

摘 要:针对线控制动系统单轮制动失效时车辆制动稳定性控制问题,提出了协同线控转向和线控制动系统的制动力优化分配控制策略.为了最大程度满足驾驶员的制动期望,采用二次规划方法初始分配剩余三轮制动力;为防止车辆因制动力重构产生横摆或跑偏,采用滑模控制方法设计前轮转向控制器;考虑前轮转向对轮胎纵向力的影响,建立基于魔术公式的轮胎侧向力数学模型,基于二次规划方法实时优化轮胎在侧偏纵滑工况下的制动力.联合Simulink和Carsim进行了仿真实验分析,结果显示车辆的横摆角速度快速收敛为0,侧向跑偏距离均小于0.1 m.结果验证了本文提出的制动力优化分配控制策略在不同的制动工况下均能提高单轮制动失效车辆的制动稳定性.
关键词:线控制动;单轮制动失效;线控转向;制动力协同优化分配;滑模控制
中图分类号:U461.5 文献标志码:A
Abstract:In order to solve the problem of vehicle stability control after single wheel brake failure in the brakebywire system, the control strategy of optimal braking force distribution was proposed by cooperating the steerbywire and brakebywire systems. To meet the driver's desired deceleration as closely as possible, the braking force of the remaining three wheels was redistributed initially by the sequential quadratic programming method. The front steering controller was designed by sliding mode control method in order to prevent the vehicle from deflection and spin caused by the braking force reconstruction. Considering the influence of the front steer on the longitudinal force of the tire, the mathematical model of tire lateral force based on the magic formula was established. The braking force was optimized in the real time under the side slippery condition by the sequential quadratic programming method. A cosimulation experiment established by Simulink and Carsim was carried out to analyze the strategy, and the result showed that the yaw rate of the vehicle quickly converged to 0 and the lateral deviation displacement was less than 0.1 m. The result verifies that the proposed method of optimal braking force distribution can improve the braking stability of single wheel brake failure vehicle under different braking conditions.
Key words:brakebywire; single tire brake failure; steerbywire; cooperative optimal braking force distribution;sliding mode control
随着科技的发展,线控制动系统因其高效、节能和冗余等特点,受到汽车工业界的日益关注.电子机械制动系统(ElectroMechanical Braking System,EMB)作为线控制动系统的一种,用电完全取代传统制动系统的液压油或空气等传力介质,在轮边增加电子机械机构进行制动,具有可控性好、响应速度快等特点,符合节能、环保等未来汽车的发展方向[1].
车辆进行制动时,当某种故障发生在传统制动系统时,失效的制动器将不能提供给驾驶员所期望的制动力矩,导致正在减速的汽车因左右侧制动力不平衡产生横摆运动,严重时会发生跑偏和甩尾等危险情况[2].此外,因车辆制动时前、后车轴的载荷发生转移,车辆前轮出现制动失效时更为危险[3].电子機械制动系统由于其本身的固有冗余,在单个车轮发生制动失效时,可利用其余三轮进行制动力重构,结合前轮线控转向系统[4],实现制动力重构后的车辆稳定性控制.
针对单轮制动失效时车辆稳定性控制问题,国内外学者的研究大致分为两类:第一类是在低制动强度下通过重构剩余三轮制动力实现车辆稳定性控制;第二类是结合制动和转向系统,实现高制动强度下的车辆稳定性控制.Kim等[5]针对装备有轮毂电机的线控制动汽车设计容错控制结构,结合再生制动系统,利用滑模控制算法计算补偿横摆力矩,取得了较好的控制效果,但未考虑高制动强度下的制动力重构问题;JI等[6]提出横摆力矩目标控制算法,利用滑模控制算法获得修正横摆力矩,运用KKT条件将目标修正横摆力矩优化分配到剩余三个制动车轮,但仍未考虑高制动强度下的制动力重构.Hac[7]通过设置阈值逐步建立两侧车轮制动力的平衡,提供驾驶员充足的时间做出反应并实施转向,既能使驾驶员保持对汽车的掌控,又不会明显增长制动距离,但未考虑轮胎非线性特性对整车稳定性的影响;王梦春[8]采用基于控制分配算法的主动转向与制动系统协调控制,实现了单轮制动失效工况下整车的稳定性控制,但忽略了在轮胎达到附着极限时转向对纵向力的影响,也未能将车辆的跑偏距离控制在较为理想的范围.
鑒于此,本文提出结合线控转向和线控制动系统的三轮制动力协同优化分配控制策略.控制策略实施流程如图1所示:首先利用线控制动系统固有冗余,初始分配剩余三轮制动力,使车辆最大限度地满足驾驶员期望的制动减速度;再以横摆角速度和质心侧偏角为控制目标,基于滑模控制理论,设计前轮转向控制器,抑制车辆由于制动不平衡产生的横摆和跑偏;最后,考虑前轮转向对轮胎纵向力的影响,以轮胎负载率为优化目标,实时优化分配剩余三轮制动力.
1 车辆动力学模型
1.1 整车动力学模型
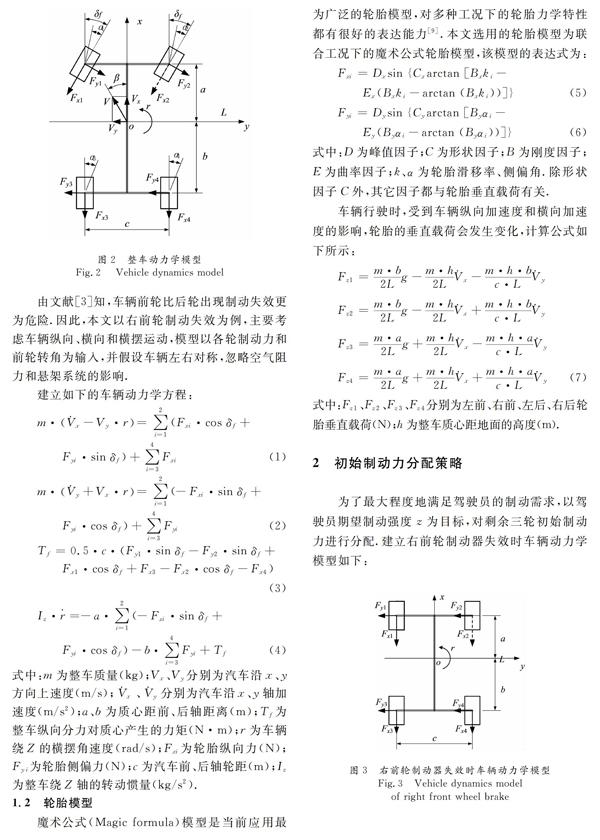
为了分析车辆单轮制动失效后的受力情况,建立整车动力学模型如图2所示.本文建立的整车动力学模型加入前轮转角输入,为后文设计前轮转向控制器提供控制模型.图中,β为车辆质心侧偏角(rad),αi为轮胎侧偏角(rad),L为整车前后轴距离(m).为了表述方便,无特殊说明,本文下标i=1、2、3、4分别表示左前轮、右前轮、左后轮、右后轮.
由文献[3]知,车辆前轮比后轮出现制动失效更为危险.因此,本文以右前轮制动失效为例,主要考虑车辆纵向、横向和横摆运动,模型以各轮制动力和前轮转角为输入,并假设车辆左右对称,忽略空气阻力和悬架系统的影响.
上述约束条件与式(27)表达含义一致,不再赘述.优化求解该目标函数最小值,将修正的左前轮、左后轮制动力重新分配.
由于目标函数、约束条件为简单的二次规划问题,为了保证算法的实时性,可以将优化求解过程直接运用解析几何方法求解不同约束条件下的最优解,使算法更加高效[13].
5 制动力协同优化分配策略仿真
5.1 仿真模型的建立
为了验证本文提出的制动力协同优化分配控制策略的有效性,在高附着系数路面和低附着系数路面上,分别以不同的制动强度、制动初速度联合Carsim和Simulink进行仿真分析.
通过Carsim设置不同的路面附着系数、制动初速度,Simulink建立制动力的优化分配算法和前轮转向滑模控制器,分析所提出的协同分配控制策略在不同工况下的控制效果,评价指标包括车辆横摆角速度、制动减速度、跑偏距离、制动距离、剩余三轮制动力和前轮转角.
为了保证仿真的真实性,假设车辆:仅右前轮出现故障且故障可以迅速被诊断检测到;仿真过程中的路面附着系数恒定且可以通过路面辨识方法获得;线控前轮转向无需驾驶员的介入,完全由转向电机执行.
5.2 仿真结果
5.2.1 高附着系数路面仿真
汽车以不同的初速度在附着系数u=0.9的路面上行驶,制动强度分别为z=0.5、0.7、0.9,仿真终止速度为0.选取初速度分别为Vx=60 km/h、90 km/h.t=0时开始制动,t=0.3时制动强度直线上升到驾驶员期望的制动减速度并保持不变,仿真结果如图4至图6所示.
如图4~6所示,在高附着系数路面下,制动强度越大,制动失效后产生的横摆和跑偏越大;制动初始速度越大,制动失效后产生的横摆和跑偏也越大.有控制的车辆横摆角速度在3 s内逐渐收敛为零,车辆恢复稳定行驶,制动减速度最大程度跟随驾驶员的制动需求;三轮分配的制动力优化修正后趋于稳定,总体变化趋势与前轮转角保持一致;前轮转角的变化趋势与横摆角速度保持一致,随着后者的收敛逐渐趋于稳定.
5.2.2 低附着系数路面仿真
汽车以不同的初速度在附着系数u=0.4的路面上行驶,制动强度分别为z=0.5、0.7、0.9,仿真终止速度为0.选取初速度分别为Vx=60 km/h、90 km/h.t=0时开始制动,t=0.3时制动强度直线上升到驾驶员期望的制动减速度并保持不变,仿真结果如图7至图9所示.
从图7~9仿真结果可以看出,制动初期,由于制动力重构导致的左右侧制动力不平衡造成车辆失稳,制动强度、初始车速越大,产生的横摆和跑偏越严重;前轮转向介入后,利用较小转角可逐渐消除车辆横摆;剩余三轮分配的制动力,随着前轮转角的变化而变化,在经过不断的优化修正后逐渐趋于平稳;车辆的跑偏和制动距离都得到较好的改善.
6 结 论
本文协同前轮线控转向和线控制动系统,设计了单轮制动失效下制动力优化分配控制策略.首先基于二次规划方法初始分配剩余三轮制动力;然后设计了基于滑模控制方法的前轮转向控制器;接着建立基于魔术公式的轮胎侧向力数学模型,采用二次规划方法实时优化轮胎在侧偏纵滑工况下的制动力;最后联合Simulink和Carsim进行了仿真实验分析,结果显示车辆的横摆角速度快速收敛为0,侧向跑偏距离均小于0.1 m,制动强度最大程度地跟随驾驶员的制动期望,极大地提高了单轮制动失效车辆的制动稳定性.
参考文献
[1] 彭晓燕,陈昌荣,章兢. 电子机械制动系统的滑模控制研究[J]. 湖南大学学报(自然科学版),2010,37(8):35-39.
PENG X Y, CHEN C R, ZHANG J. Study of the sliding mode control of electromechanical brake systems[J]. Journal of Hunan University(Natural Sciences),2010,37(8):35-39.(In Chinese)
[2] 左斌. 汽车电子机械制动(EMB)控制系统关键技术研究[D]. 杭州:浙江大学机械工程学院, 2014:55-56.
ZUO B. Research on the key technologies of controller of automotive electro mechanical brake system[D]. Hangzhou: School of Mechanical Engineering, Zhejiang University, 2014:55-56. (In Chinese)
[3] 羅家庆. 四轮独立线控汽车底盘过驱动容错控制分配策略研究[D]. 长春:吉林大学汽车工程学院,2015:39-48.
LUO J Q. Study on distribution strategy of redundant actuate faulttolerant control for four wheels independent controlbywire electric vehicle chassis[D]. Changchun: College of Automotive Engineering, Jilin University, 2015:39-48. (In Chinese)
[4] SONG J. Integrated control of brake pressure and rearwheel steering to improve lateral stability with fuzzy logic[J]. International Journal of Automotive Technology, 2012, 13(4):563-570.
[5] KIM S, HUH K. Faulttolerant braking control with integerated EMBs and regenerative inwheel motors[J]. International Journal of Automotive Technology, 2016, 17(5):923-936.
[6] JI I P, JEON K, CHOI S. Design of failsafe controller for brakebywire system using optimal braking force distribution[C]// Electric Vehicle Symposium and Exhibition. IEEE, 2013:1-7.
[7] HAC A. Control of brakeand steerbywire systems during brake actuator failure[J]. SAE Technical Paper, 2006010923.
[8] 王梦春. 轻型线控制动汽车执行系统传感器故障诊断与整车稳定性协调控制[D]. 长春:吉林大学汽车工程学院,2013:32-59.
WANG M C. Fault diagnosis of the brakebywire actuators sensors and coordination control of vehicle stability[D]. Changchun: College of Automotive Engineering, Jilin University, 2013:32-59. (In Chinese)
[9] 李松焱,闵永军,王良模等. 轮胎动力学模型的建立与仿真分析[J]. 南京工程学院学报(自然科学版),2009,7(3):34-38.
LI S Y, MIN Y J, WANG L M, et al. Establishment and simulation analysis of tire dynamic model[J]. Journal of Nanjing Institute of Technology(Natural Sciences),2009,7(3):34-38. (In Chinese)
[10]周兵,田晨,宋义彤,等. 基于路面附着系数估计的AFS控制策略研究[J]. 湖南大学学报(自然科学版),2017,44(4):16-22.
ZHOU B, TIAN C, SONG Y T, et al. Control strategy of AFS based on estimation of tireroad friction coefficient[J]. Journal of Hunan University(Natural Sciences),2017,44(4):16-22.(In Chinese)
[11]罗文发,吴光强,郑松林. 基于HSRI模型的参数自适应质心侧偏角观测器的设计[J]. 汽车工程,2013,35(3):249-255.
LUO W F, WU G Q, ZHENG S L. Design of vehicle sideslip angle observer with parameter adaptation based on HSRI tire model[J]. Automotive Engineering, 2013,35(3):249-255. (In Chinese)
[12]徐薇. 基于滑模方法的汽车稳定系统容错控制研究[D]. 长春:吉林大学通信工程学院, 2015:35-37.
XU W. The fault tolerant control of vehicle stability system based on sliding mode method[D]. Changchun: College of Communication Engineering, Jilin University, 2015:35-37. (In Chinese)
[13]倪勤. 最优化方法与程序设计[M]. 北京:科学出版社, 2009:105-160.
NI Q. Optimization method and program design[M]. Beijing: Science Press, 2009:105-160. (In Chinese)
- 民族学为矢,艺术为的
- 江西漆画创作群落与发展特色研究
- 是非百年:王道士与藏经洞
- 设计元素在现代中国画中的运用
- 书法艺术对中文字体设计的启示
- 中国传统民间美术图形研究
- 论雕塑及其特征
- 凡心所向,素履所往
- 陈国乐作品
- 李文杰作品
- 仇强、李雪蓓作品
- 丁铄涵、吴波、严正达、赵广达作品
- 李立晨、武秉政作品
- 骆良宁作品
- 运卓旸作品
- 彭云飞作品
- 付轩宇、黄夏丽、郑韵、吕宛瑾作品
- 刘传亮、孙榕辰、王飞翔、丁一作品
- 胡锦康、黄逸飞、陆添、马伟作品
- 王庆英、张鹏、张雪成、张悦作品
- 张是泽、刘大琳作品
- 陈雅思、杨维芳、张宁、赵青韵作品
- 王超贤、李秋熠、王鹏粉、杨英作品
- 铜仁学院艺术学院学生作品
- 荆佳佳作品
- have a lot in common/have so much in common
- have a lot on
- have a lot on your mind
- have a lot on your plate
- have a lot to do
- have a low opinion of
- have a lump in your throat
- have a memory like a sieve
- have a mind of your own
- have a miscarriage
- have an accident
- have an advantage
- have an advantage over
- have an affair
- have a nap
- have an aptitude for
- have an effect
- have a negative impact on
- have a (nervous) breakdown
- have a nervous breakdown
- have a nice day/good weekend/great time etc
- have an idea
- have an impact
- have an influence
- have an obligation to do sth/be under an obligation to do sth
- 造端托始
- 造筑
- 造粉子
- 造纸
- 造纸工业
- 造罪
- 造耗造业
- 造肥改土
- 造膝
- 造膳
- 造舆论
- 造舌
- 造船
- 造船之都
- 造船学
- 造茧自缚
- 造血
- 造血工程
- 造血干细胞
- 造衅
- 造衅开端
- 造行
- 造见
- 造言
- 造言之刑