罗丹 李丹 殷理杰
摘要:移动机器人的应用越来越广泛,传统规划算法已不能满足需求,因此智能算法被应用到路径规划中。首先,阐述了智能算法的相关信息和数据;其次,阐述了遗传算法、蚁群算法三种典型智能优化算法的基本思想以及其在机器人路径规划问题中的最新研究成果;最后并对未来智能优化算法在机器人路径规划方面的研究进行了总结与展望。
关键词:智能优化算法;路径规划;机器人;混合算法
中图分类号:TP242? ? ?文獻标识码:A
文章编号:1009-3044(2020)26-0180-02
1引言
随着人工智能的发展,移动机器人被广泛应用于军事用途、智能交通等诸多领域。路径规划是在环境空间中,根据某一优化目标规划出一条最优无碰撞路径[1]。因此,国内外学者对路径规划做了诸多研究,常用传统路径规划算法有可视图法、栅格法、自由空间法。而随着生活的智能化程度以及对机器人应用领域的增多,当工作空间的环境较为复杂时,传统算法的搜索效率低下,会存在一些搜索的缺陷。自由空间法随着障碍物数量的增加,计算的复杂度随之增加,寻优能力变差。可视图法的搜索效率很低且无法满足路径规划的实时性要求。
随着人工智能优化算法的不断提出,近年来,学者们将遗传算法、蚁群算法、人工免疫算法等进化算法和群智能优化算法应用到机器人路径规划中,并针对局部搜索和全局搜索提出多种改进机制,提高算法的寻优性能。通过查阅将近五年来发表在EI和SCI期刊上的关于机器人路径规划研究相关文献,发现遗传算法、蚁群算法、粒子群算法在机器人路径规划研究的论文数量居前,选取遗传算法、蚁群算法、粒子群算法三种典型智能算法,对各个智能优化算法的基本思想以及其在机器人路径规划问题中的近期研究成果进行了阐述;并对未来智能优化算法在机器人路径规划方面的研究进行了总结与展望。
2基于遗传算法的机器人路径规划
2.1遗传算法的基本思想
遗传算法是 Holland提出的,并进行了大量研究和推广。遗传算法的提出是以生物进化论为基础,通过模拟自然界遗传机制和生物进化论而形成的一种过程搜索最优解的算法。核心操作就是选择、交叉、变异,从而使问题一步步接近最优解。遗传算法以其具有并行搜索、简单通用、鲁棒性强等优点,由于遗传算法提出较早,被广泛地应用到各类问题中。
2.2遗传算法在机器人路径规划上的应用
候仰强等人[2]研究双机器人协调焊接复杂空间焊缝路径规划问题中,提出一种多目标遗传算法,以焊接质量函数、机器人运动平稳性函数以及双机器人碰撞函数三个为评价函数为优化目标,以“马鞍形”空间焊缝为例进行了仿真验证,结果表明研究方法是可行的。Milad等人[10]将多目标遗传算法改进之后用到多个机器人路径规划问题上,以四机器人路径规划为例,仿真结果表明,能为所有机器人找到接近最优的解决方案。李等人[3]提出几点关于遗传算法在机器人路径上的研究展望:可将遗传算法与多种智能算法相结合,取长补短,解决更多的难题;多机器人协调工作机制是未来研究重点。
3 基于蚁群算法的机器人路径规划
3.1蚁群算法的基本思想
蚁群算法是1992年Marco Dorigo在他的博士论文中提出,其基本思想是源于蚂蚁在寻找食物过程中通过释放信息素,利用信息素浓度的大小,经过一段时间后,最终找到一条最短的路径。蚁群算法初期主要用求解旅行商路径规划问题,但也存在收敛速度慢等不足。多年来各国学者提出了诸多改进,以提高其算法的收敛性,并陆续应用到大规模集成电路设计、车辆调度问题、机器人协作问题求解等领域。
3.2 蚁群算法在机器人路径规划上的应用
蚁群算法是一种较早提出的启发式优化算法,在机器人路径规划领域得到了广泛的应用,也获得了较多的研究成果, Chen等人[4]提出了一种快速两阶段蚁群算法优化机器人路径规划问题。基本思想是将启发式搜索分为两个阶段:预处理阶段和路径规划阶段,克服了基本蚁群算法本身的不足,通过与其他算法相比表明,该算法具有良好的性能和收敛速度。Zeng等人[5]对蚁群算法进行改进,提出一种自由步长的蚁群算法。仿真结果表明,与传统的蚁群算法相比,自由步长蚁群算法能够找到更短的路径,收敛性更好。张玮等人[6]提出改进烟花-蚁群混合算法求解最优路径,将改进烟花算法获得的最短路径替换蚁群算法中的初始信息素分布,从而使蚁群算法在收敛速度上获得提高。
4 粒子群算法
4.1遗传算法的基本思想
粒子群算法(Particle Swarm Optimization,PSO)的思想是源于鸟类觅食,当鸟类在飞向目标食物时,会在速度的大小和方向上不断模仿鸟群中优秀个体。基本粒子群算法的位置和速度更新公式为:
[vij(t+1)=wvij(t)+c1rand(0,1)[pbestij(t)-xij(t)]+c2rand(0,1)[gbestj(t)-xij(t)]xij(t+1)=xij(t)+vij(t+1)]
其中,用[xij]表示粒子i在第j维空间的位置,用[vij]表示粒子i在第j维空间的速度,[pbestij]表示粒子i在第j维空间的局部最优位置,[gbesti]表示粒子i在群体中全局最优位置,rand(0,1)表示[0,1]之间的随机数,[c1]和[c2]是常数(表示学习因子),[w]表示惯性权重。
粒子群算法简单容易操作,收敛速度快等优点,被广泛应用于系统识别,神经网络训练,组合优化问题,多目标约束优化等领域。
4.2粒子群算法在机器人路径规划上的应用
陈等人[7]利用了一种 ES-PSO算法,以解决机器人平滑路径规划问题;通过仿真结果表明,该算法够快速准确地寻找到机器人的平滑最优路径。Das等人[8]结合遗传算法和蜂群算法中的进化算子对粒子群算法改进提出,通过与DE和IPSO的比较,验证了该算法的鲁棒性和有效性。Fatin等人[9]提出了一种融合局部搜索算法和障碍物检测与避障策略的混合PSOMFB算法。对该算法在不同环境下进行了测试,仿真结果表明,该方法在复杂动态环境下也能生成最优可行路径。
5寻优性能比较
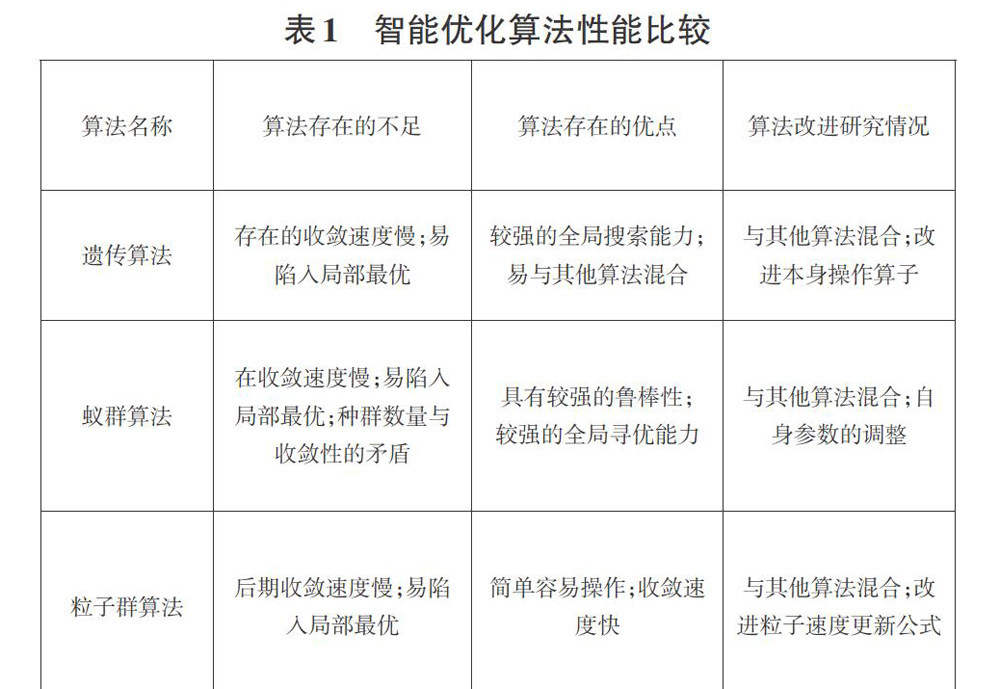
综上所述三种智能优化算法在求解机器人路径规划问题时基本算法都存在各自的不足,学者们都在基本算法的基础上进行了改进研究,现对3种智能优化算法进行性能比较如下。
[算法名称 算法存在的不足 算法存在的优点 算法改进研究情况 遗传算法 存在的收敛速度慢;易陷入局部最优 较强的全局搜索能力;易與其他算法混合 与其他算法混合;改进本身操作算子 蚁群算法 在收敛速度慢;易陷入局部最优;种群数量与收敛性的矛盾 具有较强的鲁棒性;
较强的全局寻优能力 与其他算法混合;自身参数的调整 粒子群算法 后期收敛速度慢;易陷入局部最优 简单容易操作;收敛速度快 与其他算法混合;改进粒子速度更新公式 ]
6结论与展望
本文从机器人路径规划的智能优化方法中,综合研究数据和智能优化算法分类,对遗传算法、蚁群算法、粒子群算法在机器人路径规划上的研究成果进行了论述。根据国内外近五年研究现状,总结机器人路径规划问题的研究会集中在以下几个方面。
1)与其他优化算法混合。智能算法自身都会存在的有一定的不足。当前研究者们已经在不断地发掘不同的混合算法来解决实际路径规划问题,这一研究方向将会更加受到关注。
2)机器人之间的协同路径规划。现在的大部分工作环境都是多台机器人同时工作,因此完成多台机器人之间的协作,并获得最优规划路径也将是一个热点和难点。
3)高维复杂环境下的路径优化应用。在目前的移动机器人路径规划优化,考虑二维空间的环境情况较多。而实际许多机器人的工作环境是更加复杂的,如三维工作环境、变化的环境等,学者们针对这类高维复杂的机器人路径规划研究较少,这是路径规划问题中的一个难点,同时也是以后的研究重点。
参考文献:
[1] 杜永, 郑万群, 刘增环. 关于移动机器人运动路径规划仿真研究[J]. 计算机仿真, 2019, 36(1):331-335.
[2] 侯仰强, 王天琪, 岳建锋,等. 基于多目标遗传算法的双机器人协调焊接路径规划[J]. 中国机械工程, 2018, 29(16):98-103.
[3] 李少波,宋启松,李志昂,等.遗传算法在机器人路径规划中的研究综述[J].科学技术与工程,2020,20(2):423-431.
[4] Chen X,Kong Y Y,Fang X,et al.A fast two-stage ACO algorithm for robotic path planning[J].Neural Computing and Applications, 2013,22(2):313-319.
[5] Zeng MR,Xi L,XiaoAM.The free step length ant colony algorithm in mobile robot path planning[J].Advanced Robotics, 2016,30(23):1509-1514.
[6] 张玮, 马焱, 赵捍东,等. 基于改进烟花-蚁群混合算法的智能移动体避障路径规划[J]. 控制与决策, 2019, 34(2):114-122.
[7] 陈嘉林, 魏国亮, 田昕. 改进粒子群算法的移动机器人平滑路径规划[J]. 小型微型计算机系统, 2019, 40(12).2550-2555.
[8]? Applied Soft Computing. Multi-robot path planning using improved particle swarm optimization algorithm through novel evolutionary operators [J/OL].http://www.sciencedirect.com/science/article/pii/S1568494620302520.27 April 2020
[9] AjeilFH,IbraheemIK,SahibM A,etal.Multi-objective path planning of an autonomous mobile robot using hybrid PSO-MFB optimization algorithm[J].Applied Soft Computing,2020,89:106076.
[10] NazarahariM,KhanmirzaE,DoostieS.Multi-objective multi-robot path planning in continuous environment using an enhanced genetic algorithm[J].Expert Systems With Applications, 2019,115:106-120.
【通联编辑:梁书】
- 高中政治教学中学生学习能力的评价研究
- 试析高中语文诗歌语言教学中的美育
- 探究初中数学创新思维能力的培养
- 如何提高农村初中学生语文自主学习的能力
- 把脉通络,对“症”开“方”
- 新时期初中班主任德育工作面临的挑战与对策研究
- 数字化在中学教学管理方面的应用研究
- 浅谈主题班会与班级管理
- 高中地理教学中探究式教学的应用探析
- 慕课在高中思政课运用中的基本原则探究
- 中职汽车维修专业“一体化”教学探讨
- 基于新课程背景下创新高中体育教学模式的方法初探
- 互助式教学在初中数学二次函数教学中的应用探索
- 翻转课堂在高中生物教学中的应用研究
- 利用典型模型提升核心素养
- 初中英语任务型教学的思考
- 刍议初中数学教学应用探索
- 如何构建高中数学生成性课堂
- 案例教学法在高中地理教学中的应用
- 扶优补差,践行分层教学
- 如何在参与式教学模式下提高初中数学课堂有效性
- 提高初中英语教学有效性的实践分析
- 如何构建初中英语词汇教学的高效课堂
- 小学数学教学中创设有效问题情境的策略分析
- 新课改下初中化学的有效教学方法
- small-timer
- small-timers
- small-town
- small town
- small-towner
- small-towners
- small²
- small¹
- smarmier
- smarmiest
- smarmily
- smarminess
- smarminesses
- smarmy
- smart
- smart alec
- smart aleck
- smart-aleckry
- smart alecs
- smart-arse
- smart-ass
- smart-ass/wise guy
- smart card
- smartcard
- smart cards
- 大内
- 大写
- 大军
- 大军之后,必有凶年
- 大军出发
- 大军压境
- 大军未到,粮草先行
- 大军未动,粮草先行
- 大军未发,粮草先行
- 大农业
- 大冠子夏
- 大冥
- 大冬
- 大冬会
- 大冬天的
- 大冯君
- 大冰
- 大冷天卖凉鞋——别无分店
- 大净
- 大减
- 大几何学家
- 大凡
- 大凡大略
- 大凡小事
- 大凡快意处,即是受病处