王孟 孟巧玲
摘 ?要: 針对目前下肢康复训练设备适配性差和康复训练效果不佳的现状,并结合居家日常康复的使用要求,提出一种基于传统物理康复训练关节运动轨迹的轮椅式下肢康复训练机构。详细分析了物理疗法中下肢髋-膝关节康复训练运动规律和特点,并对一个周期内不同治疗阶段进行了系统化分析;利用该规律对可实现关节运动特征的机构构型进行尺寸综合与分析,并基于该构型研制一款轮椅式下肢康复训练系统。该款下肢康复训练系统可以实现髋关节训练运动角度为:91.37°~126.51°,膝关节训练运动角度为:89.11°~135.35°。基于该构型的实验样机可以实现物理疗法所规划的运动轨迹,实际可以实现髋关节运动角度为91°~128°,膝关节运动角度为:90°~131°。该下肢康复训练系统可以模拟康复治疗的师物理治疗时的操作手法,辅助患者进行下肢康复训练,为患者提供稳定可靠的物理治疗,具有积极的社会意义和临床价值。
关键词:?下肢康复训练;物理疗法;髋-膝联动;尺寸综合
中图分类号:?TP318????文献标识码:?A????DOI:10.3969/j.issn.1003-6970.2019.09.006
本文著录格式:王孟,孟巧玲. 基于物理疗法轮椅式下肢康复训练系统设计[J]. 软件,2019,40(9):27-32
Design of Wheelchair-type Lower Limb Rehabilitation Training System Based on Physical Therapy
WANG Meng, MENG Qiao-ling
(Institute of Rehabilitation Engineering & Technology, School of Medical Instrument and Food Engineering,?University of Shanghai for Science and Technology, Shanghai 200093,?China)
【Abstract】: Aiming at the current poor adaptability of the lower limb rehabilitation equipment and the poor effect of rehabilitation training, combined with the requirements for the daily rehabilitation of the home,?this paper proposes a wheelchair-type lower limb rehabilitation training mechanism based on the traditional physical rehabilitation training of joint motion trajectory.First of all, this article analyzes the law and characteristics of hip-knee joint motion in lower limb rehabilitation in physical therapy. This article analyzes the different stages of rehabilitation in a cycle, uses this rule to perform the dimensional synthesis and analysis of mechanism configurations that can achieve joint motion characteristics, and develops a wheelchair-type lower limb rehabilitation training system based on the configurations.The lower limb rehabilitation training system can achieve a hip joint training angle of 91.37°~126.51°, knee joint training movement angle of 89.11°~135.35°. The experimental prototype based on this configuration can realize the trajectory planned by physical therapy. Actually, the hip joint movement angle can be 91°~128°, and the knee joint movement angle is 90°~131°.The lower limb rehabilitation training system can simulate the operation method of the physical therapy of the rehabilitation therapy, assist the patient to perform the lower limb rehabilitation training, provide stable and reliable physical therapy for the patient, and has positive social significance and clinical value.
【Key words】: Rehabilitation training of lower extremities; Physical therapy; Hip-knee linkage; Size synthesis0??引言
脑卒中患者常伴有肢体功能障碍等影响生活质量的问题[1-3]。肢体功能康复训练是帮助其恢复患侧运动与神经功能主要途径之一[4]。但是由于神经损害引起的肢体功能障碍患者在经过急性期康复后,需在家完成恢复期和后遗症期康复治疗直到痊愈,肢体功能障碍恢复是一个长期问题。因此,居家肢体功能训练在患者整体康复治疗过程中有至关重要的作用。
下肢是人体重要的支撑器官,其功能康复训练主要有关节活动度训练、肌力恢复训练等以达到神经重塑的目的。随着机器人技术的发展,下肢康复训练机器人成为辅助下肢功能康复训练的重要手段之一。目前,下肢康复训练机器人种类繁多,根据减重方式可分为座椅式和悬吊式。座椅式下肢康复训练机器人采用座椅与末端牵引机构共同作用带动髋-膝关节进行训练。比如,Beomsoo等人[5-6]根据康复患者轮椅出行的特点将轮椅作为减重与支撑系统,采用外骨骼结构设计一种基于轮椅的可进行髋-膝关节联动下肢康复训练系统,为保证减重效果与安全性,该系统结构复杂且机架较大,不适合在狭隘空间内移动与训练。上海交通大学殷月红团队结合人体仿生学原理设计了一款可以进行髋-膝-踝关节训练的床式下肢外骨骼康复机器人,但以床体作为平台不方便患者日常移动,患者训练时还需转移到床体上。上海大学沈林勇[7]和中国矿业大学王洪欣等人[8]设计了一种基于仿生学的多功能电动助步轮椅,可以帮助轮椅使用者移动和行走,但该类产品康复训练效率低、适配性差,且偏瘫患者使用时容易发生危险。浙江大学严华,杨灿军结合临床经验设计了一款髋-膝关节联动的轮椅式下肢运动康复训练外骨骼系统[9],但该产品进行康复训练效率低下、穿戴繁重、操作复杂。东南大学田梦倩团队结合临床偏瘫步态和正常步态特征研发了一种帮助髋-膝关节训练的轮椅助行康复训练一体机[10],但偏瘫患者的情况千差万别,因此该产品实用性较差。瑞士洛桑联邦理工学院研制了一种基于车体和外骨骼机械腿的髋-膝-踝关节联动下肢康复机器人?[11-12],该机器人体积过于庞大和移动困难。北京理工大学黄高团队针对康复轮椅与外骨骼机器人各自的特点设计了一种髋-膝-踝关节联动的脚踏式外骨骼康复轮椅[13-14],但偏瘫患者两侧运动差别较大,不能保证患侧下肢按照脚踏规律运动。合肥工业大学王勇团队通过探索正常步态及患者康复过程中步态运动的特点,研制了一种可以进行不同程度髋-膝关节康复训练的新型机器人[15],但该机器人不能移动,偏瘫患者需要先转移至该机器人上才可进行康复训练,其次正常步态不适合偏瘫患者康复训练。瑞士SWORTEC 公司[16] 研制了一种坐卧姿状态下6自由度下肢康复训练机器人,该机器人适用于中后期偏瘫患者,不适用于早期患者。美国的NUSTEP智能康复训练器[17]通过模拟蹬车运动和下肢屈伸运动来完成髋-膝-踝关节康复训练,较难用于偏瘫患者的康复治疗。悬吊式下肢康复训练机器人主要通过悬吊机构与下肢外骨骼机构相结合模仿人行走的步态来完成髋-膝关节活动度训练。比如瑞士Hocoma AG研发Lokomat[18]由“外骨骼式下肢步态矫正驱动装置”、“智能减重装置”和“医用跑台”组成。悬吊式康复机器人通常由三部分组成,体积十分庞大,只能固定在某一地点,使用时患者需转移到设备上才能进行康复训练,此外,悬吊式下肢康复训练系统需要由专业的治疗师进行操作,非专业用户不具备操作该类机器人的能力,因此其主要在医院等专业性机构使用。虽然在中后期的康复治疗中有较好的效果,能有效实现正常步态规律。但患者躯干被束缚悬挂,上体活动受限,舒适度下降,价格十分昂贵以及体积等原因不适合居家康复训练。
综上所述,为实现髋、膝关节活动度训练,现存下肢康复训练机器人主要是模拟人体正常步态和骨骼系统,结合外骨骼技术来进行设计,但偏瘫患者步态差异较大,且患者下肢姿态与步态与正常人不同,并且其在训练时无法准确实现正常运动规律,依据这些前提条件仍无法满足康复训练中所需关节活动度问题,且只能在治療师监督指导的情况下进行,该类机器人并不适用于居家患者进行日常康复训练。座椅式下肢康复机器人整体小巧,使用灵活方便,可以与患者日常使用轮椅、护理床等日常设备有效结合,在满足患者日常功能基础上,还可以实现患者居家随时康复需求,操作使用十分方便。此外,大多数脑卒中患者以轮椅为主要移动工具,而其从轮椅到下肢康复训练机器人的转移也是下肢康复训练的难题之一。因此,本文提出一种基于物理治疗手法的髋-膝关节运动规律的下肢训练机构设计方法,并将下肢康复训练机构与轮椅平台结合设计,形成一种轮椅式下肢康复训练系统,该系统也为脑卒中等长期使用轮椅的患者的居家康复找到一条适合的康复与辅助方案途径,考虑到大多数患者都需要使用轮椅,并可解决患者从轮椅转移到康复训练设备上时的转移困难问题。1??基于物理治疗手法的髋-膝关节运动规律分析
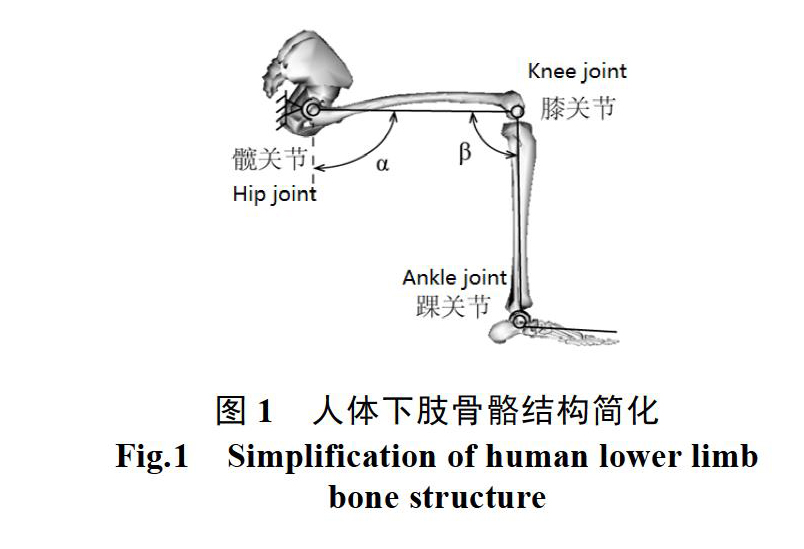
物理康复训练是其目的是确保肌肉和构成关节的软组织的柔韧性,维持关节正常的活动范围,防止因关节长期制动而出现挛缩。对于运动功能障碍的患者通过被动关节运动诱发正常的运动感觉、强化肌力、提高协调性、改善肢体的运动功能。人体下肢通过髋关节、膝关节和踝关节紧密连接构成下肢骨架,髋关节和踝关节作为球面关节,膝关节作为普通铰链关节,因此可以得到坐姿状态下人体下肢骨骼简化结构,髋关节运动角度为![]() ,膝关节运动角度为
,膝关节运动角度为![]() ,如图1所示。
,如图1所示。
在下肢物理康复治疗中,坐姿是康复治疗师使用最多的体位[19],患者处于坐姿状态时,下肢的髋-膝关节可以完成一定程度的屈伸运动。治疗师辅助患者进行康复训练过程始终遵循的“缓慢、匀速、平稳、由小到大”的原则。康复训练时患者处于坐姿状态,并且保持上半身稳定,治疗师双手分别托起患者下肢的脚踝处和膝关节后窝处。坐姿状态下,1个髋-膝关节物理康复运动周期分为3个阶段:伸展阶段、保持阶段和回收阶段,具体过程如图2所示。伸展阶段髋关节屈曲和膝关节伸展,达到患者极限最大角度时进入保持阶段;保持阶段需保持极限位置时下肢姿态一定时间(5?s~15?s);最后,髋关节伸展和膝关节屈曲回到初始状态。伸展阶段和
回收阶段动作总体呈现匀速变化、对称一致的特点,保持阶段会在一段时间内保持当前姿态。根据实际康复训练操作手法,坐姿状态髋关节和膝关节的初始角度90°~100°,不同阶段的患者可以运动的最大极限角度不相同,康复治疗中初始训练的最大角度要求范围在20°~30°,随着训练程度提升不断增加关节运动角度。2??基于坐姿状态下人体髋-膝关节运动规律的下肢训练机构构型
2.1构型分析
下肢康复训练设备研究是以人体下肢外骨骼为基础,根据人体下肢特点,通过对治疗师进行坐姿状态下髋膝关节活动度维持训练的手法分析可知,治疗师在进行康复治疗时,患者的髋膝关节具有联动运动特征。为了达到下肢关节活动度维持训练的效果,限制髋关节其余自由度,只保留屈曲伸展,简化为铰链关节。采用2自由度的下肢关节活动度训练机构(如图3所示),其中A,B为铰链链接,C为特殊铰链机构,可以调节角度大小。AB段为大腿段,BC段为小腿段,末端段为脚掌段。
由于髋-膝关节为联动,在康复训练中治疗师通过双手带动患者下肢完成康复训练,为了更好的模拟治疗师的操作手法分别用两个电动推杆提供动力。本课题研究的下肢关节活动度训练机构构型为分离式全驱动系统,分别由2个推杆电机提供动力,分别控制髋、膝关节的运动(如图4所示)。全驱动系统可以完全控制髋-膝关节的训练角度,最大程度上接近治疗师康复治疗时的操作。分离式全驱动系统由于髋-膝关节的运动相互间没有影响,因此控制更加简单,更容易实现治疗师的操作手法。
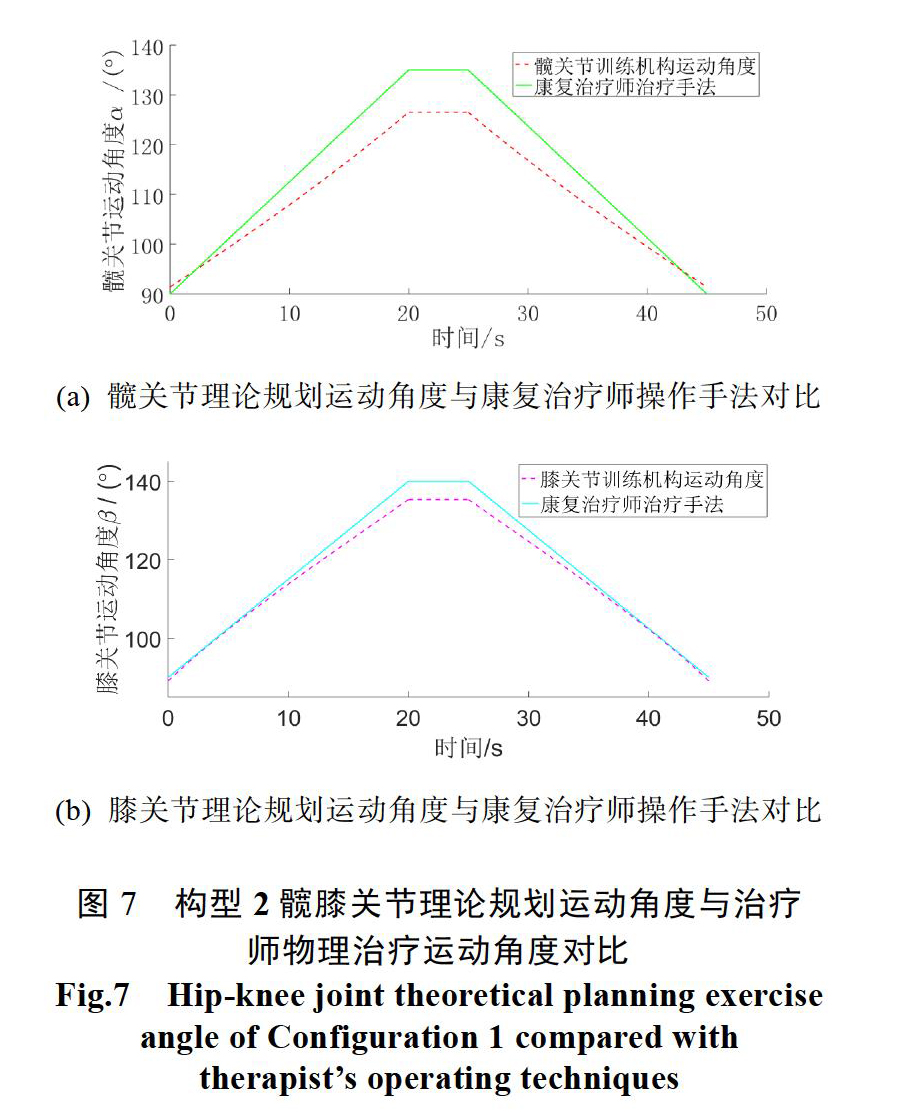
对下肢关节活动度训练机构建立数学模型,分析机构在进行髋-膝关节训练时的运动规律,与治疗
师进行髋-膝关节康复训练时物理治疗手法进行对比,进一步优化机构的设计,最终达到与治疗师采用物理治疗法相似的效果。
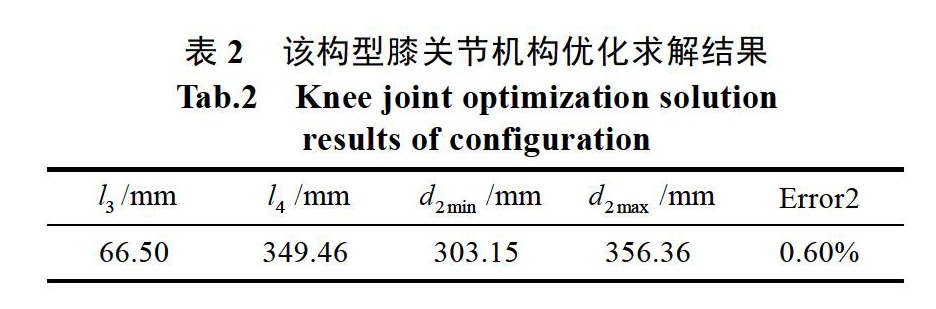
2.2构型尺寸综合
构型中电动推杆1模拟抬起膝关节后窝的操作手法,电动推杆2模拟抬起脚踝的操作手法。分析该机构的综合尺寸时,由杆AH,杆HF,杆AK,杆MD,距离AD,距离DK,推杆电机DF的尺寸求解得到髋关节运动角度的大小,然后由杆BG,距离BE,推杆电机EG,求解膝关节运动角度![]() 的大小。假设杆AH,杆MD,杆BG,杆BE,杆HF,杆AK,距离AF,杆MK,距离DK,距离AD的长度分别为
的大小。假设杆AH,杆MD,杆BG,杆BE,杆HF,杆AK,距离AF,杆MK,距离DK,距离AD的长度分别为![]() 、
、![]() 、
、![]() 、
、![]() 、
、![]() 、
、![]() 、
、![]() 、
、![]() 、
、![]() ,推桿电机1长度为
,推桿电机1长度为![]() ,推杆电机2长度为
,推杆电机2长度为![]() 。以O为原点建立如图5所示的X-O-Y坐标系,杆AH对应大腿段,杆BG对应小腿段,髋关节角度(大腿与竖直位置)为α+θ1,膝关节(小腿与水平位置)角度为
。以O为原点建立如图5所示的X-O-Y坐标系,杆AH对应大腿段,杆BG对应小腿段,髋关节角度(大腿与竖直位置)为α+θ1,膝关节(小腿与水平位置)角度为![]() +θ2,
+θ2,![]() ,
,![]() (
(![]() ,
,![]() 分别为推杆电机1、2的速度,t为时间)。
分别为推杆电机1、2的速度,t为时间)。
3??原型机试制:轮椅式下肢康复训练系统机械系统设计
在进行机械结构设计时,要充分保证机械结构的可靠性及人因工程学理念,以保证轮椅的舒适性。为了验证上述方案的理论分析的正确性,对上述构型的进行机械设计并制造出实验样机。轮椅式下肢
康复训练系统效果图如图8所示,轮椅式下肢康复训练系统的主要参数如表3所示。
轮椅式下肢康复训练系统样机具有2个自由度,可用于患者的下肢髋、膝关节活动度维持训练,主要组成部分包括:轮椅车架模块、靠背模块、坐垫模块、扶手模块、下肢康复训练模块、控制驱动模块等6部分。其中靠背模块可以实现起背运动,因此轮椅可以由坐姿状态切换到平躺状态,但在下肢康复训练中需要保持坐姿状态,此时靠背不可以移动。其中下肢康复训练模块用于向患者提供下肢康复训练,主要包括髋-膝关节活动度维持训练机构,由于轮椅式下肢康复训练系统的下肢康复训练模块左右对称,因此只对单侧结构进行分析。
抬小腿机构通过抬小腿电机带动小腿运动,进而完成膝关节活动度维持训练。抬大腿机构工作时,抬大腿电机来回前后运动时,皮坐垫可以上下运动,以抬起/放下大腿进而完成髋关节活动度维持训练。该下肢康复训练系统具有反馈调节系统,若患者运动到极限角度时会触发反馈调节系统,此时关节运动角度不会增大,随后会进入保持阶段和回收阶段。患者进行下肢康复训练时,通过两种机构的协同配合完成完整髋-膝关节活动度维持康复训练。为了适应不同身高患者的腿长,在小腿处设计了伸腿电机,如图9所示,通过调节伸腿电机的长度进而满足不同患者的实际需求。4??结论
(1)通过对康复治疗师对患者进行康复训练时的操作手法的分析得出下肢康复训练的规律,基于下肢康复训练物理疗法的运动规律,为下肢康复训练机器人设计提供理论基础和设计依据。
(2)结合人体下肢特点,提出两种构型方案,并对其进行尺寸综合和分析,利用MATLAB求解得到机构尺寸最优解。通过对该机构机械结构,运动规律和控制规律的分析,从理论上证明该下肢康复机器人能完好的复现康复治疗师进行下肢康复治疗时的治疗手法。并为其中一种构型制作了样机,以便验证其实际效果。
(3)目前多数康复机器人的训练效率较低、适配性差、操作复杂,通过模拟物理疗法进行机构设计可为患者提供高效、可靠、舒适的康复体验,可为康复机器人设计提供一种新的思路。
参考文献
- 邹霞. 早期个性化心理护理在脑卒中患者治疗中的应用[J]. 航空航天医学杂志, 2018, 29(3): 379-381. 梁天佳. 脑卒中偏瘫上肢功能障碍康复治疗研究进展[J]. 广西医科大学学报, 2018, v.35(07):?132-134. 李小粉, 余丽娜, 钱新毅,等.脑卒中后肢体功能障碍康复的研究进展[J]. 山西医药杂志, 2017(22):?69-72. 张冰婵, 郑立. 强制性运动疗法和常规康复疗法治疗脑卒中上肢功能障碍患者效果比较[J]. 内科, 2018, v.13(04):?123-124+126. Hwang B, Jeon D. Development and preliminary testing of a novel wheelchair integrated exercise/ rehabilitation system[C].// IEEE International Conference on Rehabilitation Robotics. London: IOS Press, 2013:?1-6. Hwang B, Jeon D. A wheelchair integrated lower limb exercise/ rehabilitation system: Design and experimental results on the knee joint[C].// IEEE/SICE International Symposium on System Integration. 2012:164-169. 沈林勇, 王代芹, 章亚男,?等. 可直立行走的电动助步轮椅的步态分析[J]. 机械设计, 2007, 24(8):?15-20. 王洪欣, 杜树军, 杨旭. 可直立行走的助步轮椅机构设计[J]. 机械传动, 2010, 34(5):?45-48. 严华, 杨灿军. 轮椅式下肢运动康复训练外骨骼系统研究[C]// 全国康复医学工程与康复工程学术研讨会. 2010. 赵威. 轮椅助行康复训练一体机研制[D]. 东南大学, 2016. Allemand Y, Stauffer Y, Clavel R, et al. Design of a new lower extremity orthosis for overground gait training with the WalkTrainer[C]// IEEE International Conference on Rehab ilitation Robotics. IEEE, 2009:?550-555. Bouri M, Stauffer Y, Allemand Y, et al. The WalkTrainer: A Robotic System for Walking Rehabilitation[C]// IEEE Inter nat ional Conference on Robotics and Biomimetics. IEEE, 2007:?1616-1621. 黄高, 张伟民, Marco Ceccarelli,等. 一种新的康复与代步外骨骼机器人研究[J]. 自动化学报, 2016, 42(12):?1933-1942. 黄强, 黄高, 马克·塞思开尔利,等. 一种脚踏式下肢外骨骼运动康复轮椅:, CN 104997597 A[P]. 2015. 姜礼杰, 王良诣, 王勇,等. 一种混合输入并联拟人步态康复机器人的机构设计与分析[J]. 机器人, 2016, 38(4):?495-503. Metrailler P, Blanchard V, Perrin I, et al. Improvement of rehabilitation possibilities with the MotionMaker TM[C]// Ieee/ras-Embs International Conference on Biomedical Rob otics and Biomechatronics. IEEE, 2006:?359-364. 史小华. 坐/卧式下肢康复机器人研究[D]. 燕山大学, 2014. Hidler J, Wisman W, Neckel N. Kinematic trajectories while walking within the Lokomat robotic gait-orthosis.[J]. Clinical Biomechanics, 2008, 23(10):?1251-1259. 于兑生. 运动疗法与作业疗法[M]. 华夏出版社, 2002. 王明. 基于實时流技术的诈骗短信预警系统的设计与实现[J]. 软件, 2015, 36(1): 32-37. 马浩然. 基于NS3 的分布式消息系统Kafka 的仿真实现[J]. 软件, 2015, 36(1): 94-99. 王旭峰, 王智立. 基于SOA 的业务动态定制的网络管理系统设计与实现[J]. 软件, 2015, 36(1): 100-103. 曹延超. 基于STM32 的四旋翼飞行器姿态测量系统设计[J]. 软件, 2015, 36(1): 104-109. 杨琪,黄建明. 家居漫游系统的设计与实现[J]. 软件, 2015, 36(1): 26-31.
- 建筑施工企业财务管理存在的问题及完善对策
- 浅析新经济背景下房地产企业财务管理的创新管理路径
- 投资项目经济分析方法研究
- 浅谈证券公司流动性风险特征、成因及流动性储备
- 新农村建设下的农村经济财务管理分析
- 农村经济管理工作的主要任务及对策刍议
- 农业经济管理对农村经济发展的作用
- 试论大数据时代宏观经济分析面临的机遇与挑战
- 探析国际资本运动新趋向与中国资本市场生长
- 推进农业经济管理信息化建设的有力措施分析
- 创新混改嫁接技术,激发市场活力,加快培育资本市场新动能源头活水
- 高校执行公务卡制度的困境及对策
- 美国近期环境动态与政策走向
- 高新技术企业的税收优惠与风险防范探析
- 企业并购重组税收筹划策略问题探讨
- 加强税务局税务管理创新
- 电子发票在报纸征订中的应用
- 信息化背景下高校基建档案的有效管理及探索
- 高校预算管理研究
- 行政事业单位加强预算管理探究
- 集团公司中企业全面预算的推行
- 浅谈现代企业管理对企业的意义
- 上市公司并购重组的风险及防范措施
- 关于加强国有企业全面预算管理的思考
- 关于科研单位科研信用管理的探讨
- winner
- winners
- winnie-the-pooh
- winning
- winningly
- winningness
- winningnesses
- winnings
- wino
- winos
- win out
- wins
- win sb around/over/round (to sth)
- win sb over
- win sb over/round (to sth)
- win sb/sth back
- win sb ↔ over
- winter
- wintered
- winterier
- winteriest
- wintering
- winterish
- winterishly
- winters
- 月亮坝里晒被单
- 月亮坝里晒谷子
- 月亮坝里点灯
- 月亮坝里耍弯刀
- 月亮坝里耍弯刀——明砍
- 月亮坝里耍弯刀——明砍(侃)
- 月亮底下打灯笼——空挂明
- 月亮底下打灯笼——空挂明(名)
- 月亮底下点灯笼——多此一举
- 月亮底下看影子——自看自大
- 月亮当镜子——太把自己看大了
- 月亮的光泽
- 月亮的光辉
- 月亮落了下去
- 月亮虽亮,晒不干谷子
- 月亮虽好,还得众星捧
- 月亮跟着太阳走——借光
- 月亮跟着太阳转
- 月亮跟着太阳转——沾光
- 月亮路
- 月亮运行
- 月亮里点灯——空挂明(名)
- 月亮里的桂树
- 月亮里的桂花树——高不可攀
- 月亮门