钟昊

摘要:多无人机协同无源定位移动辐射源目标,需要实时优化调整多机组合航向,不断追求多机与目标之间的动态最优构型,以提高和稳定定位精度。针对传统集中式优化方法由于航向计算时延和信息分发时延造成的定位精度低和稳定性差,本文提出一种多机航向协同自主生成方法,通过离线构建多样化构型和最优航向数据集,基于图神经网络离线机器学习组合航向与最优构型下的隐式规则,线上各无人机航向决策神经网络基于一致实时态势,自主预测本机航向和协同生成最优航向组合。仿真验证表明,该方法相对于传统方法能够更快达到更高定位精度,且提高了定位跟踪稳定性。
Abstract: In order to improve and stabilize the positioning accuracy, it is necessary to optimize and adjust the Multi-UAV combination heading in real time, and constantly pursue the dynamic optimal configuration between the Multi-UAV and the target. In view of the low positioning precision and poor stability caused by the time delay and information distribution delay of the traditional centralized optimization method, a Multi-UAV combination heading cooperative autonomous generation method is proposed in this paper. The multiple configurations and optimal heading data sets are constructed off line, and the combination course and the optimal structure are machine learned off-line based on the graph neural network. Under the implicit rule, the line decision neural network based on the unmanned aerial vehicle (UAV) is based on the consistent real time situation and independently predicts the course direction and cooperative generation of the optimal course combination. Simulation results show that the proposed method can achieve higher positioning accuracy and improve the stability of location tracking compared with traditional methods.
關键词:多机无源定位;航向自主生成;图神经网络;动态构型;克拉罗美下界
Key words: multi-UAV passive location;autonomous generation heading;graph neural network;dynamic configuration;Cramer-Rao Lower Bound
中图分类号:V24;TP3? ? ? ? ? ? ? ? ? ? ? ? ? ? 文献标识码:A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文章编号:1006-4311(2020)12-0254-05
0? 引言
随着无人机集群技术、现代电子战技术和航空通信技术的迅猛发展,多无人机对移动信号辐射源目标进行无源协同定位,在军事侦察、环境监测、反恐维稳和应急救援诸多领域具有巨大应用潜力。在运动状态下,多无人机与目标的之间的动态构型,即各无人机与目标之间的实时距离,以及任意两架无人机与目标之间的实时角度,直接影响多机协同无源定位精度以及稳定跟踪效果。如何在线生成各无人机实时航向指令,实现多无人机与目标之间的最优动态构型,从而提高无源定位精度和跟踪稳定性,成为热点研究问题之一[1-2]。
当前针对面向无源定位的多机航向动态生成问题,主要采用集中式实时优化方法(Centralized Real-Time Optimization,CRTO)[3-6],基于测角、测频或测TOA等无源定位方式,获得目标位置估计值后,以卡拉美罗下界卡拉罗美下界(Cramer-Rao Lower Bound,CRLB)[7]为定位精度指标,并假设环境电磁噪声服从高斯分布,然后实时计算搜索下一时刻CRLB最小的多机组合航向,最后逆推各无人机当前航向指令。该方法存在两个问题,一是无源定位精度对组合航向敏感,需要对航向粒度进行细致划分,随着无人机数量增多,可选组合航空决策变量空间呈指数增加,从而导致计算延时过大,难以满足对高速移动目标定位需求;二是需要对所有无人机的航向指令进行集中计算,然后分发给各无人机,增加了通信延时,且存在中心节点,在作战环境下,造成无人机集群抗毁性差。
针对CRTO方法存在的问题,本文提出分布式协同自主生成方法(Distributed Cooperative and Autonomous Generation Approach,DCAG),即基于自组织协同思想和机器学习方法[8-9],为每架无人机最优航向决策构建均构建一个多隐含层神经网络,并大样本仿真多无人机与目标的不同构型数据集和离线搜索最优航向标签集,实现神经网络线下机器学习如何针对不同构型生成最优航向,线上根据真实无源定位信息,自主快速输出最优航向指令,确保多机自同步按照最优航迹飞行,不断减小定位误差和保持跟踪稳定性,使得多机无源定位中计算量大耗时长的航向组合实时优化问题,被转化为低功耗低时延的分布式在线预测问题,使得该问题得以有效解决。
1? 问题描述与建模
理论上单机测向,双机即可完成定位,但是存在环境电磁噪声,定位会存在误差。在信号处理和定位算法确定的条件下,且假设无人机速度方向始终与航向始终保持一致,要提高对移动目标的无源定位精度,需要在线组合优化多无人机实时组合航向,从而直接决定多无人机下一时刻航迹点,达到不断追求多无人机与目标之间的动态最优构型的目的。由于CRLB可以屏蔽无人机辐射信号和环境噪声对定位精度的影响,因此通过计算CRLB值,定量比较多无人机可选组合航向下的不同定位精度,从而找出CRLB最小的组合航向,即为使得定位精度最高的最优航向组合。
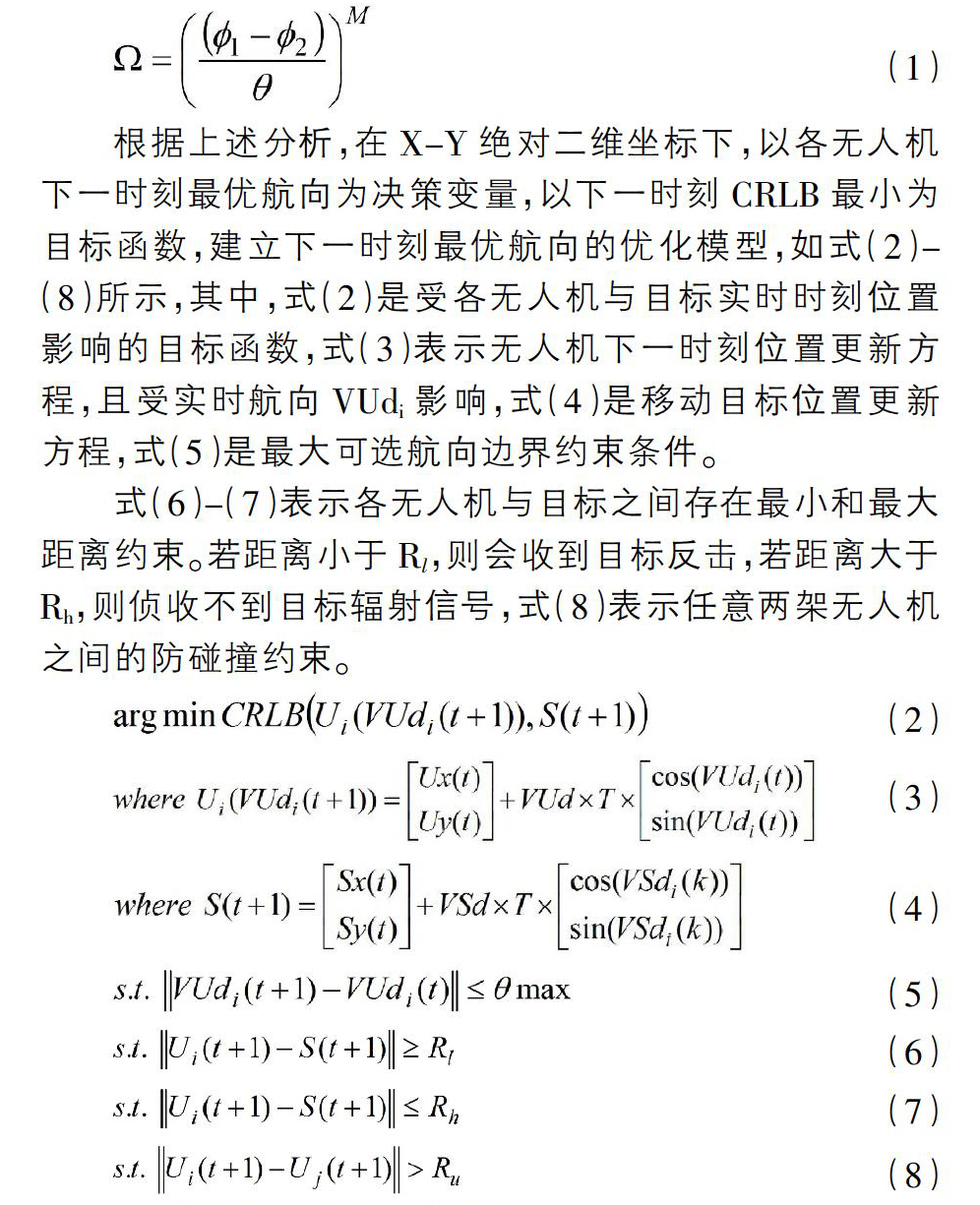
假设无人机数量为M,可选航向粒度为θ,无人机可机动航向角区间为[?准1,?准2],则每一时刻多无人机协同航向组合可选决策空间数量规模如式(1)所示,随M的增加呈指数增长,为NP-Hard问题。
根据上述分析,在X-Y绝对二维坐标下,以各无人机下一时刻最优航向为决策变量,以下一时刻CRLB最小为目标函数,建立下一时刻最优航向的优化模型,如式(2)-(8)所示,其中,式(2)是受各无人机与目标实时时刻位置影响的目标函数,式(3)表示无人机下一时刻位置更新方程,且受实时航向VUdi影响,式(4)是移动目标位置更新方程,式(5)是最大可选航向边界约束条件。
2? 传统集中式实时优化方法
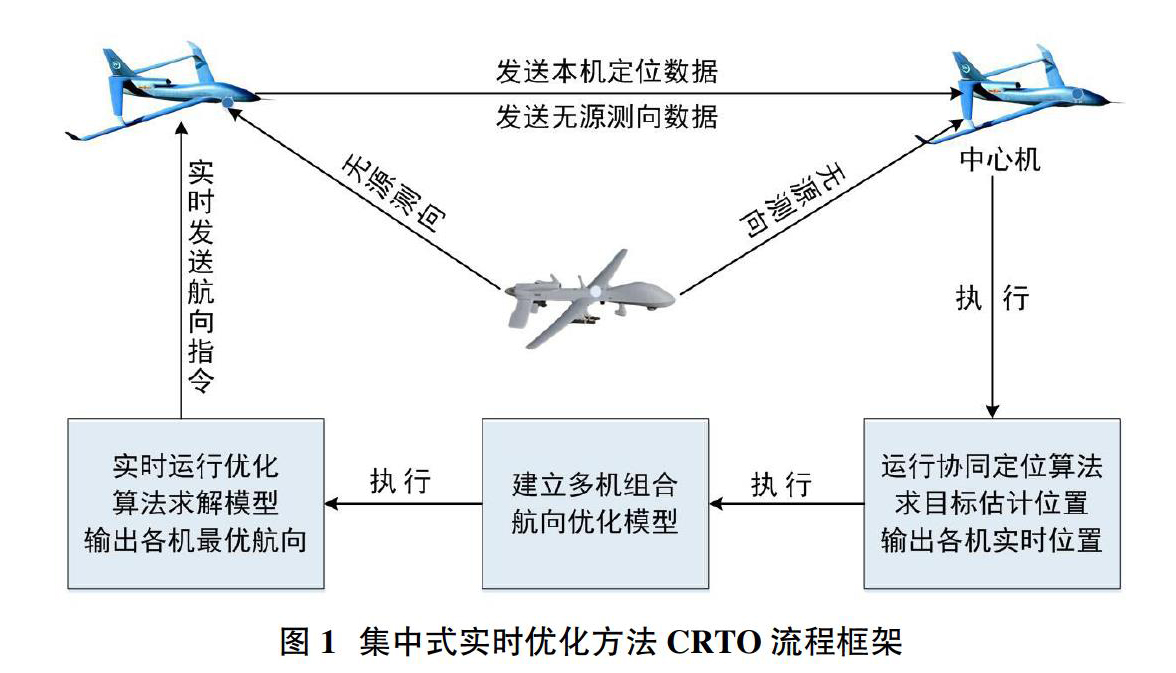
针对上述多无人机航向组合优化问题,传统集中式实时优化方法CRTO需要将各无人机实时测向数据及其实时定位信息,发送至中心无人机,根据协同定位算法结算目标估计位置,然后以式(2)所示目標函数,面向大规模组合优化变量空间,运用启发式或超启发式等智能优化算法进行求解,然后通过搜索寻优得到多机组合最优航向,最后中心无人机通过机载数据链将每一时刻最优航向指令不断分发给其他对应的无人机,如图1所示。根据工程经验,由实时优化计算各无人机组合航向和分发航向指令带来的延时超过2秒以上,易造成精度降低和跟踪稳定性降低。
3? 分布式协同自主生成方法
3.1 方法框架
针对CRTO方法带来的延时过长问题,本文所提DCAG方法针对CRLB直接反映构型对定位精度影响这一特点,在地面离线仿真生成大样本多无人机与目标的构型数据,并运用智能优化算法离线搜索每种构型下各无人机最优航向组合,由此一对一地形成面向每架无人机的带标签数据集,实现离线训练测试各无人机航向决策图神经网络,在线使用训练好的各无人机神经网络,如图2所示。
通过DCAG方法,各无人机只需要实时共享各自的定位信息和测向数据,在求出目标估计值一致的条件下,就能基于图神经网络快速自主运算生成本机最优航向,从而避免在线实时优化NP-Hard问题,造成的过长延时。同时,由于各机神经网络离线学习到自主协同生成最优航向组合的隐式规律,在线生成实时最优航向天然即为组合最优,从而也避免了由于中心计算组合航向需要分发带来的通信延时。
3.2 图神经网络构建
图神经网络[10,11]是为了在图结构的数据信息基础上进行学习而建立起来的。本文所研究多架无人机在定位过程中的航迹生成,其本质属于图数据下的构型变换,因此本文采用图神经网络进行学习训练,实时生成不同时刻每架无人机航迹角输出。
为了实现多无人机之间的在线协同飞行以减小定位误差,需要将所有无人机当前时刻到目标的构型图作为每架无人机神经网络的输入。在目标真实位置未知条件下,以目标无源定位估计值近似为目标真实位置。神经网络输出则设计为所控制无人机的下一时刻最优航向。神经网络结构采用多个隐含层和全连接结构。设无人机数量为M,则隐含层数量和每个隐含层的节点数可以设置为M和2M。
3.3 网络离线训练测试
按照无人机航向决策图神经网络的输入和输出构建好数据集和标签集后,采用TensorFlow[12]进行网络的离线训练和学习。在训练过程中需要注意三点:一是对于神经网络在两种坐标轴角度下表示预测航向,需要分别与真实最优航向相减后,以偏差最小值作为损失函数值;二是选择Adam学习算法优化网络的权重和阈值;三是在每一轮训练完成后都输入测试数据集,判断损失函数值是否连续变小作为训练终止条件之一,以防止过拟合,具体流程如图3所示。
4? 仿真验证分析
4.1 仿真示例描述
以双机无源定位移动通信辐射源仿真示例,验证本文所提DCAG方法的有效性,并假设如下:①无源定位算法采用AOA到达角测量法;②信噪比为0.05;③双机速度在单次仿真中固定,多次仿真中变化范围为[120,200];④目标速度大小在单次仿真中固定,多次仿真中变化范围为[100,180];⑤目标速度方向始终为双机位置连线中点至目标方向;⑥无人机每秒内完成50次测向信号采样;⑦目标与各无人机之间的距离不大于15000,不小于1000;⑧双机之间的距离不小1000;⑨用于离线训练各无人机无源定位航向图神经网络产生的部分数据集如表1所示。
- 如何发挥信息技术在小学数学课堂中的辅助作用
- MOOC与大数据技术在大学计算机基础教学中的应用
- 谈《网店装修》课程的教学组织与实施
- 基于网络教学平台的混合式教学设计
- 高职网络专业课程信息化教学设计与实施
- VRRP与BFD在改造大二层承载网中的应用
- 离散数学实验教学实践研究
- 基于工作过程系统化的《VB6.0程序设计》课程设计
- 基于5G环境下的艺术教学模式研究
- 基于面向应用能力培养的Java课程群构建探讨
- 基于消费行为理解与分析的用户兴趣建模方法
- 跨终端、多专业数字化流程解决方案的设计与应用
- 农村“气代煤”安全评价汇总中Excel及VBA的应用
- 基于Leslie模型分析全面二孩政策对泰州市人口结构影响
- 多功能无人机的开发设计
- 多载波OFDM系统研究及仿真实现
- 实用照明节电自控开关设计与实现
- 3DS MAX软件中的灯光应用
- 计算机软件技术在大数据时代的应用分析
- TrueType字体在图形图像处理软件中的应用分析
- 基于工作过程的教学改革在软件专业中的实践
- 大数据环境下计算机应用技术研究
- 基于单片机的多功能电子时钟的设计
- Web2.0下Open social给数字图书馆的启示
- 利用RFID技术实现零售仓储物流领域应用
- enrolls
- enrolment
- enrolments
- enrols
- en route
- en routes
- ensaffron
- ensconce
- ensconced
- ensconces
- ensconcing
- ensemble
- ensembles
- enshrine
- enshrined
- enshrinement
- enshrinements
- enshrines
- enshrining
- ensign
- ensigncies
- ensigncy, ensignship
- ensigns
- ensignships
- enslave
- 酒逢知己
- 酒逢知己千杯少
- 酒逢知己千杯少,话不投机半句多
- 酒逢知己千盅少,话不投机一句多
- 酒逢知己千盅少,话不投机半句多
- 酒逢知己千钟少,话不投机一句多
- 酒逢知己千钟少,话不投机半句多。
- 酒逢知己饮,诗向会人吟
- 酒道真性
- 酒郡封移
- 酒酣
- 酒酣兴逸
- 酒酣微醉时的神态
- 酒酣性逸
- 酒酣耳热
- 酒酸不售
- 酒酽春浓
- 酒酽花浓
- 酒醅
- 酒醉
- 酒醉以后神志不清
- 酒醉依门帘——靠不住
- 酒醉千日
- 酒醉后怒目瞪眼
- 酒醉后所说的话