杨尚文

摘要: 竖向信号思想实验对时间延缓效应进行了阐述。在该思想实验中,若将信号机水平设置,光的发射与反射的方向与X轴平行,那么情况可分别描述。光的运动路径的差异只会影响计算过程,不影响这两个惯性参照系之间的时间观测比值。两个惯性参照系之间的时间观测比值为γ。从两个惯性参照系观测一个物体的运动,时间观测比值为γ。一个小球沿X轴方向被恒定的力加速,当从两个惯性参照系中观察小球的運动时,观察到的力值是不同的。这可以称为“力变效应”。
Abstract: The effect of time delay is expounded in the thought experiment of vertical signal. In this thought experiment, if the signal transmitter is set horizontally, ?the direction of light emission and reflection is parallel to the X'-axis, then the situation can be described separately.The difference of the path of light only affects the calculation process, but not the time observation ratio between the two inertial frames of reference. The time observation ratio between two inertial frames of reference is γ. The observation ratio of time is γwhen the motion of an object is observed from two inertial frames of reference. A small ball is accelerated in the direction of the X'-axis by a constant force, and the observed value of the force is different when the motion of the ball is observed from two inertial frames of reference. This can be called the force change effect.
关键词:时间观测比值;基础惯性系;力变效应;曲面
Key words: time observation ratio;basic inertial frame of reference;force change effect;curved surface
中图分类号:TH161+.3 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文献标识码:A ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文章编号:1006-4311(2020)19-0197-04
1 ?不同惯性系之间的时间观测比值
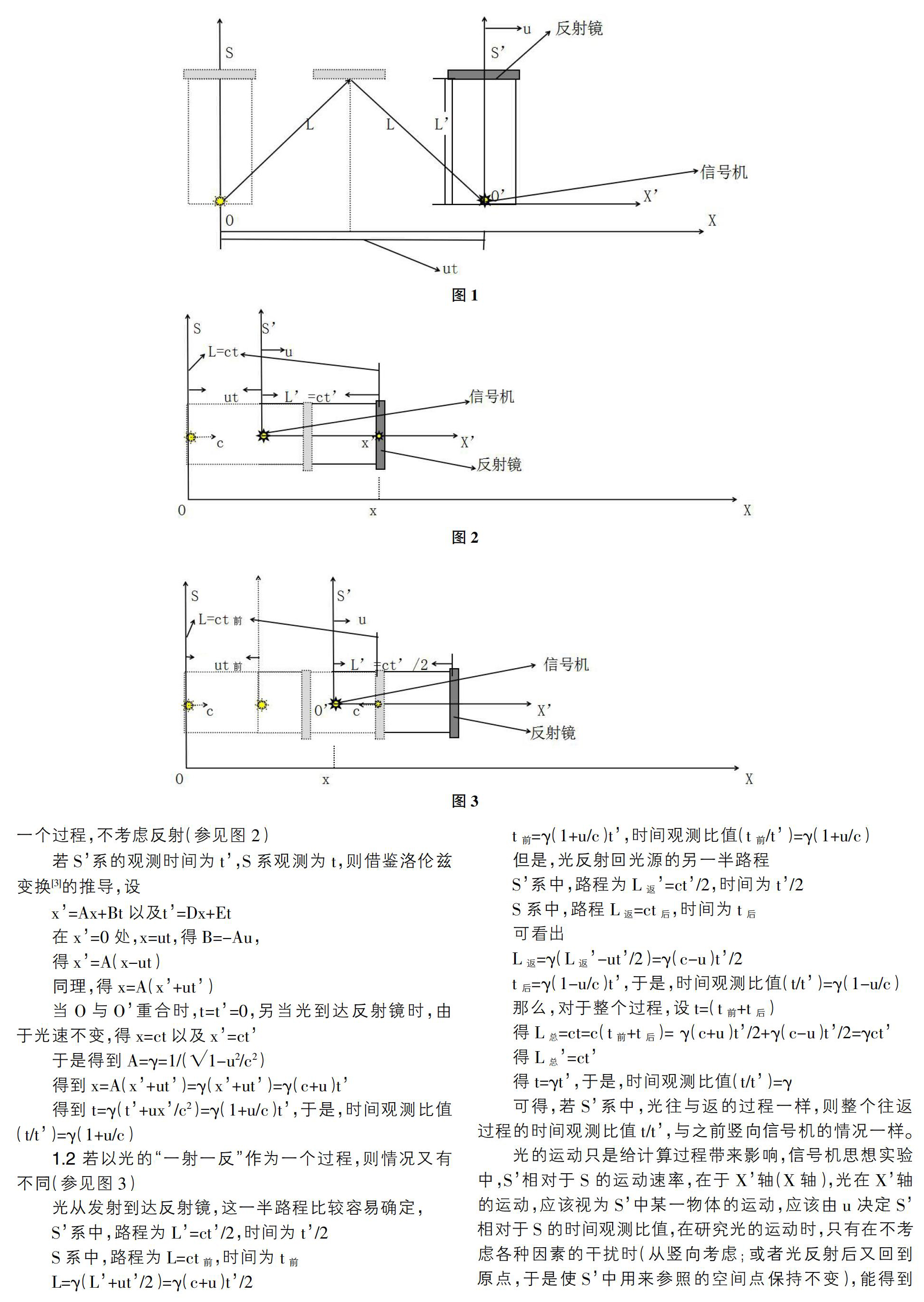
谈到相对论时间延缓效应[1],一般以竖向信号机思想实验为例进行说明(参见图1)。
该竖向信号机相对于S系静止,信号发射与反射路线,与X轴垂直,光的“一射一反”作为一个过程,该过程经历的时间,若S系观测为t,S系观测为t,有γ=1/(√1-u2/c2)[2],t=γt,同一过程,时间观测比值(t/t)=γ。
可得,若S系中,光往与返的过程一样,则整个往返过程的时间观测比值t/t,与之前竖向信号机的情况一样。
光的运动只是给计算过程带来影响,信号机思想实验中,S相对于S的运动速率,在于X轴(X轴),光在X轴的运动,应该视为S中某一物体的运动,应该由u决定S相对于S的时间观测比值,在研究光的运动时,只有在不考虑各种因素的干扰时(从竖向考虑;或者光反射后又回到原点,于是使S中用来参照的空间点保持不变),能得到真正的两系时间观测比值,两惯性系之间的时间观测比值只与它们的相对速率u和c有关,比值为(t/t)=γ。
当两惯性系组合的相对速率u在坐标的三个维度中可分解有都不为0的分量时,分量为ux,uy,uz,则同样可以参照竖向信号机思想实验得出三个维度的时间观测比值γx,γy,γz,除了c之外,三个比值分别只与ux,uy,uz有关,很明显,|ux|,|uy|,|uz|都小于|u|,故两个惯性系之间时间观测比值,在u方向(或相反方向)上时得值最大。这个说法有待探讨。
从惯性系P观测处于某惯性系P中的物体A时,从宏观上,把A与P的关系,总可以认为A存在于P中,其运动、延存的场所,与P保持静止,在时间上具有同一性,反之,从P观测P中的A,也一样。那么,若A有一运动过程,则两个惯性系之间的时间观测比值,等于从两个惯性系观测A运动过程时,该过程所经历时间的观测比值。当然,这不等同于把物体本身看成另一个不同的参照系的情况。
于是,无论A的运动如何、状态如何,认为从S系观测,A在S中的时间流速与S系本身的时间流速相同。
也就是,S系与S系两者之间的时间观测比值,只与c以及两系相对速率u有关,为(t/t)=γ,而对于小球A,分别从S系与S系进行观测,时间观测比值,同样,(t/t)=γ。
2 ?不同惯性系之间的力变效应
假设有一箱体,处于惯性系S中,并且与S保持静止,箱体内底部表面水平光滑,箱体内,有刚体光滑小球A,静止质量为m0,落在箱体底部表面左沿并且静止,A在S中的初速率为0,动量为0,在一恒力f推动下,A向右滑动,题中小球直径忽略,并且A与外界无任何其他作用,若在δT秒后,A到达右沿,有惯性系S,若S系相对于S系的速率为u,设在S系中观测,小球从左沿到右沿的时间为t,由于存在着时间流逝的观测差异,δT≠δT,由相对论时间延缓效应可知,从S系观测,δT=δT/(√1-u2/c2)(参见图4)。
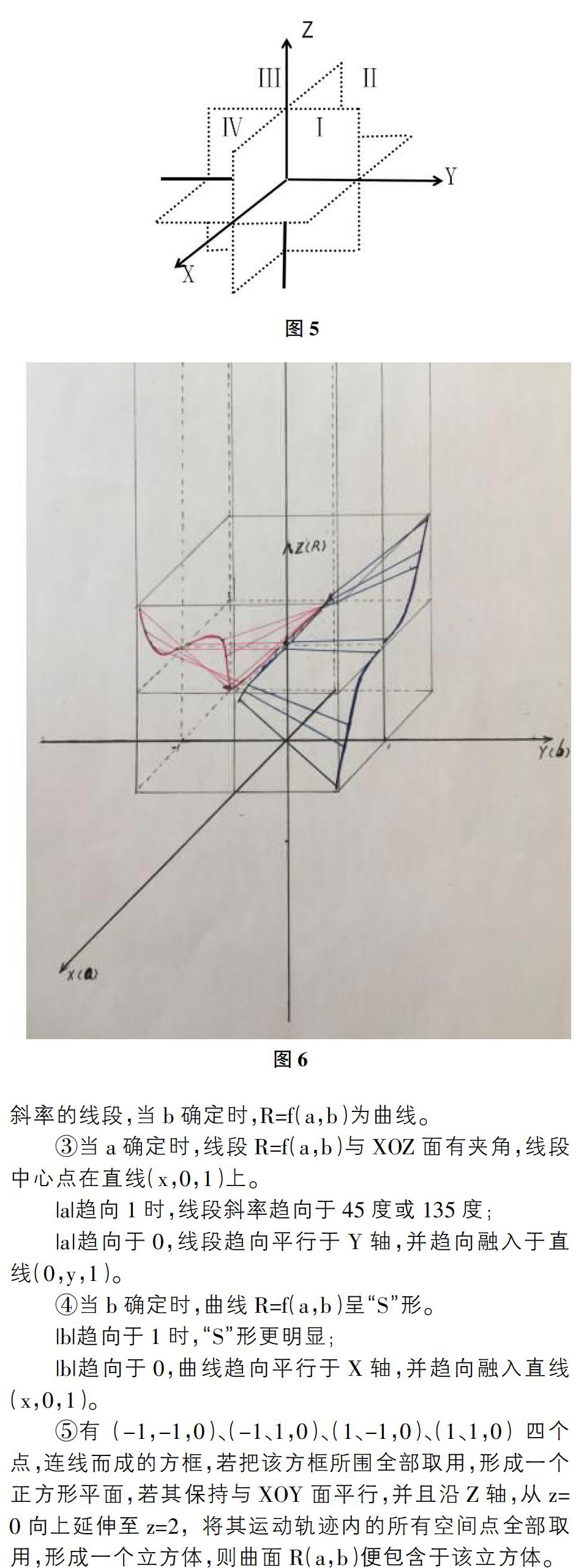
⑤有(-1,-1,0)、(-1、1,0)、(1、-1,0)、(1、1,0)四个点,连线而成的方框,若把该方框所围全部取用,形成一个正方形平面,若其保持与XOY面平行,并且沿Z轴,从z=0向上延伸至z=2,将其运动轨迹内的所有空间点全部取用,形成一个立方体,则曲面R(a,b)便包含于该立方体。
⑥若有十字杆,初始时与X轴Y轴重合,若十字杆与XOY面保持平行,并且沿Z轴,从z=0向上运动至z=2,将曲面切割成四块,使a和b都不等于0,当a与b都不等于-1和1时,得到四曲面r(a,b)。
⑦换一个角度,若有观测者位于X负轴处,且x<1,对四曲面进行观测,则四曲面可由这样一个动作形成:有平行于平面YOZ的线段;最初状态1时,该线段与XOZ面的夹角为45度或135度,线段中心点坐标为(-1,0,1),两端点为(-1,1,2)和(-1,-1,0),若该线段保持与平面YOZ平行,并远离观测者,并且以直线(x,0,1)为轴,逆时针旋转九十度,到达终点时,与XOZ面的夹角为135度或45度,线段中心点坐标为(1,0,1),两端点为(1,1,0)和(1,-1,2),达到状态2,结束。
那么,该线段在这一过程中所经历的所有空间点的集合(不计状态1和状态2所涉及的空间点,不计线段中心点和两端点所经历的空间点),便形成四曲面r(a,b)。
⑧用(a,b)与(-a,-b)代入代数式,数值相等,可知,曲面上的点关于Z轴对称。
⑨用(a,b)与(-a,b)代入代数式,可看出,曲面上的点关于直线(0,y,1)对称。
⑩用(a,b)与(a,-b)代入代数式,可看出,曲面上的点关于直线(x,0,1)对称。
通过坐标曲面图进行说明(参见图6,不够精确,作示意图参考)。
综上,因v=ac,u=bc,可得,函数r(v,u),其中-c ①当v与u同为正或同为负时,0 这里,|v|趋向c或|u|趋向c,都使r趋向减少,当|v|和|u|都趋向c时,r趋向于0。 ②当v和u为一正一负时,1 这里,|v|趋向c或|u|趋向c,都使r趋向增加,当|v|和|u|都趋向c时,r趋向于2。 ③当|v|趋向0或|u|趋向0,都使r趋向于1,当|v|和|u|都趋向0时,r趋向于1。 上述可统称为“力变效应”——作用于确定物体上的确定力,在不同惯性系中观测,力的数值会发生变化。 参考文献: [1]360百科.《狭义相对论》[OL].https://baike.so.com/doc/2322955-2457084.html [2]百度百科.《狹义相对论》[OL].https://baike.baidu.com/item/狭义相对论/473499?fr=aladdin#4_5. [3]360百科.《洛伦兹变换》[OL].https://baike.so.com/doc/3462402-3643107.html.
- 宁远县兔产业发展现状及建议
- 《湖北畜牧兽医》投稿须知
- 广西梧州:生态养殖推广到贫困地区
- 青海打造全国草地生态畜牧业试验区
- 试管倒插法诊断家畜血吸虫病效果观察
- 肉鸡嗉囊病变的症状及防治
- 一例鸡巴氏杆菌病的诊治
- 鸡呼吸道疾病的防控措施
- 鸡传染性肝炎的诊断与防治
- 倚象镇家禽寄生虫病防治措施
- 林下土鸡养殖技术
- 湖羊种公羊饲养管理技术
- 生猪屠宰检疫中异常猪肉的检测与处理
- 肉羊饲养管理技术
- 种蛋的储存条件对孵化率的影响
- 新购仔猪的饲养管理措施
- 规模化兔场提高仔兔成活率的措施
- 山区山羊生态养殖关键技术探讨
- 蜂胶在畜牧兽医上的应用
- 奶牛常见行为分析
- 发酵床养猪与水泥地面养猪的效果对比分析
- 山羊同时接种口蹄疫O—A—亚Ⅰ型三价灭活疫苗和小反刍兽疫活疫苗后30d内抗体动态研究
- 大足黑山羊捻转血矛线虫和莫尼茨绦虫混合感染的诊治
- 小动物中毒的解救措施
- 母猪产后食欲减退原因分析与防治措施
- superexerted
- superexerting
- superexertion
- superexertions
- superexerts
- superexpand
- superexpanded
- superexpanding
- superexpands
- superexpansion
- superexpansions
- superexpectation
- superexpectations
- superexpenditure
- superexpenditures
- superexpensive
- superexplicit
- superexplicitly
- superexport
- superexported
- superexporting
- superexports
- superexpress
- superexpresses
- superexpression
- r2022090410004703
- r2022090410004704
- r2022090410004705
- r2022090410004706
- r2022090410004707
- r2022090410004709
- r2022090410004710
- r2022090410004711
- r2022090410004712
- r2022090410004714
- r2022090410004716
- r2022090410004717
- r2022090410004718
- r2022090410004720
- r2022090410004721
- r2022090410004722
- r2022090410004723
- r2022090410004725
- r2022090410004726
- r2022090410004728
- r2022090410004729
- r2022090410004730
- r2022090410004731
- r2022090410004732
- r2022090410004734