摘 要: 阀门定位器是工业管道控制系统的关键仪表之一。为了提高定位器的控制性能,以AVR单片机为核心设计基于HART通信协议的智能阀门定位器。介绍智能阀门定位器的组成和工作原理,分析系统设计中的几个关键问题。对于低功耗设计、阀位控制算法、抗干扰及可靠性设计等关键技术提出了可行的实现方案,在实际应用中取得了很好的效果。所论述的关键技术及实现方法对相关产品的研制有重要的指导意义。
关键词: 智能阀门定位器; 低功耗; 阀位控制算法; 抗干扰
中图分类号: TN919?34; TH863 文献标识码: A 文章编号: 1004?373X(2015)08?0139?03
Research and realization of key technology for intelligent valve positioner
WU Ning?sheng
(Zhejiang Vocational College of Commerce, Hangzhou 310053, China)
Abstract: Valve positioner is one of the key instruments in industrial pipeline control system. In order to enhance its control performance, a valve positioner based on HART protocol with AVR microcontroller as the core was designed. Structure and working principle of the intelligent valve positioner are introduced. Several key points such as low?power consumption design, valve position control algorithms, design of anti?interference and reliability design are analyzed. Some effective methods are presented to solve them. Good results has been gained in practical application of the system. The research is of significance to develop the related products.
Keywords: intelligent valve positioner; low power consumption; valve position control algorithm; anti?interference
阀门定位器是气动调节阀的核心配套仪表,实现阀门开度控制,在石化、轻纺、冶金等工业管道系统应用日益广泛。传统的阀门定位器是基于机械力平衡或者电磁转换的仪表,存在着精度低、难调试和控制不灵活等诸多缺点。以微处理器技术为基础的智能阀门定位器能克服上述缺点,正逐步取代传统阀门定位器。本文结合基于HART通信协议的智能阀门定位器开发和设计,探讨几个关键技术难点及其实现方法。
1 智能阀门定位器的组成和工作原理
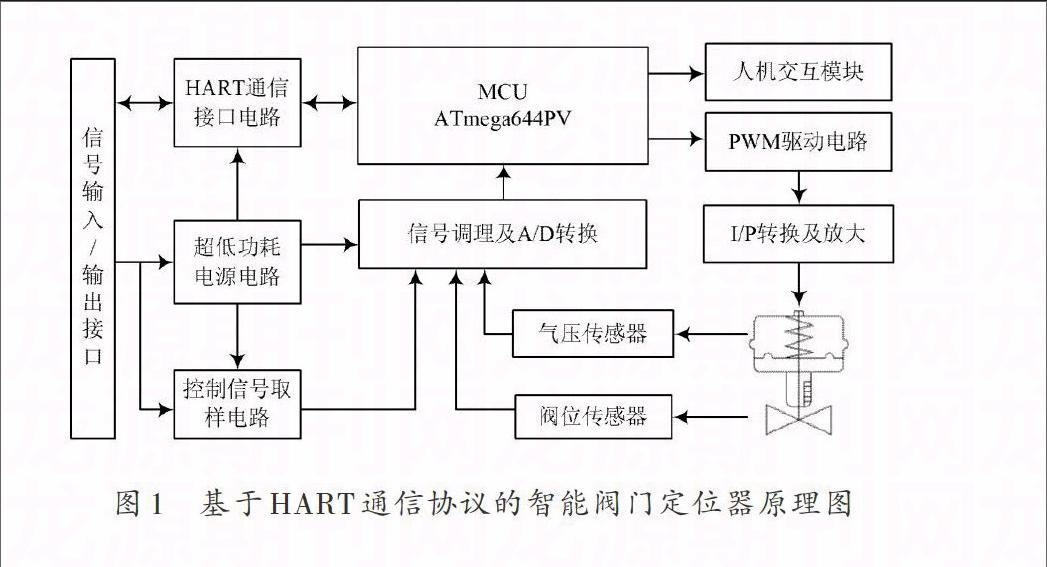
基于HART通信协议的智能阀门定位器原理框图如图1所示。其中,超低功耗电源电路用于4~20 mA电流信号转换成电压信号,为系统其他各功能模块提供稳定的工作电压。控制信号取样电路完成阀位设定信号的采样。人机交互模块主要显示控制阀的工作状态和输入工作参数。MCU 控制单元将阀门位置反馈电路检测的阀位信号和控制信号取样电路提供的设定值信号比较,将偏差信号进行一定的控制算法运算,包括流量特性的修正补偿,其输出驱动I/P电气转换及放大单元工作,从而实现被控阀的动作。HART通信接口实现MCU控制单元与外界的数据转换。压力传感器用于气动阀工作状态的监视和故障诊断。
2 智能阀门定位器的关键技术分析
2.1 系统低功耗设计
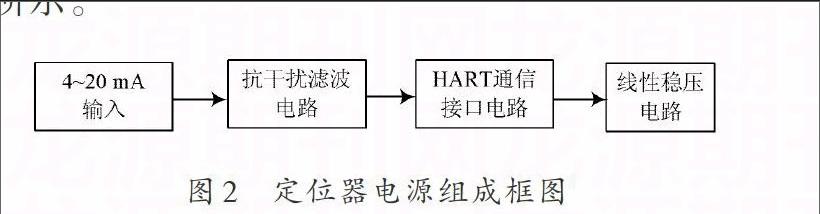
基于HART通信协议的智能阀门定位器为二线制设计,与外部的连接只有两条物理连线,4~20 mA 电流信号既是给定的阀门位置目标控制信号,也是整个定位器硬件电路正常工作的电源。电源电路原理框图如图2所示。
4~20 mA 电流信号经过抗干扰滤波电路、HART通信接口电路和线性稳压电路后产生低纹波系数的直流稳定电压。为了从控制信号摄取尽可能大的能量,按照4~20 mA输入电路能取出10 V电压估算,再减去HART通信接口电路的工作电压压降,线性稳压电路输出的稳定电压通常就为6.6 V。所以定位器从控制信号摄取的最小功率是26.4 mW(6.6 V×4 mA),最大功率是132 mW(6.6 V×20 mA)。考虑到定位器应在3.5 mA左右就必须正常工作,因此系统低功耗设计是智能阀门定位器研制的基础和关键技术之一。
2.2 阀位控制算法
软件是智能仪表的灵魂。智能阀门定位器软件主要完成的功能主要有数据采集、控制、人机交互、通信和系统初始化等。数据采集程序完成控制电流与阀位及气动阀压力的实时采样、转换和数字滤波等任务。控制程序主要是控制算法的具体实现。人机交互程序主要完成LCD显示、用户按键处理、故障分析与报警。通信程序完成HART通信协议的数据打包与解包、命令的解析等任务。系统初始化程序的任务是微处理器I/O与外围芯片初始化、重要数据存储与掉电保护设置等。
数据采集程序、人机交互程序和系统初始化程序跟其他智能仪表程序设计思路和流程基本相似,但是控制程序却有很大区别。不同规格的气动控制阀,其特征参数差异较大,非线性和大滞后是其标志性的特点。控制程序所实现的控制算法,直接决定了阀门定位器的控制精度及控制稳定性。
2.3 消除HART通信对控制实时性的影响
HART协议通信是一种半双工通信模式,由主控设备(上位机)发通信请求,智能阀门定位器作为从机响应。根据ISO的OSI参考模型,HART协议分物理层、数据链路层和应用层。物理层涉及硬件接口;数据链路层规定了波特率1 200 b/s、1位起始位、8位数据位、1位奇校验位、1位停止位以及数据帧的格式与校验等内容;应用层则对各种命令代码做统一的规范。
依据HART协议的通信格式可以计算出传送一个字符的时间大约9 ms。如果采用程序循环延时等待、连续发送的方式,一帧长数据就可能需要消耗0.5~1 s的CPU时间,阀位控制的实时性无法保证。
2.4 系统抗干扰及可靠性设计
低的电压和功耗与系统的抗干扰性、速度等性能存在着固有的矛盾,在降低功耗的同时必然意味着其他方面的性能损失。由于工作环境比较恶劣,智能阀门定位器所受到的干扰要远比在一般的工作环境中所受的干扰复杂。智能阀门定位器一旦被干扰,通常有3种问题出现:第一是采集的实时数据失真,造成阀位控制扰动及相关数据记录错误;第二是单片机程序跑飞,使程序陷入死循环而“死机”;第三种是程序跑飞导致系统存储的重要数据被改写。因此,为了确保可靠运行,提出并采取行之有效的抗干扰措施及可靠性设计也是智能阀门定位器研制的关键技术。
3 关键技术的实现
3.1 低功耗实现
智能电位器的低功耗实现与其他电池供电系统的低功耗实现有较大区别。电池供电系统中低功耗设计目的是实现电池的最长时间供电,设计依据是长期的功耗指标(或平均功耗);而智能阀门定位器是一个实时工作系统,低功耗设计目的是保证系统在3.5 mA电流输入情况下各功能模块均工作正常,设计依据是瞬时的最大功耗。在具体实现上,本设计采取了以下方法:
(1) 降低工作电压,提高电源转换效率。MCU及其外围器件的工作电压降低到3.3 V。通过电荷泵DC/DC而非低压差LDO模块,将6.6 V转换成3.3 V电压,最大限度地提高电源转换效率。同时,6.6 V电压通过DC?DC升压电路升压至24 V,为I/P电气转换单元供电。
(2) 选择超低功耗器件。采用基于AVR内核的8位低功耗控制器Atmega644PV,它有多种低功耗模式。在1 MHz,1.8 V低电压工作条件下,它的正常工作电流为0.4 mA,能很好地满足系统设计要求。
(3) 外围器件的电源管理。硬件设计方面,每个功能模块电路均有电源上电使能控制线,可由MCU控制;软件方面,合理安排和调度程序模块的执行,尽可能地减少在同一时刻处于工作状态的电路模块数量。MCU选择性的关断未处于工作状态电路模块的电源供给,从而降低系统的瞬时功耗。
3.2 控制算法实现
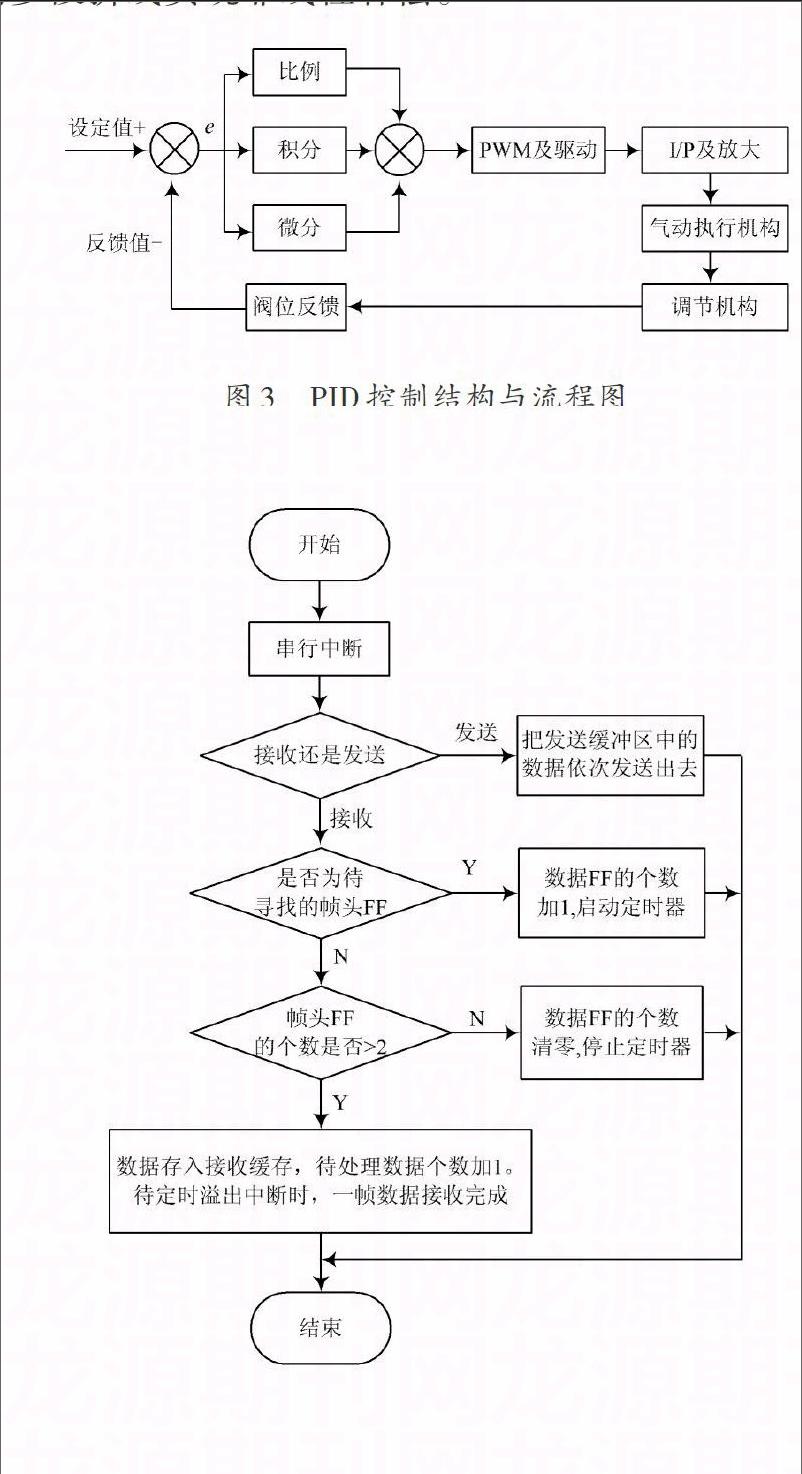
经过多次试验,本文选择积分分离PID算法取得较好的控制特性。控制结构及流程如图3所示。
其基本思想是:根据设定值与反馈值的误差e之正负确定执行器膜头进气还是排气。根据e的绝对值大小采用不同的控制策略。在误差e大于规定值时,微控制器切除积分项,PWM输出脉宽较大,阀位快速向设定值靠近;在误差e小于规定值时,微控制器引入积分项,PWM输出脉宽逐渐收窄,阀位缓慢接近设定值,直到误差e低于设定的死区,PWM不再输出信号,阀门位置保持不变。为适应应用要求,还设置流量特性补偿环节,用多段折线实现非线性补偿。
3.3 HART通信与实时控制兼容的实现
消除HART通信对控制实时性的影响,本文采取的方法是:通信数据的每一个字节收发都采用中断方式实现,提高CPU处理的效率。中断程序流程图如图4所示。在接收中断程序中,定位器对上位机数据帧进行识别和判断,判断依据是接收到的前导符0xFF个数以及字符间隔是否超时。发送中断程序则是将已传入发送缓存的数据逐个发送。接收数据帧的解析及发送数据帧的打包在主程序中实现。
3.4 抗干扰及可靠性设计实现
本文设计的智能阀门定位器采取了以下措施。
(1) 串入4~20 mA电流信号输入接口滤波电路。滤波电路如图5所示。该电路具有防反接、防过压、防过流、防浪涌、滤除共模干扰等功能。
(2) 软件数字滤波。数字滤波技术是比较成熟和行之有效的抗干扰措施,具体可参考相关文献。
(3) 采用“看门狗”技术。看门狗技术就是通过不断监视程序循环运行时间,若发现时间超过已知的循环设定时间,则强迫单片机程序返回到复位入口,使系统正常运行。它分为软件型、无独立时钟硬件型和有独立时钟硬件型。大量的实验表明,软件看门狗和无独立时钟的硬件看门狗都有可能因为单片机程序本身的故障而关闭失效。本文设计的智能阀门定位器采用了Atmega644PV单片机,其内部有一个带独立时钟且不受程序关闭的硬件看门狗,真正解决了智能阀门定位器“死机”的难题。
(4) 采用双E2PROM存储芯片技术。智能型阀门定位器因采用微控制器为核心,可通过程序内设参数极大地增强了控制的灵活性。但是,程序跑飞导致系统存储的重要数据被改写的现象时有发生,反而降低了阀门定位器的可靠性。其他文献提出的诸如软件锁、数据备份、数据校验与恢复、单片机BOD设置等措施,都只能减少该现象的发生。本文设计的双E2PROM存储芯片技术,较好地解决了这个难题。如图6所示,外部扩展的E2PROM数据存储需要人工按键使能,杜绝了程序跑飞导致重要数据改写的可能性;出厂校准、用户设置等重要参数均存储在该芯片中。AVR单片机内部的E2PROM数据存储不需要人工使能;定位器运行中的一些过程状态数据存储在此。
4 结 语
在笔者开发的基于HART通信协议的智能阀门定位器中运用前述方法, 获得了良好的系统性能。经过批量试用测试,该智能阀门定位器即使在恶劣的环境下运行稳定可靠。证明了本文所论述的关键技术及实现方法具有可行性和先进性,对相关产品的研制有重要的指导意义。
参考文献
[1] 李倩如,赖庆峰,毛晓明,等.HART协议的智能阀门定位器的设计和实现[J].自动化仪表,2010(6):55?57.
[2] 蔡明,白雪莲,章英.国产新型智能阀门定位器的设计[J].自动化仪表,2011(7):73?75.
[3] 卢桂荣.基于MSP430单片机的智能阀门定位器研究[D].南京:南京理工大学,2011.
[4] 卢超.单片机系统中的抗干扰及可靠性设计[J].仪表技术,2010(2):43?45.
[5] 刘海成. AVR单片机原理及测控工程应用[M].北京:北京航空航天大学出版社,2008.
[6] 彭大成,彭晨,任仁凯.基于无线网络的智能开关控制系统[J].现代电子技术,2014,37(19):132?135.
- 高新技术企业内部控制的问题及完善对策
- 国有企业进出口贸易公司内部控制相关问题探讨
- 论企业目标市场细分及营销策略
- 基于大数据技术的高校档案管理工作研究
- 加强成本控制,提高公司效益
- 技术商品在转化时的定价问题探讨
- 客户关系管理优化研究
- 中学内部控制现状及优化策略探析
- 当前环境下提升国有企业内部控制有效性的若干思考
- 关于国有企业集团内控体系建设的思考
- 基于绿色供应链管理的石化企业物流管理路径探究
- 新媒体背景下的培训机构运营管理模式分析
- 探索基于关系营销的中国高端白酒营销策略
- 港口生产安全管理存在的主要问题与对策分析
- 纺织服装业并购后的内部整合分析
- 基于众创空间的小微企业科技创意的孵化研究
- 体感健身产品的营销策略研究
- 浅谈连锁超市存货管理的有效性
- 工商管理对于企业科技创新发展的重要作用研究
- 物联网对汽车企业商业模式创新的影响
- 影响企业电子商务的关键因素研究
- 企业电子商务发展策略的思考
- 跨境电商企业的自主品牌营销策略分析
- 网络直播在农村电子商务中的应用研究
- 网络直播营销分析
- unsteadfastness
- unsteadfastnesses
- unsteadied
- unsteadier
- unsteadies
- unsteadiest
- unsteadily
- unsteadiness
- unsteadinesses
- unsteady
- unsteadying
- unstealthier
- unstealthiest
- unstealthily
- unstealthiness
- unstealthinesses
- unstealthy
- unsteamed
- unsteaming
- unsteek
- unsteeped
- unsteepled
- unsteerable
- unstereotyped
- unsterilized
- 咀啖
- 咀啮
- 咀噍
- 咀嚅
- 咀嚼
- 咀嚼吞食
- 咀嚼品味
- 咀嚼的样子
- 咀嚼英华
- 咀嚼辨味
- 咀嚼食物的样子
- 咀嚼食物的能力
- 咀实含英
- 咀宫嚼商
- 咀征含商
- 咀英吸华
- 咀茹
- 咀药
- 咂
- 咂了一口
- 咂儿
- 咂儿咂儿
- 咂吮
- 咂味
- 咂咂