康燕仁
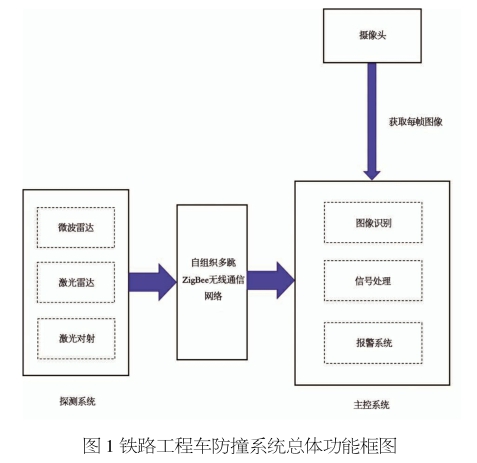
本文设计并研发了一种基于雷达测距的铁路工程车防撞系统,该系统主要由微波测距雷达、激光测距雷达、激光对射模块、摄像头和主控组成,微波雷达、激光雷达和激光对射将周围获取的信息传给单片机,再通过ZigBee无线通信网络传输给主控,主控将接收的数据进行信息融合并与设定的门限值做比较,从而形成报警。同时主控根据前方路况画面进行预测,通过摄像头获取实时图像,导入深度学习模型进行目标识别。
近年来,随着轨道交通建设规划的实施,轨道交通、客运专线建设正在高速发展,已成为城市居民便捷出行的主要交通工具。为了实现更快的人员来往、物资运输,列车运行速度在不断提高,同时为了保障列车运行的安全,對轨道车辆及运营设备的要求也越来越高。如何保障列车安全运营成为轨道交通最为重要和最受关注的话题。
铁路检修工程车作为铁路安全防护与检修中的重要一环,扮演着至关重要的角色,其主要应用于牵引检修、运输检修、轨道检修和轨道维护等方面。考虑到运营的特殊性和经济性,铁路工程车并没有安装列车运行自动防护系统(ATP)或其他列控系统,其安全防护主要依靠人眼识别判断,因此在防护力度、安全性、操作性及反应灵敏度等方面存在一定的缺陷,例如:
①铁路工程车运行在还未完成的铁路上,或多个不同作业的工程车同时工作时,由于没有任何检测装置和报警系统,工程车司机一旦疏忽,很可能导致相撞。
②当前方出现其他物体时,需要迅速判断该减速、停止还是继续工作。司机受施工作业压力、任务繁重等因素影响,可能会出现处理速度慢,甚至错误处理等危险行为。
因此需要研究制造一套与信号系统完全独立且能全天时、全天候自主工作的工程车行车安全保障系统。
系统功能
1.探测功能
主要对微波测距雷达、激光测距雷达、激光对射模块,进行数据采集,数据通过单片机发送到ZigBee再经过ZigBee无线通信系统传输到主控系统。其中微波雷达对工程车的左、上、右3个方向进行检测,探测距离≥8 m,属于进程防护;激光雷达对工程车的前方和后方进行检测,探测距离≥800 m,属于远程防护;激光对射模块,检测工程车自身的高度和宽度,以免造成剐蹭或意外事故。
2.分类识别功能
工程车的前方路况画面通过摄像头进行实时捕获,同时传给主控,主控通过深度学习模型进行识别、预测和分类。
3.信息融合功能
主控对获取的多组雷达数据和分类的结果进行处理,并与设置的门限值做比较,根据系统设置的报警条件进行语音报警。同时设置传感器自检功能,系统每隔5 s发一个信号脉冲,一旦在超过10 s仍接不到脉冲时系统立即报警,大大提高了系统的可靠性。铁路工程车防撞系统总体功如图1所示。
系统硬件模块
1.微波雷达测距
本系统微波雷达采用的是基于调频连续波(FMCW)的测距雷达,FMCW雷达与脉冲雷达相比具有较大的带宽,因此具有较高的距离分辨力。微波雷达测距模块如图2所示。且具有超大的时带积,远大于相同信号带宽和电平的脉冲雷达,所以在相同检测能力条件下,FMCW雷达发射功率低,不易被截获。
相比于激光雷达,微波雷达的抗干扰能力更强,可以在雨雪、雾霾及沙尘暴等恶劣天气下正常工作,在糟糕环境下微波雷达的穿透性更胜一筹。
2.激光雷达测距
相比于微波雷达,激光雷达具有探测范围较广(本系统激光雷达最高可测得1 000 m)、探测精度高和稳定性强等优点。其工作原理与微波雷达基本类似,只是激光雷达发射的电磁波是一条直线,主要以光粒子发射为主要方法。
3.激光对射探测
激光对射属于主动式入侵探测器,由激光发射机和激光接收机两部分构成。
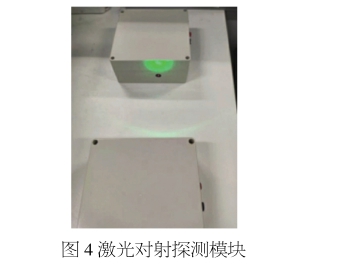
在激光发射机和激光接收机之间形成调制后的一条或者多条激光光束,当激光接收机可靠接收到激光发射机发出的调制信号时,激光接收机判定激光入侵探测器工作正常,就会维持当前的输出信号不变。当激光接收机接收不到激光发射机的调制信号时(激光发射机和激光接收机之间有物体阻断激光射线或者激光发射机出现故障),激光接收机就会判定激光入侵探测器工作不正常,激光接收机就会输出变化的报警信号给后端相连接的报警控制器或者相关联动设备,产生相应的报警信息。
4. ZigBee无线通信
有线通信的布线繁琐复杂,因此本系统采用无线通信网络代替有线通信进行信息传输,无线传输技术主要有WiFi、NFC、ZigBee以及蓝牙等。采用ZigBee是因其具有近距离、低复杂度、低功耗、低数据率及低成本等特点。
系统软件功能模块
1.数据信息采集
微波雷达、激光雷达和激光对射3个模块将获取的信息传递给单片机,单片机通过ZigBee无线通信网络传输给主控。
2.图像分类识别
本系统需要对前面路况进行实时识别,判断前方是直行还是转弯,判断前方是否出现人、畜和其他工程车。采用的图像识别模型是基于Keras的CNN深度学习的AlexNet模型。先在测试集上进行训练,并将各层权重进行保存。之后通过Python调用摄像头,并每隔数帧读取图片,并通过上述模型进行预测,预测结果保存在文档,实时更新,供QT Creator调用。
3.主控数据处理
主控通过ZigBee的协调器节点获取各个终端节点的数据信息,与自己设定的门限值比较,根据报警条件产生相应的报警,并将报警信息显示在屏幕上,同时将前方路况预测的信息显示在屏幕上。此外,还设置信号通道自检功能,在一段时间内检测不到相应ZigBee的数据就会产生报警,由于该危险系数较高,因此将直接中断总串口的读取。
结果数据分析
模型数据显示,微波雷达读取速率≥10 Hz,测距精度≤0.1 m,探测距离≥10 m,且数据正确率达到98 %以上。激光雷达读取速率≥2 Hz,测距精度≤1 m,探测距离≥800 m,数据正确率达90 %以上。激光对射模块至少可在10 m距离实现感应,数据正确率达到99%以上。前方路况识别率全部80%以上。

本项目通过对所研究系统的关键技术,进行了讨论、验证和测试,搭建了样机模型。随着现代化交通设施的发展,铁路工程车作为保障铁路安全性能最重要的一环,对其行驶时的安全防护与周围环境的检测不容忽视。基于此,本项目基于雷达测距的铁路工程车防撞系统将具有极大的参考和应用价值。
- 细节化下的医院图书馆服务探究
- 世界预警机军贸市场探析
- 插画艺术在动漫设计中的应用研究
- 机械硬盘与固态硬盘的介绍与市场情况
- 公安业务案件管理系统的实践与应用
- 基于“互联网+”和大数据分析的社区老人智能医疗服务系统
- 图像处理中几个关键算法的分析
- 计算机技术在医疗系统中的应用
- 安防监控在智能建筑中的应用
- 我国传统元素在动漫设计中的应用
- 电磁悬浮技术调研
- 基于径向基神经网络的非线性系统辨识
- 基于Kinect深度信息的指尖检测及手势识别
- 游戏设计过程中的交互设计技巧策略探究
- 位置指纹库建立的研究
- 基于嵌入式系统的人脸识别技术研究及实现
- 浅析用于监控智能报警系统的图像识别技术
- 县级供电企业绩效考核系统的应用开发与实施研究
- 电力高压试验中变压器控制技术的应用
- 大数据背景的医院数据信息管理平台创建
- 基于数字签名的自助集成打印体统实现
- 21世纪空中预警机的发现趋势研究
- 浅谈5G移动通信的网络构架与关键技术
- 浅谈光传输设备故障分析及维护
- 移动通信数据承载网建设的发展情况研究
- anti-democratical
- antidemocratical
- antidemocratically
- anti-democrat's
- antidemocrats
- anti-depressant
- antidepressant
- anti-depressants
- antidepressants
- anti-depression
- antidepression
- antidepressions
- anti-depressive
- antidepressives
- antidesegregation
- antidesertification
- antidesiccant
- antidevelopment
- anti-diabetic
- antidiarrheals
- antidiarrhoeal
- antidilution
- antidilutive
- anti-dilutive
- antidiscrimination
- 住宅
- 住宅储蓄
- 住宅区
- 住宅消费
- 住宅的围墙
- 住宅的大门
- 住宅附近
- 住客店
- 住室
- 住室南面的书房
- 住家
- 住家主儿
- 住家儿
- 住家接近的人或人家
- 住宿
- 住宿之处
- 住宿休息
- 住宿停留
- 住宿地
- 住宿费
- 住寺
- 住局
- 住居
- 住屋
- 住山边,烧好柴; 住海边,吃活蟹