摘要:移动对象轨迹已成为当前移动对象研究中关注的热点。移动对象的轨迹数据中存在着多种不确定性,如位置不确定性和时间不确定性。目前对于汽车轨迹的位置不确定性研究,多数都是针对当有轨迹点缺失时,如何确定两个汽车行驶轨迹点间可能经过的具体地点,而专门针对汽车在两个轨迹点间可能经过的路径,相关研究还不多。首先在詳细阐述汽车运动轨迹中不确定性的基础上,建立了一个基于椭圆的路网模型,然后综合考虑即时车流量和汽车通过路径花费的时间,提出了一个对可选路径的评分算法。利用该算法可以在部分轨迹数据丢失的情况下,较好地估计移动对象的真实路径。实验结果证明了该算法的有效性。
关键词关键词:汽车轨迹;移动对象;不确定性;轨迹估计
DOIDOI:10.11907/rjdk.162788
中图分类号:TP3-0文献标识码:A文章编号文章编号:16727800(2017)004000105
基金项目基金项目:国家自然科学基金项目(61003031);上海市工程中心建设项目(GCZX14014)
作者简介作者简介:侯瑞峰(1990-),男,河南新乡人,上海理工大学光电信息与计算机工程学院硕士研究生,研究方向为汽车轨迹数据、位置推荐;彭敦陆(1974-),男,上海人,博士,上海理工大学光电信息与计算机工程学院教授,研究方向为大数据管理、Web数据管理、位置服务。0引言
无线网络通信技术和全球定位技术的不断发展,为人们研究移动对象的运动规律提供了越来越多的技术支持。目前,在面向移动对象的位置服务技术中,汽车作为一种只能在路网中移动的特殊对象,对其轨迹的研究也得到了人们重视。众所周知,汽车在行驶过程中,由于受到多种因素影响,会导致获得的汽车运动轨迹数据存在一定程度上的不确定性,这种不确定性会影响后期数据分析的准确性。因此,人们针对汽车移动轨迹的不确定性进行了大量研究。导致汽车轨迹数据存在时空不确定性的原因很多,主要包括数据采集过程中产生的不确定性、轨迹数据记录过于稀疏(如汽车以60km/h的速度行驶,每2min记录一次汽车位置,这辆汽车在两个连续的轨迹点之间行驶的路程则是2 000m)、数据传输过程中带来的不确定性等[1]。在汽车运动轨迹中,最普遍的不确定性是时空不确定性[2]。时空不确定性又可分为空间不确定性和时间不确定性。
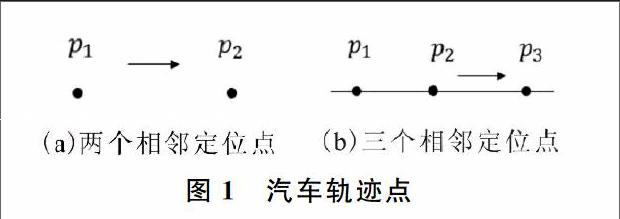
汽车轨迹的空间不确定性,又称为位置不确定性,在汽车的两个相邻轨迹点之间,不能确定这辆汽车经过的具体位置。如图1(a)所示,p1和p2是一辆汽车一条轨迹数据中的两个相邻轨迹点,在两个轨迹点之间,不能确定汽车的行驶路径。
汽车轨迹的时间不确定性:由于汽车的位置是每隔一段时间记录一次,所以汽车经过其运动轨迹中的一个指定位置(非记录点)的准确时间不能确定。如图1(b)所示,p1和p3是一辆汽车的一条轨迹数据中的两个相邻轨迹点,已知这辆汽车在p1和p3之间是直行的,所以会经过点p2。但是不能确定这辆汽车经过p2的准确时间,因为这辆汽车在p1和p3之间不一定是匀速行驶的。
1相关研究
目前国内外研究者在估算产生不确定性轨迹数据的汽车经过每条可选路径的概率时,大多采用简单平均概率的方法——经过某条可选路径的概率等于1除以可选路径总数[3],而没有考虑各条可选路径的特殊性和实时路况条件,如各条路径的长度和道路拥堵情况等。但是,在两个相邻的轨迹点间,如何评估汽车可能经过的位置点,人们提出了一些有价值的模型和方法。
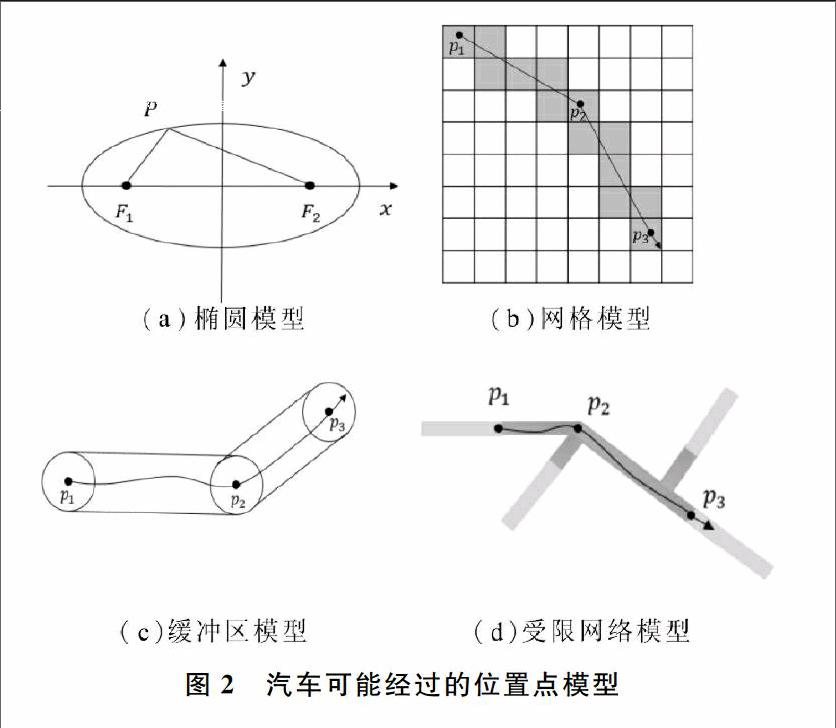
椭圆模型:Pfoser和Tryfona[46]提出了一个基于最大速度的椭圆模型。假设各条道路都有一个对应的最大速度,代表汽车在道路上行驶的最高限速,则在汽车运动轨迹的两个相邻轨迹点之间,汽车可能经过的位置限定在一个椭圆内。此椭圆的焦点为这两个轨迹点对应的位置,长轴等于两个轨迹点的时间差与最大速度的乘积。如图2(a)所示,焦点F1与F2是这两个相邻轨迹点对应的位置。
网格模型:文献[7]和文献[8]中提出了一个网格模型。如图2(b)所示,设定若干个大小相等的正方形网格,汽车在两个相邻的轨迹点之间可能经过的位置,限定在连接这两个轨迹点的线段穿过的网格内。但是确定这些网格的尺寸是一个复杂的问题,因为网格尺寸直接影响到评估汽车可能经过的位置点的准确度和计算量。
缓冲区模型: Trajcevski和Tamassia等在文献[9]中提出了一个缓冲区模型。如图2(c)所示,给汽车设定一个缓冲区阈值,汽车在两个相邻轨迹点之间可能经过的位置,限定在一个连接这两个轨迹点的缓冲区内。
受限网络模型:在文献[10]和文献[11]中,作者把汽车的运动轨迹数据映射到路网上,然后把汽车可能经过的位置限制在路网的道路上。如图2(d)所示,受限网络模型使汽车可能经过的位置点范围得到了很大程度的压缩。
2算法
2.1定义
定义1轨迹:一条汽车轨迹T是由一辆汽车一次行驶产生的位置点所组成的一个序列。每一个位置点(如点p)的数据包含了经纬度坐标和时间戳p.t等属性。即:T:p1→p2→...→pn,其中pi.t
参考文献:[1] PROSER D, JENSEN C. Capturing the uncertainty of movingobject representations [C]. Hong Kong:Springer, 1999:111131.
[2] ZHENG YU. Computing with spatial trajectories [M]. Compting with Spatial Trajectories. Springer Publishing Company: Incorporated, 2011.
[3] CHENG R, KALASHNIKOV D, PRABHAKAR S. Evaluating probabilistic queries over imprecise data [J]. Proceedings of Acm Sigmod,2003:551562.
[4] PROSER D, TRYFONA N. Capturing fuzziness and uncertainty of moving objects representation [M]. Berlin Heidelberg: Springer, 2001:112126.
[5] HORNSBY K, EGENHOFER M J. Modeling moving objects over multiple granularities [J]. Annals of Mathematics&Artificial Intelligence, 2002, 36(12):177194.
[6] KUIJPERS B, OTHMAN W. Trajectory databases:Data models, uncertainty and complete query languages [J]. Journal of Computer & System Sciences, 2010, 76(7):538560.[7] LIU HECHEN, SCHNEIDER M. Querying moving objects with uncertainty in spatiotemporal databases [C]. Database Systems for Advanced Applicationsinternational Conference, 2011:357371.
[8] PELEKIS N, KOPANAKIS I, KOTSIFAKOS E, et al. Clustering trajectories of moving objects in an uncertain world [C]. Ninth IEEE International Conference on Data Mining, 2009:417427.
[9] ZHANG MEIHUI, CHEN SU, JENSEN C, et al. Effectively indexing uncertain moving objects for predictive queries [J]. Proceedings of the VLDB Endowment, 2009,2(1):11981209.
[10] DING ZHIMING, GUTING RH. Uncertainty management for network constrained moving objects [M]. Berlin Heidelberg: Springer, 2004:411421.
[11] DING ZHIMING. UTRtree: an index structure for the full uncertain trajectories of networkconstrained moving objects [C]. Ninth International Conference on Mobile Data Management, 2008:3340.
[12] 衛泽,李厚朴.顾及高程时计算两点间大地距离的实用方法[J]. 舰船电子工程,2011,31(8):5255.[13] 韩京清. 自抗扰控制技术[J]. 前沿科学, 2007(1):2432.(责任编辑:黄 健)
- 江苏省城市化水平的综合测度及耦合协调性分析
- 中小城市人居环境质量评价
- 武汉东湖吹笛景区植物多样性研究
- 舟山建设智慧社区的对策思考
- 基于pyswmm的雨水管道积水自动化分析系统设计
- 基于改善农村生态环境的垃圾治理策略研究
- 我国农村民居抗震工程综述
- 冬奥会对农村生活环境的影响与政策建议
- 农业经济发展实施“互联网+”战略途径研究
- 微信公众平台在农经信息服务中的应用研究
- 深入探究乡村振兴战略
- 大遗址保护视阈下美丽乡村建设策略研究
- 社会工作赋权理论视角下的农村女性素质提升
- 村民参与乡村治理的困境与路径
- 陕南移民搬迁后新农村发展的问题及策略
- 中国乡村建设理念的进化性解析
- 基于PLC的智能乡镇建设
- 乡村振兴战略的实施路径探索
- 广东徐闻大汉三墩渔港经济区发展对策研究
- 经济新常态下宁波海洋产业升级研究
- 贵州省产业集群的集聚度测算
- 浅析安徽省农业信息化现状与对策
- “三权分置”背景下河南省土地流转问题研究
- 重庆市智慧农村发展研究
- 新疆玛纳斯河观光带生态农庄发展状况及存在问题研究
- cash desks
- cash discount
- cashdiscount
- cashdispenser
- cash disˌpenser
- cashdividend
- cash dividend
- cash down
- cashed
- cashed-in
- cash equivalent
- cashequivalent
- casher
- cashes'
- cashes
- cashew
- cashew nut
- cashew-nuts
- cashews
- cash flow
- cashflow
- cashflowforecast
- cash-flow forecast
- cash flows
- cashgeneration
- 舁
- 舁疾
- 舂
- 舂兰秋菊
- 舂容
- 舂容典雅
- 舂捣
- 舂揄蹂簸
- 舂撞
- 舂杵
- 舂槀
- 舂槁
- 舂牘
- 舂碓
- 舂米
- 舂米或捶衣的木棒
- 舂米是白的,舂炭是黑的
- 舂臼
- 舂融
- 舂谷的器具
- 舂陵王气
- 舃
- 舃奕
- 舃履
- 舄