刘畅
摘要:为了对井下环境进行监控,结合无线传感器网络节点定位技术,在RSSI定位方法的基础上,针对特殊的井下巷道环境,提出一种定位精度更高的矿井下定位方法。以RSSI测距的井下隧道模型为基础,利用目标节点附近的信标节点到信标节点的比例差分信息,修正未知节点到信标节点的距离信息,并结合四边定位法进行仿真,结果证明在信标节点能够基本覆盖巷道的情况下能达到很高的定位精度,满足巷道内的定位要求。
关键词:无线传感器网络;巷道;比例差分定位;信标节点
中图分类号:TP393 文献标识码:A 文章编号:1009-3044(2017)06-0044-03
Abstract: In order to monitoring the underground environment ,this paper puts forward a higher-positioning-accuracy algorithm focusing on the special underground circumstance combined with the wireless sensor network nodes positioning technology which is based on the RSSI positioning method. This algorithm corrects the range between unknown nodes and beacon nodes, using the proportion difference range information between the target node and the beacon nodes and simulates with the Three Edge Positioning Rule. The experiments show that high positioning accuracy can be achieved when the nodes cover the least space of the tunnel.
Key words: wireless sensor networks; tunnel; proportion difference positioning; beacon nodes
無线传感器网络广泛地应用于军事、目标跟踪、环境监测以及空间探索等领域。其中,无线传感器网络在矿井下巷道中的应用具有很重要的意义。
在井下的环境监测中,无线传感器网络定位技术是最核心的技术,定位算法的好坏对井下无线传感器网络的效果起到重要的作用。目前,无线传感器网络在定位方面大部分是针对户外开放环境下的,尤其是针对井下巷道的定位的研究比较薄弱。因为在井下巷道的环境中,无线信号的传播受到极大限制,因此,如何能够提高井下巷道环境下的RSSI定位精度是一个具有实用意义的问题。
1 定位现状
定位是无线传感器网络重要的支撑技术,定位就是确定节点或者监测目标的位置。目前,公认的有理论基础的定位主要分为基于测距的定位算法和无需测距的定位算法两个方面。两者的定位思想本质上没有根本性的差别,前者主要是通过测量相邻节点之间的距离来进行定位,主要有到达强度测量法(RSSI)、到达时间测量法(TOA)、到达时间差测量法(TDOA)等方法。基于测距的定位方法一般能在定位中达到相对较高的定位精度,但是会增加算法复杂度和通信开销;基于无需测距的定位算法一般较少,而且定位精度很难达到理想的程度,主要有质心定位算法、APIT定位算法等。
RSSI定位方法是一种算法简单、通信能耗小、容易实现的算法。目前已经有很多的方法出现,文献[1]提出一种井下链式部署信标节点的动态RSSI的定位算法,寻找巷道内的路径衰落指数,用来提高节点对环境的适应能力;文献[2]提出了对角差分的方法来校正测量到的RSSI距离,改善定位精度;文献[3]利用了一种基于RSSI测距的切球球心法,来对节点进行定位;中国科学院的方震、赵湛[4]等阐述了RSSI的测距原理进,进一步通过大量的实验分析了衰减模型,确定影响模型的因素。Savvides、Park[5]等将卡尔曼滤波滤波应用到分布式网络节点定位求精中,金仁成、赵伟[6]等在上文基础上通过仿真实验,从收敛效果和相对误差两方面比较了两种采用不同模型的测量方程定位效果,结果表明以 RSSI 值量作为观测量能有效地抑制测距误差。陈维克,李文锋[7]等提出了利用移动信标节点定位的方法,移动的信标节点周期性发送信号相当于增加了信标节点的数量,利用信号较好的若干信标节点使用最小二乘法估计静态目标的位置,不过这种方法在实际的应用中很难实现。
2 算法设计
2.1 RSSI的使用模型
由于井下的巷道是一种封闭的环境,并且墙壁粗糙,无线电信号在巷道内的传播无可避免会受到巷道反射、散射、多径效应。经典的RSSI损耗模型为
式中,P0(d0)为参考距离d0处的信号强度,一般d0的取值为
h1和h2分别为发射机和接收机的天线长度,λ表示无线电波的波长。n为衰减因子;Xσ表示遮蔽因子服从方差为σ的正态分布,将其确定为噪声模型,能提高测距的准确性。由于井下的特殊环境,可以用高斯滤波的方法对噪声部分进行滤除,代入损耗模型求得距离。
如图1所示,根据菲涅尔区域[8]理论,电磁波在隧道中传播时,由于巷道内的反射、散射以及多径效应,可将隧道分为近区和远区两个传播区域,在近区主要是多模传播,而在远区,传播的方式主要是稳定的引导传播,两个区域的分界点可以通过理论来确定。隧道中两种电磁波传播区域的分界线为发射天线到转折点的最大距离,即
其中,h为隧道的高度,w为隧道的宽度,λ为电磁波的波长。由此可见dNF值和巷道的宽和高的平方成正比。由于国家对于井下巷道的要求规范,巷道的高度不得低于1.8米,宽度不得低于1.2米,以此为标准来计算,对应于900MHz和2GHz的边界分别为9.24米和20.16米,由于无线传感器网络节点的特性,节点之间的电磁波传播方式主要是多模传播,与波在自由空间传播的模型类似。因此,可以用自由空间传播模型来计算损耗。
2.2 比例差分法对RSSI距离优化
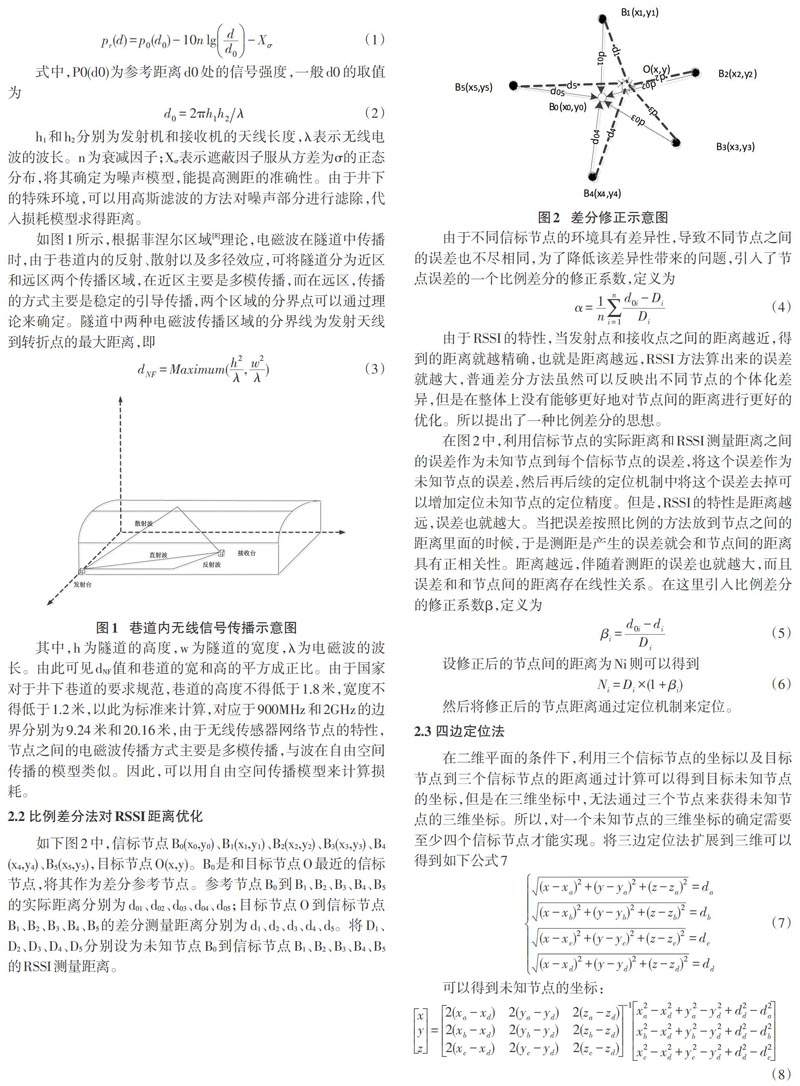
如下图2中,信标节点B0(x0,y0)、B1(x1,y1)、B2(x2,y2)、B3(x3,y3)、B4(x4,y4)、B5(x5,y5),目标节点O(x,y)。B0是和目标节点O最近的信标节点,将其作为差分参考节点。参考节点B0到B1、B2、B3、B4、B5的实际距离分别为d01、d02、d03、d04、d05;目标节点O到信标节点B1、B2、B3、B4、B5的差分测量距离分别为d1、d2、d3、d4、d5。将D1、D2、D3、D4、D5分别设为未知节点B0到信标节点B1、B2、B3、B4、B5的RSSI测量距离。
由于不同信标节点的环境具有差异性,导致不同节点之间的误差也不尽相同,为了降低该差异性带来的问题,引入了节点误差的一个比例差分的修正系数,定义为
由于RSSI的特性,当发射点和接收点之间的距离越近,得到的距离就越精确,也就是距离越远,RSSI方法算出来的误差就越大,普通差分方法虽然可以反映出不同节点的个体化差异,但是在整体上没有能够更好地对节点间的距离进行更好的优化。所以提出了一种比例差分的思想。
在图2中,利用信标节点的实际距离和RSSI测量距离之间的误差作为未知节点到每个信标节点的误差,将这个误差作为未知节点的误差,然后再后续的定位机制中将这个误差去掉可以增加定位未知节点的定位精度。但是,RSSI的特性是距离越远,误差也就越大。当把误差按照比例的方法放到节点之间的距离里面的时候,于是测距是产生的误差就会和节点间的距离具有正相关性。距离越远,伴随着测距的误差也就越大,而且误差和和节点间的距离存在线性关系。在这里引入比例差分的修正系数β,定义为
设修正后的节点间的距离为Ni则可以得到
然后将修正后的节点距离通过定位机制来定位。
2.3 四边定位法
在二维平面的条件下,利用三个信标节点的坐标以及目标节点到三个信标节点的距离通过计算可以得到目标未知节点的坐标,但是在三维坐标中,无法通过三个节点来获得未知节点的三维坐标。所以,对一个未知节点的三维坐标的确定需要至少四个信标节点才能实现。将三边定位法扩展到三维可以得到如下公式7
可以得到未知节点的坐标:
2.4 MATLAB仿真
在这里采用MATLAB对比例差分修正的RSSI算法进行仿真。MATLAB由mathworks公司开发,提供了一个可视化和交互式的计算环境。由于其功能强大,编程简单,语言兼容性强的特点,在對系统的建模和仿真方面有广泛的应用。
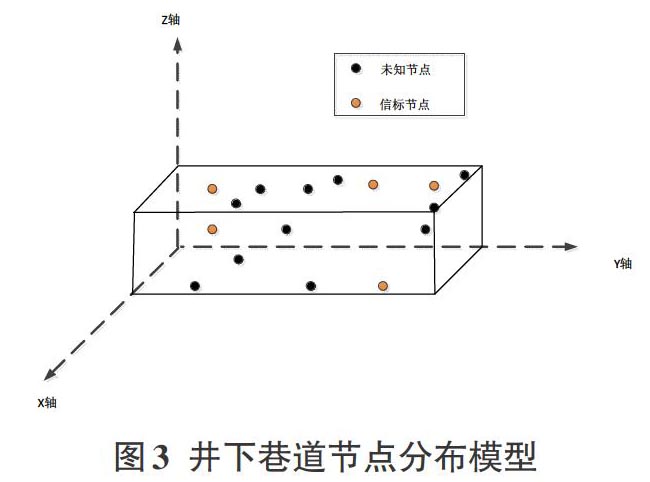
由于基于RSSI的比例差分修正算法中存在复杂的运算,需要对大量的数据进行处理,因此选择MATLAB能够对算法的仿真提供一个好的环境。首先,模拟井下巷道的环境构建一个100米长,15米宽,15米高的巷道模型如图3所示。
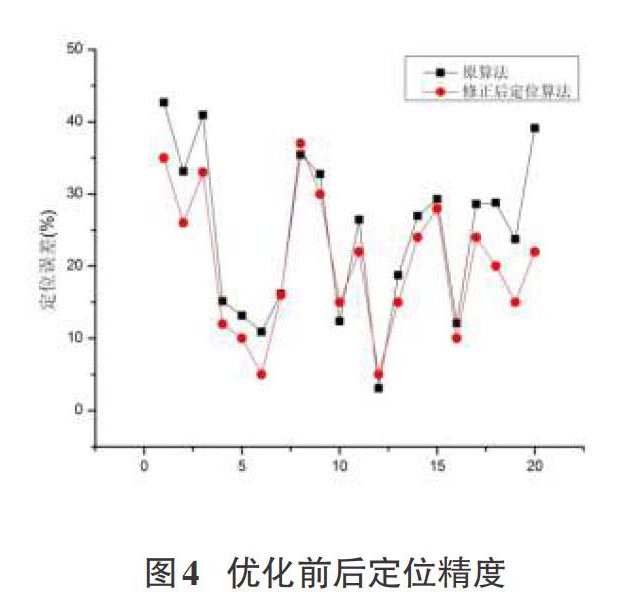
传统的RSSI定位算法,在经下巷道的环境中,利用四边测量法计算未知节点的坐标,由于多径效应、巷道内的环境等因素,导致四边测量定位产生很大的偏差。如图4所示,在仿真中选取10个未知节点来反映定位精度。由于仅仅采用传统RSSI方法进行定位,且信标节点的分布使四边测量的数据偏差严重,得到的定位精度自然很低;经过优化的RSSI定位算法增强了三边的测量精度,同时滤出了噪声,可以得到相对较好的定位精度;但是,由于未知节点是随机选取的,很有可能在巷道的边缘地带,距离信标节点比较远,定位的精度就会有差异,导致采样的定位精度的方差比较大。此外,如图5所示,修正后的RSSI定位精度和信标节点的数量大约成正比例。当只有三个信标节点的时候,修正后的定位精度甚至比原始RSSI定位精度要低,主要由于巷道的环境中未知节点的分布很可能距离至少一个信标节点比较远,距离的误差对三边定位的影响非常大。当信标节点数量到8个的时候,未知节点的定位精度并没有继续随着信标节点数量的增加继续上升,甚至略有下降,逐渐趋于平缓的状态。也就是当信标节点到达8个左右的时候,未知节点定位需要的信标节点的数量趋于饱和,已经基本上完全覆盖巷道的环境。继续增加信标节点的密度不会使未知节点的定位精度进一步提高。
3 总结
在井下特殊的环境中,利用优化的RSSI定位算法对井下节点进行定位需要对RSSI模型选择和判断。同时,利用比例差分的方法可以对RSSI测距进行优化,减小未知节点和信标节点之间的距离误差,进一步提高了未知节点的坐标精度。但是,在一定程度上会增加算法的复杂度,增加无线传感器网络的系统开销。此外,四边定位的方法会带来很大的计算量,下一步寻找一个更加有效简便的定位方法,会使节点的定位精度进一步提升。
参考文献:
[1] 乔钢柱,曾建潮. 信标节点链式部署的井下无线传感器网络定位算法[J].煤炭学报,2010,35(7):1229-1233.
[2] 田丰,秦涛, 刘华艳,等.煤矿井下线型无线传感器网络节点定位算法[J].煤炭学报,2010,35(10):1760-1764.
[3] 张共会,邓志东.基于无线传感器网络的地下矿工定位算法[J].计算机测量与控制,2008,16(12):2003-2005.
[4] 方震,赵湛,郭鹏,等.基于RSSI 测距分析[J].传感技术学报,2007, 20(11): 2526-2530.
[5] Savvides A, Park H, Srivastava M B. The bits and flops of the n-hop multilateration primitive for node localization problems[C]// Proceedings of the 1st ACM international workshop on Wireless sensor networks and applications. New York, NY, USA: ACM, 2002: 112-121.
[6] 金仁成,赵伟,石小培. 基于EKF算法的无线传感器网络定位技术研究[J].传感技术学报, 2010,23(12): 1810-1814.
[7] 陈维克,李文锋,首珩,等.基于卡尔曼滤波的 WSNs节点定位研究[J].武汉理工大学学报,2007,29(8): 112-116.
[8] 闻映红. 电波传播理论[M].北京:机械工业出版社, 2013.
- 高中物理教学中问题情境的创设研究
- 基于初中化学情境创设的深度复习策略
- 运用习题拓展学生想象、培养学生思维创造能力
- 县域红色历史资源与教学模式的多样化选择
- 大数据环境下初中信息技术教学策略设计
- 神奇物理,高一学生你敢来“撩”吗?
- 初中篮球运动体能训练对策
- 文字史料在高中历史教学中的择取与问题设计
- 高中生物曲线图形习题解答浅谈
- 解析高中化学中的离子共存问题
- 浅析小学数学课外作业的布置
- 分析高中有机化学中烃衍生物的复习方法
- 新课程背景下高三历史复习的有效性
- 从数学复习课中浅探素质教育
- 初中数学教学中学生反思能力的培养
- 趣味化学实验在初中化学教学中的应用研究
- 初中数学教学中逆向思维能力的培养
- 微课在高中物理教学中应用的可行性分析
- 运用云平台开展初中数学课堂教学
- 培养问题意识,提高综合素质
- 探究初中数学有效性教学方法
- 浅谈小学课堂中“参与式教学”运用
- “经典”到“通俗”
- 情境教学法在初中思想品德课中的运用
- 助力学生顺利过渡
- blind test
- blindtrial
- blind trial
- blindworm
- blind²
- blind³
- blind¹
- blink
- blinked
- blinker
- blinkered
- blinkering
- blinkers
- blinks
- blink²
- blink¹
- blip
- blipped
- blipping
- blips
- bliss
- blissed
- blisses
- blissful
- blissfully
- 陷坠
- 陷城
- 陷失
- 陷害
- 陷害人
- 陷害人的圈套
- 陷害人的阴谋诡计
- 陷害他人的手段
- 陷害凌侮
- 陷害好人
- 陷害怨恨
- 陷害毁谤
- 陷害的方式
- 陷害诈骗
- 陷害诛灭
- 陷将
- 陷怼
- 陷扃
- 陷挠
- 陷敌摧锋
- 陷文
- 陷机
- 陷构
- 陷正
- 陷殁