赵然+万洪林+杨济民
摘要:随着视频技术的快速发展,早期基于红外对射、重力感应的统计技术难以实现密集客流量统计,基于视频序列的统计方法已经逐渐成为主要技术手段,本文利用改进的视频序列差分算法,将二维图像序列特征转化为一维图像特征,大大节约了处理时间。同时本文将此算法应用于Hi-3515处理器,实现了一种高精度区域检测密集人群流量计数系统,系统实验表明,本文算法能够达到双向人流量实时计数,且准确率90%以上。
关键词:人流计数;Hi-3515;帧间差分法;中值滤波;检测区域
中图分类号:TP391 文献标识码:A 文章编号:1009-3044(2016)34-0227-05
Abstract: With the rapid development of video technology, the statistical techniques on the basis of infrared radiation and gravity sense is difficult to achieve dense passenger flow volume statistics. The statistical method based on video sequence has become the main technique. In this paper, we can transform two-dimensional image sequence features into one-dimensional image features with making use of the improved the video sequence difference algorithm, this method is able to save the processing time significantly. Meanwhile, by applying this algorithm to the Hi-3515 processor we implement a high-precision regional counting system to detect dense passenger flow volume. System experiment shows that the algorithm in our paper can achieve bidirectional passenger flow volume counting, and the accuracy rate exceed 90%.
Key words:passenger flow volume counting; Hi-3515;frame difference; median filtering; region detection
運动目标检测一直是计算机视觉中非常重要的研究领域之一。目前目标检测有三种经典方法,分别是光流法、背景差分法以及帧间差分法。光流法是利用图像序列中的像素值的时域变化和相关性来确定各自像素位置的运动,即研究图像灰度在时间上的变化与景象中物体结构及其运动的关系。文献[1]中提出了一种改进的光学图像配准方法,可以作为一种很好的光流法初始运动估计。文献[3]提出了一种结合光流法与三帧差分法的运动目标检测算法,该算法简化了光流的计算,然而在实际应用中,由于遮挡性、多光源、透明性和噪声等原因,光流场基本方程的灰度守恒假设条件不能满足,不能求解出正确的光流场;同时大多数的光流计算方法相当复杂,计算量巨大,因此光流法不能满足实时的要求,一般不被应用于对精度和实时性要求比较高的监控系统。背景差分法利用当前图像与背景图像的差分来检测目标运动,其优点在于能在复杂环境下完整地检测出所有运动物体,缺点在于对于背景突变会导致检测失败,且检测结果会受到慢速目标的影响,同时背景的选取和更新会消耗大量时间。文献[4]深入分析研究了背景差分中光照对运动目标检测与跟踪的鲁棒性的影响,并提出了改进方案。文献[5]利用改进的背景差分实现了车辆检测与遮挡分离。这种方法的关键是背景模型建立的方式,目前混合高斯背景建模法的应用最广泛。文献[6]提出了一种自适应调整K-p的混合高斯背景建模和目标检测算法。文献[8]实现了利用背景差分对高速运动多目标视频序列的目标识别。帧间差分法能快速地获得当前运动区域,但对于慢速运动物体检测效果并不理想。文献[9]提出了一种利用帧间差分快速检测当前移动物体的方法。文献[10]与文献[12]则提出同时应用背景差分和帧间差分对运动目标检测。本文针对帧间差分法的这一缺点提出了一种改进算法,即将帧间差分量化后顺序转换为一维特征数组,通过非线性滤波平滑特征,在排除噪声干扰的同时保留有效突变点;另外在视频中指定检测区域,对不同区域的特征数组使用归一化处理与连续数值检测等方法,计算出目标通过检测区域的数量。算法在基于Linux[系统][17]的Hi-3515[15,18-19]平台上得到了实验验证,完成了区域密集人群流量计数系统的实现。实验表明,此算法可显著降低帧间差分的运算量,实现了实时检测,提高了密集人群流量计数的准确率。
1核心算法
1.1 算法流程
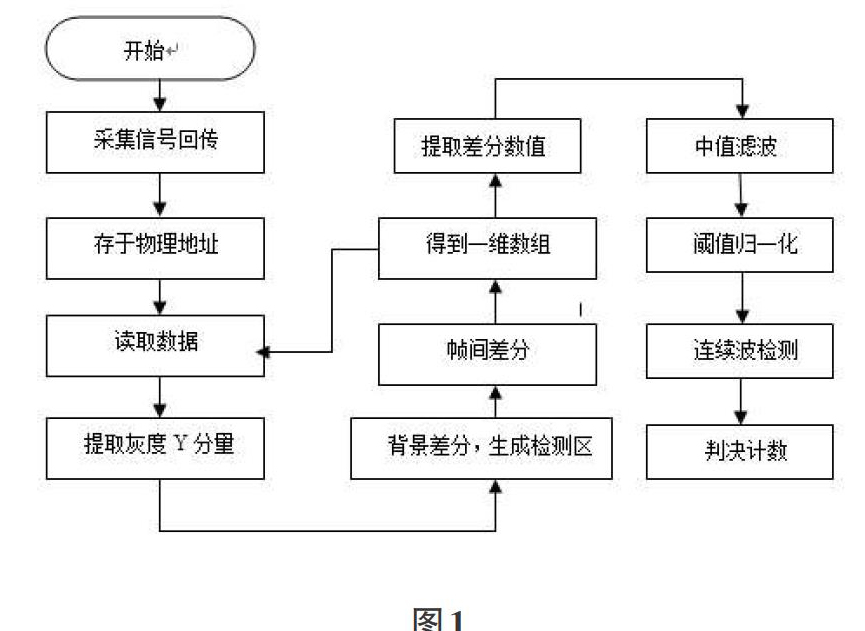
Hi-3515处理器在控制摄像头采集视频的同时,读取物理缓存中的图像数据(YUV格式),提取其中的Y分量进行帧间差分,计算出代表帧间差分的一维特征数组。考虑到视频中只有部分区域存在人流量,只需对感兴趣区域内的数据进行处理,可以大大节约存储空间和处理时间。
数据的后期处理是该程序算法的主体部分,首先对初次处理所得到的一维数组进行中值滤波降噪,去除部分噪声和毛刺,降低噪声干扰;然后,将平滑滤波后的一维数组进行阈值归一化,得到0/1数列,为去除偶然因素对结果的影响,进行二次中值滤波;最后,利用连续波检测进行判决,当判决结果认为有检测物体通过时,计数器增加,最终得到计数结果并显示在显示屏上。
本文提出的算法流程图如图1所示。
2系统搭建
开启电源开关后,Hi-3515开发板,摄像头,显示器将开始工作,此时开发板上的Linux系统启动,系统自检后启动必要的系统进程,该进程已被写入自启动日志中,启动后将自动运行。系统软硬件启动完成后,将会对各个连接的外设进行初始化操作。包括对摄像头的初始化和对显示器的初始化,以及对于控制开关的自检。初始化操作完成之后摄像头开始工作,将采集到的视频信号传回Hi-3515开发板。摄像头为模拟设备,因此传回的数据为模拟信号,在之后处理的过程开始之前,需要进行进制为12Bit的模数转换。Hi-3515开发板具有该功能,可以比较方便地进行该过程。
摄像头采集并且回传的信号将会分为两路,其中一路经过模数转换后生成YUV格式的视频文件,之后进行视频格式编码,并显示在屏幕上。另一路信号则不经过编码,提供给数据处理程序进行处理,如图7所示。
3测试及分析
为了方便测试,更好的分析检测结果,我们模拟了人群通过检测区域的情况,即以人为检测目标,对不同的人群情况进行分析,选择最好的方案。
3.1单人单列通过测试区域
这是最简单最理想的计数情况,只需要选定一个目标区域,进行帧间差分、平滑滤波等数据处理就可以计数且较为准确。
图8中是在这种情况下的相关数据。由数据可以看出从114帧到129帧,274帧到290帧的帧间差分值产生了很大变化,且连续帧数超过阈值T2,所以就能判断为计数加1。
3.2两人并排通过测试区域
3.2.1初始方案
初始方案,我们设计的是两个并行的检测区域:
如果[f1]或者[f2]区域出现帧间差分值过大,即为一个人通过,如果[f1]、[f2]都出现变化,则为两个人并排通过。
但是如果这样划分区域当检测目标从两个区域中间通过时,[f1]、[f2]都会出现变化,可能会将一个人误计为两个人如图10:
3.2.2改进方案
我们改进了这个算法,即将检测区域划分为三个区域,如图11,并依照阈值归一化处理来判决:
当连续的1达到某个时间阈值时则判断为一个人上车,当连续的2达到某个时间阈值时则判断为两个人并排上车。
从49帧到59帧的[f1]、[f12]的帧间差分值判为连续的十个2,从113帧到126帧的[f1]、[f12]帧间差分值也为连续的2,即连续出现1,1,0的情况且超过阈值[T2],所以均判断为两个人。经检测,这个算法包含了第一种情况且更为准确。
3.3测试结果与分析
根据测试方案中可能出现的情况,我们分别做了相关情景的测试,并得到了相关数据。每种情景我们做了10次以上的测试,在这里我们在每种情景中选取了5组数据进行分析。
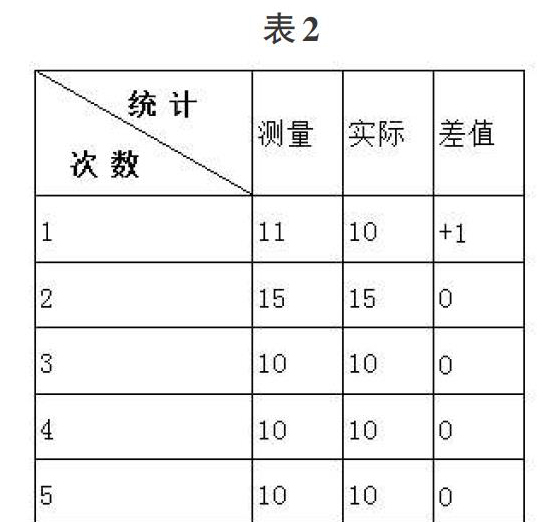
1) 单人单列通过
由表2中的数据我们可以看出,除第一次外,在单人单列通过时,此系统保证了较高的准确度。也就是说在这种情况下,该系统的计数是较为准确的。
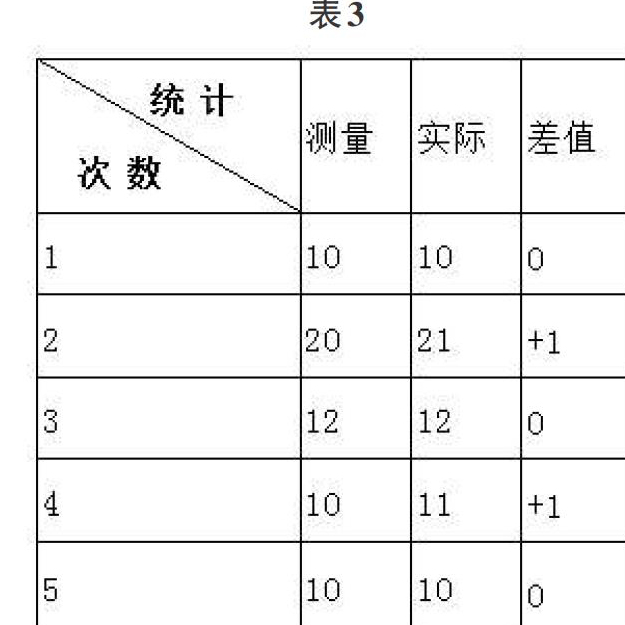
2) 两人并排通过
由表3中的数据我们可以看出,与单人单列通过的情景相比较,两人并排通过的准确度有所降低。但是在考虑误差的基础上,此种情况下,该系统的计数还是较为准确的。
3)多人一列通过(距离较近)
由表4中的数据我们可以看出,多人一列通过的情景与两人并排通过的情景的测试数据相差不大,但这两种情景的准确度都较单人单列通过有偏差。在考虑误差的基础上,此种情况下,该系统的计数还是较为准确的。
4总结
本文所提基于图像帧间差分算法的计数方法,是将二维图像转化为一维数组,再通过中值滤波平滑去噪,对去噪后的数组归一化处理,再应用连续波检测等方法对一维数组进行处理,并将此算法应用于Hi-3515处理器,在此平台上配置相应的硬件及软件制作了一个区域检测计数系统,并进行了模拟实验,对实验数据进行记录和分析,通过测试,对于不同的情况计数结果虽有所偏差,但是在考虑误差的基础之上,计数结果是较为准确的。
参考文献:
[1] XIONG Jing-Yi, LUO Yu-Pin, TANG Guang-Rong. An Improved Optical Flow Method for Image Registration with Large-scale Movements[J].Acta Automatica Sinica, 2008, 34(7):760-764.
[2] 裴巧娜.基于光流法的运动目标检测与跟踪技术[D].北京:北方工业大学,2009.
[3] 袁国武,陈志强,龚健,等.一种结合光流法与三帧差分的运动目标检测算法[J].小型微型计算机系统,2013,34(3):668-671.
[4] 张雨丝.基于背景差分的光照鲁棒性运动目标检测与跟踪技术研究[D].成都:西南交通大学,2011.
[5] 李秦君,党宏社,王明伟. 基于视频的改进背景差分法车辆检测与遮挡分离[J]. 陕西科技大学学报,2011,
[6] 韩明,刘教民,孟军英,等.一种自适应调整K-p的混合高斯背景建模和目标检测算法[J].电子与信息学报,2014,36(8):2023-2027.
[7] 袁國武,智能视频监控中的运动目标检测和跟踪算法研究[D].昆明:云南大学,2012.
[8] ZHANG Wen-Tao, LI Xiao-Feng, LI Zai-Ming. Accurate Detection of High-speed Multi-target Video Sequences Motion Regions Based on Reconstructed Background Difference[J].Journal of Electronics, 2001, 18(1):1-7.
[9] 李亮,罗毅.帧间差分法在视频监控中的应用研究[J].四川理工学院学报:自然科学版,2015,28(6):58-62.
[10] HUANG Zhong-wen, QI Fei-hu, CEN Feng. Background Subtraction and Frame Difference Based Moving Object Detection for Real-Time Surveillance[J].Journal of Donghua University, 2003, 20(1):15-19.
[11] Mohammed Mahfuz Abdelkadir. Research on Detecting Moving objects using Background Subtraction and Frame Difference[D].黑龙江:哈尔滨工程大学,2012.
[12] 屈晶晶,辛云宏. 连续帧间差分与背景差分相融合的运动目标检测方法[J].光子学报,2014,43(7):1-8.
[13] CHEN Jun-chao, ZHANG Jun-hao, LIU Shi-jia, et al. Improved Target Detection Algorithm Based on Background Modeling and Frame Difference [J].Computer Engineering, 2011, 37:171-173.
[14] 邱联奎,刘启亮,赵予龙,李冠杰.混合高斯背景模型目标检测的一种改进算法[J].计算机仿真,2014,31(5).
[15] Hisilicon.海思Hi3515 H. 264编解码处理器用户指南[M].Revision02.深圳:海思公司,2010
[16] Hisilicon.海思Hi3515媒体处理软件开发参考[M].Revision02.深圳:海思公司,2010
[17] 韦东山.嵌入式Linux应用开发完全手册[M].北京:人民邮电出版社,2008:240-360.
[18] 吴光辉.基于Hi3515的视頻传输终端的设计与实现[D].成都:电子科技大学,2012.
[19] 李潺,郭志涛,李伟超,等. 基于Hi3515嵌入式系统的无线车载监控的设计[J].计算机应用与软件,2012,29(9):252-296.
- 学前儿童艺术教育课程模拟教学提问的观察报告
- 钢琴演奏心理的培养方式与意义阐述
- 论音乐边缘学科知识在中职非专业教学中的融合
- 浅析视唱练耳在高校舞蹈教学中的应用
- 高职学前教育专业中美术审美教育的探索
- 新形势下高职院校学生党建工作现状研究
- 基于高中音乐鉴赏课程教学中的审美教育培养分析
- 浅谈创造性音乐教学在高校音乐教学中的运用
- 翻转课堂下高校多维互动式音乐教学的策略分析
- 浅谈中学舞蹈特长生的教学设计
- 研究钢琴教学中元认知理论的作用
- 海洋与气象类节目主持人才培养模式初探
- 现代汉语语音教学中的中国文化
- 自媒体背景下高职传媒专业创业素养培育路径分析
- 试论彝族古典文献《玛牧特依》的教育思想在传统教育中的体现
- 试论二本类高校古筝教学的弊端及其改革之路
- 把握社会需求,探索培养新路
- 古筝专业教学中“读谱法”的应用分析
- 新时期高校现代舞的教学方式探讨
- 浅谈多媒体技术在舞蹈教学中的应用
- 儿童启蒙教育交互绘本对儿童认知的积极影响
- 学前教育专业学生节奏训练的实证研究
- 基于新课改下广西高师院校数学师范生教师技能培养研究
- 中青年美术教师学科素养与专业素质提高策略研究初探
- 高校钢琴教学改革探析
- readorning
- readorns
- read-out
- readout
- read out
- read-out-of
- reads
- read's
- read sb the riot act
- read sth into sth
- read sth out
- read sth through
- read sth ↔ out
- read sth ↔ through/over
- read through/over
- read up on
- read up on sth
- readvertise
- re-advertise
- readvertised
- readvertisement
- re-advertisement
- readvertisements
- readvertises
- readvertising
- 昏酣
- 昏醉
- 昏钝
- 昏错
- 昏镜复明
- 昏镜重光
- 昏镜重明
- 昏镜重磨
- 昏障
- 昏霭
- 昏霾
- 昏霿
- 昏顽
- 昏黄
- 昏黄隐现的星
- 昏黑
- 昏黑一片,看不清楚
- 昏黑的样子
- 昏默
- 昏黝
- 昏黯
- 昏黯黪
- 昒
- 昒昕
- 昒爽