等,也有生活质量方面,如衣服的筛选、整理等。对于3-7岁的孩子们娱乐的方式主要有玩遥控车、玩积木、过家家等。而孩子们对于娱乐方式更多的是会选择多的种类,单一的娱乐方式很容易让孩子们产生厌倦心理。为此,我们提出并设计一款新型家庭服务机器人,在家务上不仅能提供日常的便利服务,还能提供一些个性化的便利服务,以满足中青年高品质的生活要求。同时,在孩子们的娱乐方式上,通过人机交互和一些机械的辅助,帮助孩子们在家庭中完成更多的,属于他们的娱乐项目,如图1。
一、设计意义
本设计倾向于机器人的机械结构设计,通过结合功能进行项目结构的详细设计,由功能出发,采用“自顶而下,逐步求精”的设计思想【2】,设计了三大功能模块,再由此出发进行详细的结构设计。最后,本文针对实际情况,使用inventor对机器人进行了设计和分析、包括机械手运动设计、机械腿运动设计,各种传动机构的设计。对不同的机构进行组合创新、应用创新,最终实现预期目标。其具体设计功能特点在于:
1.在人形机器人状态下,机器人的移动方式为站立行走,大型机械臂可以帮助家庭成员搬运较重的物品或者把一些物品移动到人手难以到达的高处;小型夹持机械手则能够帮助家庭成员完成较小物品的拿取、移动,如递水杯、夹衣服等运动。
2.当机器人不被使用,处于静止状态时,其机械腿将弯折至一定角度并锁死,机械臂自动摆放至水平,整个机器人呈椅子形态,可供家庭成员使用、休息。
3.在车形机器人状态下,机器人的移动方式为轮胎移动,家庭中的儿童可騎在机器人的背部,机器人作玩具车供儿童娱乐。小型夹持机械手旋转至竖直,使用者可在背上抓住机械手,以防止意外滑落。
家庭中使用本机器人,人们可以减轻家中体力劳动量,让儿童得到陪伴与娱乐,提高生活幸福感与品质。
二、设计内容
(一)整体设计
SuperCare家庭服务机器人针对家庭实际场地、人体实际常规尺寸以及家庭服务需求进行了创新性设计,并采用模块化设计思想,增强了机器人的实用性与功能性。本机器人主要实现对重物的搬运功能、对普通物品的夹取移动功能以及陪伴儿童的娱乐功能。本机器人共分为两种模式,一种是人形机器人状态,一种是车型机器人状态。两种模式的整体模型图如图2、3所示:
(二)机械臂设计,如图4
机械臂模块主要分为五部分:上机械臂、下机械臂、驱动轮胎、液压连接机构以及机械爪。由于本结构主要负责较重物品的搬运,因此采用液压驱动作为主要动力,增强机械臂的负载能力,当机械臂搬运重物时,机械臂上的小型油泵从装置总油池中抽取液压油,驱动机械臂进行运动。除此之外,上机械臂与下机械臂之间还采用弹簧阻尼杆进行辅助连接,通过PID算法确定该系统中MKC的具体值,确保机械臂响应的快速性、稳定性、准确性。机械爪的驱动则选择普通步进电机配合斜齿、锥齿轮传动系统,以提高机械手运动的精确性和平稳性,保证安全、准确地夹取所需物品【3】,如图5。
通过机械臂的机构原理图可以清晰地看出机械臂的自由度以及各零件部件之间的运动关系,整个机械臂与身体部分之间的旋转运动通过电机驱动,行星齿轮减速机构进行降速以及旋转,行星减速器体积小、重量轻,承载能力高,使用寿命长、运转平稳、噪声低的特点,动力由电机主轴输出至减速器的太阳轮,太阳轮带动环绕其周围的三个行星轮转动,减速器的最外圈是一个固定的内齿轮,三个行星轮与之啮合并围绕其中心作公转运动,行星轮带动一个三爪行星架绕中心进行旋转,三爪行星架的另一端与机械臂相连,当电机旋转时,机械臂将以所设定减速比而得到速度进行旋转。该部分的模型图如图6所示:
机械臂的驱动轮胎部分位于下机械臂的前端,机械爪的后方,通过电机配合直齿与锥齿轮减速装置将其带动,传动比精准,位移准确4。轮胎表面的人字形设计可以增大轮胎与地面之间的摩擦力,保障车体的安全行驶,该部分齿轮传动的传动机构见图如图7所示:
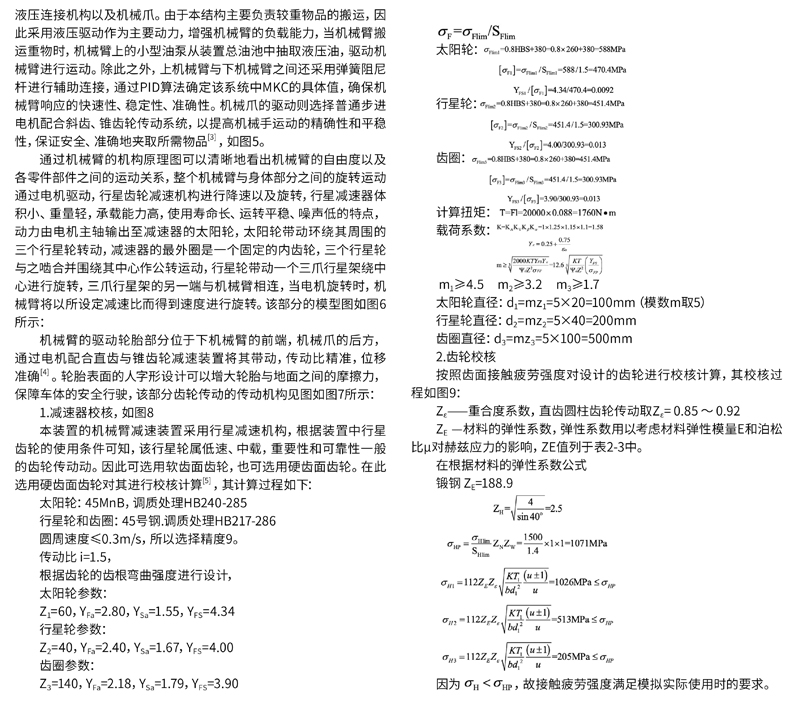
1.减速器校核,如图8
本装置的机械臂减速装置采用行星减速机构,根据装置中行星齿轮的使用条件可知,该行星轮属低速、中载,重要性和可靠性一般的齿轮传动动。因此可选用软齿面齿轮,也可选用硬齿面齿轮。在此选用硬齿面齿轮对其进行校核计算5,其计算过程如下:
太阳轮:45MnB,调质处理HB240-285
行星轮和齿圈:45号钢.调质处理HB217-286
圆周速度《0.3m/s,所以选择精度9。
传动比i=1.5,
根据齿轮的齿根弯曲强度进行设计,
太阳轮参数:
Z=60,YFa=2.80,Ysa=1.55,Ys=4.34
行星轮参数:
Z,=40,YF.=2.40,Ysa=1.67,Yps=4.00
齿圈参数:
Z,=140,Y=2.18,Ys.=1.79,YFs=3.90
m>4.5m,>3.2m;>1.7
太阳轮直径:d=mz;=5X20=100mm(模数m取5)
行星轮直径:d,=mz=5X40=200mm
齿圈直径:dz=mz=5X100=500mm
2.齿轮校核
按照齿面接触疲劳强度对设计的齿轮进行校核计算,其校核过程如图9:
Ze——重合度系数,直齿圆柱齿轮传动取Z=0.85~0.92
Z——材料的弹性系数,弹性系数用以考虑材料弹性模量E和泊松比u对赫兹应力的影响,ZE值列于表2-3中。
在根据材料的弹性系数公式
锻钢Z=188.9
因为0《o,故接触疲劳强度满足模拟实际使用时的要求。
(三)机械手设计,如图10、11
夹持机械手主要由电机、齿轮组、液压推杆、连杆机构以及输油液压管道组成,主要负责夹取小型物品如水杯、眼镜或衣服等【6】。摇杆机构可以使整个机械手的前端全部旋转,由较大的电机所驱动。另外,有两个小型电机分别驱动两个小齿轮,小齿轮将动力传递到蜗杆上,蜗杆带动涡轮转动,从而带动整个机械爪的一开一合。
为具体了解机构在真实运动环境下的运动状态,故选取机器人抓取机械手中的曲柄滑块机构进行运动仿真7。
赋予曲柄(红色)一均匀的角速度,便可带动滑块(黄色)在导轨上做周期性往复运动,各约束条件设定完成后,通过运动仿真功能对其进行仿真,运动仿真输出图示器生成曲线如图12所示,蓝色为滑块上一点的运动速度,红色曲线代表该点的位移,绿色曲线则代表该点的加速度。设置曲柄的旋转速度为30deg/s,得到的轨迹是周期为10,幅值为40的正弦线,表明该机构设计合理。
(四)机械腿设计,如图13
机械腿是本机器人的特殊结构之一,既能满足行走,又能满足轮子行驶。其外观图如图所示,机械腿的结构包括主支撑大腿,小腿,小腿车轮和脚,以及各个部位的连接机构部分。
大腿与主体间的转动传动方式采用行星轮减速器,以达到较高的平稳转动效果,满足机器人在变形过程中的平稳性。大腿和小腿间的连接部分装采用液压弹簧连杆转动机构,提高了机器人承重能力和受冲击能力。连接机构的部分装于大腿与小腿之间,既不会对整体模型造成外形的累赘,又能较好实现承重功能。同时在变形成小车形态后,能作为车轮支撑并实现一定悬挂的缓冲效果,大程度避免了机器人受到冲击时给机器人小腿带来大的冲击,有效延长机器人寿命,提高使用者的乘坐体验。
小腿尾部安装车轮,作为机器人变形为车形态后的主动轮,其驱动力来自装于小腿内侧的直流无刷电机,如此设计结构紧凑,可提高传动效率,同时对小车变形平稳性上也有一定的改善。小腿连接足部,通过液压阻尼推杆实现机器人行走过程中的冲击缓冲。阻尼液压支撑双杆机构,通过曲柄的导引,实现脚的转动。同时,液压杆能实现在行走过程中,通过推杆直接将力传递至阻尼液压器上,能通过阻尼器延长反力作用时间,将等量的冲量进行缓冲,减少电机直连足部时给足部的刚性冲击。腿部的整体机构原理图如图14所示:
腿部的行走机构由曲柄摇杆机构完成,通过对摆杆进行加长折弯设计,实现腿部行走的基本过程,优化曲柄尺寸,将曲柄尺寸设计为52mm,连杆尺寸设计为210mm,大程度减小曲柄摇杆机构配合时的变动程度,提高行走的平稳性。这样设计,不仅能优化机器人整体结构的紧凑性,对机器人腿部的支撑稳固性也相对较高,大腿与小腿的连接适应性上也会更合理8。
除此之外,考虑到腿部的电机、传动系统、液压系统较多,设计时充分考虑了装置的散热条件,腿部多处外壳采用镂空多孔设计,保证系统能够正常散热。
接下来对重要零件连杆进行设计校核:
连杆是大机械腿与小机械腿间的连接件,承接装置小腿以上部分的重力与扭矩,将连杆零件的模型导入AutodeskInventor软件中的应力分析单元,对其进行应力分析,设定初始参数即材料的性质以及软件的基础参数,如表1。
通过受力分析可知,连杆主要受沿轴线方向的压力和作用于轴孔的扭矩,在应力分析界面中对模型添加合适的约束与载荷,如表2、图15。
经过分析可得到分析结果与应力分布图,如表3、图16:
由仿真分析的数据及变化图可知,当给定所加载荷时,材料所产生的应力仍在材料的承受极限范围内,应变较小,设计满足要求。
(五)主体座椅设计,如图17
主体座椅模块主要包括座椅的靠板以及垫板,腿部传动轴的连接座体,背部固定支架以及顶部的摄像头组成。当机器人处于人形状态时,座椅底板3处于平放状态,家庭成员可以坐在上面进行休息;当机器人处于车形状态时,座椅靠板1则处于水平状态,家庭中的儿童可以骑在上面将其作为玩具车进行娱乐。主體座椅模块作为整个装置的中间组成部分,要承受来自上下两部分的载荷,因此需要稳固的结构保证其强度,通过INVENTOR软件自带的应力分析功能可以对其进行分析。除此之外,主体座椅的背后安装有弹簧阻尼减震器,可以提高装置整体的承载能力,保证了机器人运动时的安全,也可以提高用户在乘坐时的舒适程度以,如图18。
座体是位于机器人中部的重要连接件,负责连接整个机械腿部分和躯干部分,主要承受上半部分装置的重力以及传动轴产生的扭矩,将座体零件的模型导入AutodeskInventor软件中的应力分析单元,对其进行应力分析,设定初始参数即材料的性质以及软件的基础参数,如表4。
由受力分析可知,座体主要受来自上表面的压力以及两端连接轴处的扭矩作用,在应力分析界面中对模型添加合适的约束与载荷,如表5、图19。
经过分析可得到座体的受力分析结果与应力分布图,如表6、图20:
由仿真分析的数据及变化图可知,当给定所加载荷时,材料所产生的应力仍在材料的承受极限范围内,应变较小,设计满足要求。
(六)智能控制模块
机电一体化和智能控制已经成为当今机械行业的重要发展趋势,且随着各种智能家居的兴起,家用电器之间的协同工作也变得越来越重要。为实现本家庭服务机器人的正常工作,防止机器在运行时出现与家具或家庭成员发生碰撞或用力大小不均等问题,在机器人内部安装智能控制模块,对机器人的运动路径、施力大小进行合理有效的控制0,下图为完成一次物品抓取的主要控制流程,如图21:
三、设计特点
(一)伺服电机配合齿轮传动保证机械臂和机械腿能够稳定、精准、快速地运动。(二)阻尼系统配合液压传动装置提高机器人的承载与运载能力。(三)机器人外形为椅子类家居设计,造型美观、装饰性强,易于推广。(四)智能摄像头自动规避前进路线上的障碍物,保障家庭成员安全。(五)模块化的组合式设计使机器人易于装配,同时也降低了机器人损坏的概率。
四、前景
本机器人造型美观,既是功能强大的家庭服务设备,也是一件装饰性十足的家庭组成部分。该机器人设计合理,各项设计均符合设计标准,安全可靠且功能丰富,具有较高的实用性能,在家庭设备日趋自动化且家庭服务机器人市场占有量极少的今天,本机器人具有广阔的市场化推广前景。
结语
本机器人优良的结构设计,保证其能够在协助家庭成员完成众多体力劳动的同时,还可作为家庭中青少年的保护与陪伴者,减轻了中青年家庭成员的劳动负担,保障了儿童的日常娱乐与安全。对未来家居机器人设计有参考意义。
参考文献
【1】桂圆圆.家庭服务机器人发展现状专利分析及发展趋势【J】.科技风,2018(22):5.
【2】贾宁.基于双目视觉的家庭机器人的目标识别与检测【J】.现代电子技术,2017,40(23):51-54+58.
【3】徐彦,方琴,张超,李鸿巍气动软体自折叠机械臂的驱动和负载性能【J】.浙江大学学报(工学版),2020,54(02):398-406.
【4】冯中澳,赵利达.一体式乒乓球发球机器人设计【J】.设计,2020,33(15):14-17.
【5】王跃,李忠华,文志华,魏喜明.电机齿轮减速器校核与优化【J】.中国家用电器协会.2018年中国家用电器技术大会论文集,2018(5):1281-1285.
【6】沈洪锐,李俊杰.自主路径规划的同步机械臂的研究与实现【J】.控制工程,2020,27(01):188-193.
【7】施佳裕,王忠,殷文元,夏骅.基于ANSYS的曲轴应力及变形敏感度分析【J】.机械设计与制造,2020(06):231-234+240.
【8】雷铭达,徐汉斌,基于老年人站立分析的辅助站立机构优化设计研究【J】.设计,2020,33(15):102-105.
【9】陈子轩.月球營地机器人设计【J】.设计,202033(1):11-13.
【10】张辰宇.基于嵌入式技术的机电设备控制装置的设计研究【J】.设计,2020,33(15):90-92
- 互联网+背景下微商与电商消费的对比研究
- 浅析五粮液关联交易问题
- 市场营销风险的成因及其预测探讨
- 论电子商务与传统商务的协同发展
- 江西省粮食安全中的涉农财政金融政策
- 农贸中心农产品流通环节存在问题与对策
- 大数据时代的商业模式创新研究
- ERP与CRM、SCM的关系研究
- 快速消费品包装效果对目标群体的消费影响研究
- 论桂台渔业合作方向与前景
- 重庆健康旅游发展探究
- 文化遗产旅游发展研究以大足石刻为例
- 涪陵区武陵山乡旅游扶贫浅析
- 新常态下黑龙江省现代服务业发展战略研究
- 新常态下黑龙江省经济面临的机遇与挑战
- 黑龙江省资源型城市旅游企业发展问题的探讨
- 黑龙江省三江地区科技型中小微企业的成长环境分析
- 关于农业市场经济的浅析
- 河北省在京津冀协同发展中的现状与问题分析
- 新经济时代的人力资源管理探微
- 试论人力资源配置及其作用与模式
- 企业社会责任前移视角下小微企业人力资源管理
- 浅析基于需求预测技术的内部人力资源市场配置管理
- 景区投资的风险防范
- 互联网金融下中小企业融资问题研究
- malignancies
- malignancy
- malignant
- malignantly
- maligned
- maligner
- maligners
- maligning
- malignly
- maligns
- malinger
- malingered
- malingerer
- malingerers
- malingering
- malingers
- mall
- mallard
- mallards
- malleabilities
- malleability
- malleability,malleableness
- malleable
- malleableize
- malleably
- 纂集成书
- 纂集派
- 纂集综合
- 纂集训释
- 纂集记载
- 纆
- 纆徽
- 纆牵长
- 纆索
- 纆缴
- 纇
- 纈
- 纊
- 續
- 續初
- 纍
- 纍纍
- 纏
- 纑
- 纑索儿
- 纑纑儿
- 纓
- 纕
- 纖
- 纘