
摘 要:目前汽车上普遍采用的单电机雨刷系统是通过机械连接实现的雨刷臂同步摆动,这种结构具有占用空间大和故障时维修不便等缺点,采用的双电机雨刷系统克服了这些不足,同时还减小了系统的重量和机械噪音,但必须采用合理的方式解决双电机的运行同步问题。针对这一问题,设计了采用CAN(controller area network)总线的双电机同步控制雨刷系统控制器。搭建了控制器各部分的硬件电路,依据雨刷臂摆动过程中约束条件,建立了参考运行轨迹,并通过曲线拟合的方式将实验采集到的雨刷臂的位置信息绘制成实际运行轨迹。通过主从同步控制方式,采用CAN总线作为两侧控制器信息传递的通讯总线,解决了双电机的同步控制问题,并在实际车辆上进行了相关实验,且已投入使用。实验结果表明:采用CAN总线的双电机雨刷系统控制器能够实现雨刷臂同步稳定运行,并且能够对其参考运行轨迹进行密切跟踪。
关键词:
双电机雨刷系统;同步控制;轨迹建立;CAN总线
DOI:10.15938/j.jhust.2018.03.020
中图分类号: TM33
文献标志码: A
文章编号: 1007-2683(2018)03-0117-05
Dual-motor Synchronous Wiper System Controller Based on CAN Bus
YAN Da, WANG Xu-dong, SUN Yan-cheng
(School of Electrical and Electronic Engineering, Harbin University of Science and Technology, Harbin 150080, China)
Abstract:Single-motor wiper system through a mechanical connection to swing synchronously is widely used. This structure has the disadvantages such as large space occupation, inconvenient maintenance and so on. Dual-motor wiper system overcomes all these problems and reduces the system weight and mechanical noise, but reasonable solution of synchronous operation should be adopted. To solve this problem, this design adopted dual-motor synchronous control wiper system based on CAN(Controller Area Network) bus. The circuit of the controller was built and the reference trajectories of wiper arms were established according to the constraints of the swing process while the actual trajectory was drawn through fitting the collected position information. Based on the CAN bus, the dual-motor synchronous control was realized through master-slave synchronous control method. The results of experiments show that: dual-motor wiper system controller based on CAN bus could achieve synchronous operation of the wiper arms tracking those reference trajectories.
Keywords:dual-motor wiper system; synchronous control; trajectory generation; CAN bus
0 引 言
雨刷系統作为汽车安全系统的重要组成部分之一,主要用于清除风挡玻璃上的雨雪、灰尘等杂物[1]。在目前车辆前端雨刷系统中,采用较多的形式为单电机驱动同向刮刷方式[2],左右雨刷器之间采用机械连接来实现雨刷臂的同向往复摆动。这种结构不仅体积、重量大[3],维修也极其不便。因此许多汽车厂商提出了用电子系统替代机械连接的采用对向刮刷方式的双电机汽车雨刷系统[4]。在双电机汽车雨刷系统中,每个雨刷臂由安装在风挡玻璃两侧的两个电机分别驱动,因此它比传统的机械联动方式增加了10%的刮刷面积[5],为汽车驾驶者提供了更好的视野,减小了视线的盲区,同时还具有体积小,重量轻,噪音低,拆卸方便等优点。
在双电机汽车雨刷系统中,两电机组件内各配备一个控制器。为了保证两个雨刷臂安全运行不发生碰撞,两控制器之间必须实现雨刷臂位置信息的实时传递,使其同步摆动,并始终保持一定的安全距离。因此如何实现位置信息快速可靠地传递并实现两雨刷臂的同步摆动成为时下研究的热点[6-9]。文[7]提出采用DSP(digital signal processing)作为主控制芯片实现多电机同步运行的一种方法,有效地提高了多电机系统同步运行的稳定性。文[8]提出了一种基于时钟的同步控制方法,为两个控制器设置不同的时钟基准,从而改善了双电机雨刷控制系统的响应速度和抗干扰性能。文[9]通过采用交叉耦合控制器,提高了双电机同步控制系统的协调性和控制精度。以上文献都没有涉及两控制器之间位置信息传递的方式,这对于两雨刷臂的同步运行和系统故障时控制器的快速响应至关重要,为此本文提出了采用CAN(controller area network)总线的双电机同步控制雨刷系统控制器的设计。采用在汽车电子系统应用广泛的CAN总线作为通讯总线[10-12],目的是实现两个控制器之间位置信息的快速传递,且方便控制器与汽车其他电子控制单元之间进行可靠的数据交换。为实现对雨刷臂位置的实时检测,采用了零磨损的非接触式角度位置检测芯片。同时,为实现左右两侧雨刷臂的协调同步运行,采用了主从同步控制方式,选定司机侧的雨刷电机作为主控制对象,乘客侧的雨刷电机作为从控制对象。
1 采用CAN总线的双电机同步控制雨刷系统控制器结构
采用CAN总线的双电机同步控制雨刷系统控制器由司机侧和乘客侧两个控制单元组成,其中司机侧的控制单元为主控制单元,乘客侧的控制单元为从控制单元。每个控制单元主要由5个模块组成:微控制器模块,驱动模块,位置检测模块,电流检测模块,CAN总线通讯模块。其中,微控制器模块是整个雨刷控制器的核心。
本设计选用INFINEON公司的高性能、低功耗的单片机XC886作为主控制芯片。XC886是英飞凌XC88x系列增强型8位单片机[13],集成了4个16位定时器,6路PWM信号发生器,8通道10位AD转换模块等丰富的片上外设。在设计本控制器时,外部只需要为其配备位置检测信号预处理电路,驱动电路及过流保护电路即可。
XC886内部还集成了两个节点的MultiCAN模块[14],刚好满足控制器对于CAN节点的需求。一个用于控制器与汽车其他电子单元通讯,另一个用于主控制器将位置信息传递给从控制器。此外其内部集成的乘法/除法单元,能够快速实现16位乘除运算,大大加快了计算并更新PWM控制信号占空比的速率,使得雨刷臂位置控制更加精确。
2 采用CAN总线的双电机同步控制雨刷系统控制器各模块的设计
2.1 驱动模块设计
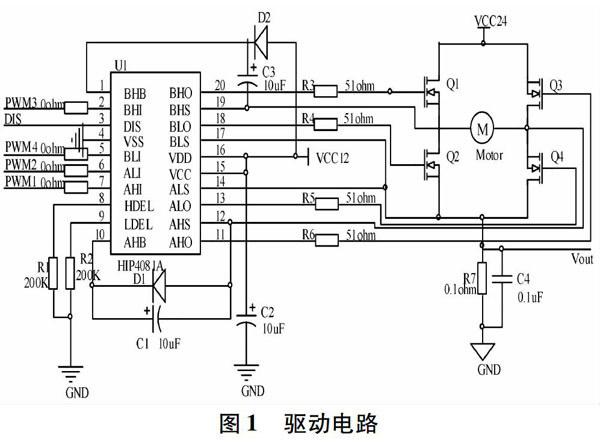
本设计主电路采用由4个功率MOSFET组成的H桥型拓扑结构,通过调节驱动MOSFET的PWM信号的占空比来实现电机的速度调节,其原理是通过改变电机电枢两端平均电压实现的调压调速。由于需要驱动4个MOSFET,本设计选用可独立驱动4个N沟道MOSFET的HIP4081A作为驱动芯片。该芯片最大工作频率可达1MHz,并且内部集成了欠压保护电路,同时可通过在HDEL、LDEL引脚外接电阻为PWM互补控制信号添加死区时间。DIS引脚为低电平有效的封锁芯片输出引脚。
驱动模块设计如图1所示。采用零欧姆电阻连接单片机引脚与驱动芯片,防止位于功率侧的驱动芯片工作过程中的大电流反向流入单片机损坏芯片。DIS引脚与电流箝位保护电路连接,当流过电机电流过大时封锁驱动芯片输出。HDEL、LDEL引脚外接200k的电阻添加了90ns的死区时间,防止软件添加的死区时间丢失。在H桥电路两个下桥臂与地之间串联了一个采样电阻用于电流检测。控制芯片输出的两对互补PWM控制信号分别接至BHI、BLI、AHI、ALI 4个引脚。由于采用双极性PWM,4个功率开关管被分为两组,V1和V4为一组,V2和V3为一组,同一组开关管的驱动波形相同,不同组驱动波形互补。当PWM占空比大于50%时,电机两端平均电压为正值,电机正转。反之,当PWM占空比小于50%时,电机两端平均电压为负值,电机反转。
2.2 雨刷臂位置检测模块设计
为实现两侧雨刷臂的协调同步运行,将雨刷臂实时的位置信息作为系统位置闭环反馈信号,用于与参考位置信息作差生成PID控制器的输入信号。所以,快速且精确的位置信息采集对于系统稳定安全的运行至关重要。
本设计采用Melexis公司的MLX90316作为位置检测芯片。MLX90316是基于三轴霍尔技术的角度式位置检测芯片[15],作为一种非接触式360°旋转感测芯片,它可以感测平行于芯片表面的磁场强度变化。只要将磁铁安装在雨刷臂末端与位置检测芯片平行正对的位置,MLX90316即可检测雨刷臂当前位置相对于0°位置(可通过软件任意设置)的角度。同时选用了芯片三种输出方式中精度较高模拟输出方式,将雨刷臂摆动角度范围0°~80°与0~4.5V电压线性对应。由于选用芯片的封装为TSSOP16(双片集成完全冗余设计),将集成的两个完全相同的芯片分别配置成沿正反两个方向测量雨刷臂相对0°位置的角度值,输出的两路电压信号如图2中OUT1和OUT2,经过A/D转换所得的角度值取算数平均值后作为当前雨刷臂的位置。采用这一方式增加了位置测量信息的准确性,削弱了由于A/D转换精度不够带来的误差。
2.3 电流检测模块设计
雨刷臂在汽车风挡玻璃附着冰雪或因其他外界因素阻挡的情况下无法正常摆动,电机会出现堵转现象,此时需要控制器及时做出响应使电机停转。本设计通过检测流过电机电枢的电流来判断电机是否发生了堵转现象。
H桥电路中采样电阻两端电压输入到电流检测模块经过两级反向放大电路后的输出,一方面经过滤波和钳位电路后输入到单片机的ADC模块用以计算当前流过电机的电流。另一方面输入到电压比较器与电流阈值折算成电压后的值做比较。由于不仅发生堵转故障时需要电机停转,雨刷臂正常运行也需要软件控制电机在风挡玻璃两侧边缘位置及时的停转,所以本文设计了电流箝位保护电路如图3所示。令电压比较器输出与单片机引脚P2.7经过一个或非门后连接到驱动芯片的DIS(低电平有效)引脚。电机正常运行时,电压比较器輸出为低电平;电机发生堵转时,流过电机电流大于阈值,电压比较器输出高电平。电机发生堵转现象时,控制器既可以通过电压比较器启动硬件保护动作封锁驱动芯片输出,又可以通过软件置位P2.7引脚禁止驱动芯片输出,使电机停转。停转后电机立即反转,使雨刷臂返回初始位置,并进行连续三次尝试,若仍无法通过该位置,则雨刷臂返回初始位置后系统停止运行,控制器确认当前系统处于故障状态,并产生故障警报。
2.4 微控制器模块设计——主从同步控制设计
为实现两雨刷臂同步运行,本设计采用了主从同步控制策略,系统工作原理如图4所示。角度式位置传感器将当前雨刷臂的位置作为反馈信号给控制芯片。主控制器将雨刷臂当前时刻位置与参考运行轨迹中该时刻的位置作差,结果送入PID控制器1。司机侧雨刷臂的位置通过CAN总线传递给从控制器作为输入,从控制器查表得到该时刻的参考位置,同理与当前时刻雨刷臂位置作差,将结果输入到PID控制器2。PID控制器输出更新了占空比PWM控制信号,并将PWM信号输入到驱动模块,驱动两侧雨刷电机带动各自雨刷臂始终跟踪各自参考运行轨迹协调同步摆动。
2.5 CAN总线通讯模块
本设计采用INFINEON公司的TLE6250作为CAN收发芯片。通过将INH引脚下拉,RM引脚上拉选择芯片始终工作在收发模式,如图5所示。在单片机的CANTXD引脚与TLE6250的RXD引脚之间加入两级反相器,以提高信号的稳定性和抗干扰能力。同时,在CAN总线两端增加终端电阻,吸收信号的反射和回波。
3 仿真和实验结果分析
3.1 CAN总线上位置信息的传递
图6所示为雨刷臂摆动过程中CAN总线上主控制器向从控制器发送的一帧报文的解码结果,由于是对CANL线上的数据进行的解码,所以解码结果为矩形波所对应数码的反码。可以看出该时刻CAN总线传递的数据为Byte:11,则司机侧雨刷臂位置芯片输出经AD转换后结果为0x11=17,根据AD转换精度为8位,对应最大摆动角度80°,从控制器由17/255×80=5.33可知,司机侧雨刷臂当前位于角度5.33°处。这样,通过CAN总线主控制器就完成了一次向从控制器位置信息的传递。
3.2 两侧雨刷臂运行轨迹的规划
本文所设计的双电机驱动汽车雨刷控制器高速档对应运行周期T=1s,低速挡对应运行周期T=1.2s。下面仅就系统处于高速挡时的情况,对司机侧和乘客侧雨刷臂参考运行轨迹进行规划。司机侧和乘客侧雨刷臂起始摆动位置相对于位置芯片设置0°分别为0.0698rad和2.967rad。雨刷系统在运行过程中的约束条件有:最大摆角θ=1.3788rad,角速度θ′≤9rad/s,角加速度θ″≤60rad/s2,两雨刷臂之间距离d≥50mm。则司机侧轨迹函数θd(t)的约束条件如表1所示。
由于雨刷臂到达最远端过程和返回初始位置过程为互逆过程,雨刷臂一个周期内经历两次启动加速和制动减速至0的过程。所以对应轨迹函数关于t=0.5对称,在区间0~0.5s斜率从零开始先增大,后减小至零。根据轨迹函数这些特性选择高斯函数:
Gauss=ae-(x-b)22c2(1)
作为核心,构建司机侧轨迹函数为:
θd(t)=2.967-1.3788e-(t-1/2)20.1(2)
其在MATLAB中图像如图7中雨刷臂参考运行轨迹。
乘客侧轨迹函数为
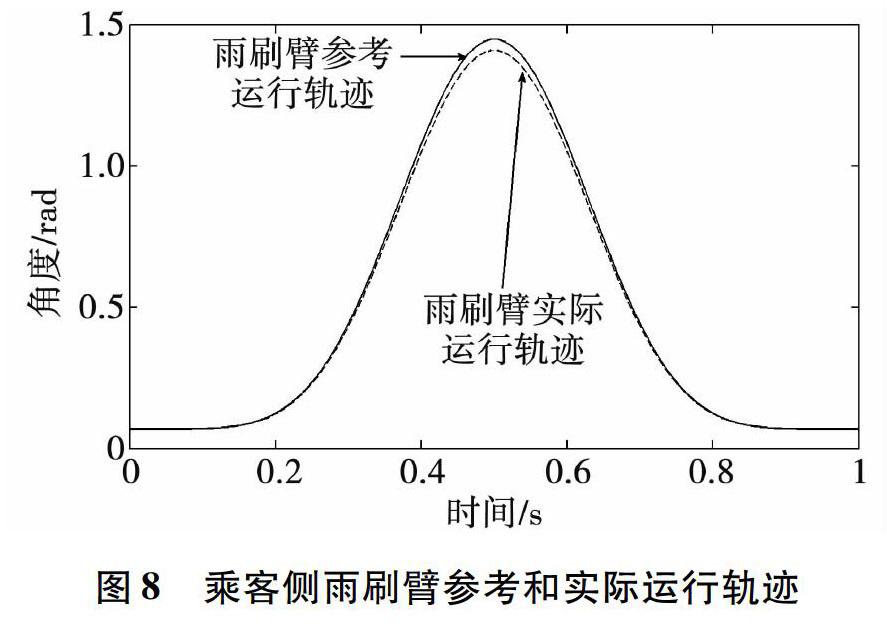
θp(t)=0.0698-1.3788e-(t-1/2)20.1(3)
其在MATLAB中图像如图8中雨刷臂参考运行轨迹。
图7和图8中司机侧和乘客侧雨刷臂实际运行轨迹是将系统采集到的雨刷臂一个摆动周期内时间与位置对应的数据通过CAN总线发送给上位机,经过MATLAB曲线拟合后形成。可以看出雨刷臂能够紧密跟踪参考运行轨迹。
4 结 论
本文提出了采用CAN总线的双电机同步控制雨刷系统控制器的设计方法。建立了雨刷臂的参考运行轨迹,并控制雨刷臂实现了对其参考运行轨迹的跟踪,通过CAN总线对位置信息的传递,实现了两雨刷臂协调同步运行。实验结果表明,本控制器控制的双电机汽车雨刷系统同步运行稳定,工作可靠。
参 考 文 献:
[1] 赵岩,王哈力,蒋贵龙. 汽车智能雨刷系统的设计[J]. 电子科技,2007(2):70-72.
[2] 邵卫. 汽车雨刷机构创新设计研究[J]. 现代制造技术与装备,2016(1):32-33.
[3] JEAN L. On the Synchronization of a Pair of Independent Windshield Wipers[J]. IEEE Transactionson Control System Technology, 2004,12(5):787-795.
[4] 张生平,刘继,杜琛. 新型城市轨道车辆雨刮器的研制[J]. 城市轨道交通研究,2013(10):48-49.
[5] CATALIN A, CLAUDIU P. Dynamic Modeling and Control of the Windshield Wiper Mechanisms[C]. Wseas Transactions on Systems, 2009:825-834.
[6] 徐明浩. 双电机雨刷器硬件平台与控制算法研究[D]. 长春:吉林大学, 2012:24-34.
[7] RAHUL D Pawar, SHAH S K.A Review: Front Windshield Wiper Controller System for Synchronisation of Two Wiper Motors[C]//International Conference on Pervasive Computing(ICPC). University of Southern California, 2015:100-105.
[8] BOUDJIT K, LARBES C. A New A approach for Synchronisation Multiple Motors using DSP[C]// International Conference on Systems, Signal Processing and Electronics Engineering (ICSSEE), Dubai,2014:216-220.
[9] 趙海燕,陈虹,李姝,等. 基于微分平坦的双电机雨刷系统控制器设计[C]// Proceedings of the 29th Chinese Control Conference,Beijing,July 2010:29-31.
[10]蒋磊. 双电机驱动雨刷系统控制方法研[D]. 哈尔滨:哈尔滨工业大学. 2014:34-38.
[11]王仲文,马原,段瑞珍,等.智能窗CAN总线控制系统设计[J]. 哈尔滨理工大学学报,2013,18(4):20-24.
[12]杨建军. CAN总线技术在汽车中的应用[J].上海汽车,2007(6):32-34.
[13]朱元,肖宇,吴志红. 基于XC886单片机的门控系统LIN总线通信模块设计[J]. 电子元器件应用,2009(8):25-28.
[14]黄俭波,朱文. AT25256与XC886的接口设计与实现[J]. 自动控制与检测, 2011(5):56-59.
[15]曹平军,于晓东,窦珂,等. 基于MLX90316的磁性角度传感器设计[J]. 电子世界,2013(18):135-136.
- 地方本科高校信息化建设应用研究—以湖州师范学院为例
- 基于“应用型、技能型人才培养”的《MS Office高级应用》课程教学模式改革研究
- 项目教学法在高职图形图像处理教学的应用分析
- 基于FIAS系统的初中语文课堂师生互动行为分析研究
- 《自然语言处理》课程教学分析与实践
- 高职院校大学计算机基础课程教学方法研究
- 以计算思维能力培养为核心的案例式程序设计教学探索与实践
- 浅淡虚拟现实技术在教学中的应用
- “大创项目”实践与课程教学融合模式研究
- 高职计算机课程思政教学改革探究
- 基于Spoc混合式教学模式的探索和实践
- “巧”用信息技术,打造高职学前教育专业生本智慧课堂
- 混合式教学在计算机网页设计与制作课程中的应用
- 信息管理专业统计学教师教学能力提升的几点建议
- 如何通过教学信息化提升中职教师的教学能力
- “双万计划”背景下构建“闯关式”Java类课程教学资源的思考
- 高职软件专业基于SPOC课程流程重构的实施研究
- 刍议基于慕课发展的高校计算机基础课程改革探讨
- 计算机编程类学科学生自学能力培养方法研究
- 基于混合式教学的专业教学资源建设研究与实践
- 《前端框架技术》线上线下融合教学的研究与实践
- 以计算机实践能力培养为目标的大学计算机课程教学改革研究
- 以创新创业为核心的计算机操作类课程教学模式改革研究与实践
- 基于课程思政的计算机组成原理教学设计探索
- 几何画板优化数学课堂教学
- desists
- desk
- desk clerk
- deskclerk
- desker
- deskest
- deskfast
- deskill
- deskilled
- deskilling
- deskjob
- desk job
- deskjockey
- desk jockey
- desk rage
- deskrage
- deskresearch
- desk reˌsearch
- desks
- desk-top
- desktop
- desktop-computer
- desktopcomputer
- desktop computer
- desktop-computers
- 费气
- 费猜
- 费率
- 费用
- 费用繁多
- 费用自理
- 费白日
- 费省效宏
- 费眼
- 费礼
- 费神
- 费神劳心
- 费米
- 费耗
- 费脑筋
- 费脚手
- 费舌劳唇
- 费舌哓舌
- 费舌尽唇
- 费芯(心)
- 费解
- 费言
- 费话
- 费负
- 费财