
摘 要: 针对自适应滤波器阶数失配问题,提出一种改进的变误差宽度分数阶变阶数LMS算法。该算法中误差宽度函数参数选择不受噪声先验知识的限制,并给出参数选择的依据。对提出的算法分别在高噪声、低噪声以及变化的噪声环境下进行仿真分析,仿真结果表明,该算法在未知系统噪声大小或大小变化的噪声环境能够应用,并且具有良好的性能,尤其在高噪声环境下能够获得较快的阶数收敛速度和较小的稳态误差,因此该算法的应用场合更加广泛。
关键词: 自适应滤波器; 模型失配; 分数阶变阶数; 变误差宽度
中图分类号: TN911?34 文献标识码: A 文章编号: 1004?373X(2017)01?0041?04
Abstract: In order to solve the order mismatch problem of the adaptive filter, an improved variable error width variable fractional tap?length LMS algorithm is proposed. The parameter selection of the error width function isn′t limited by the noise prior knowledge in the algorithm, and its foundation is given. The simulation analysis are performed for the algorithm under the environments of low noise, high noise and changing noise. The simulation results show that the algorithm can be applied to the environments of the unknown system noise or changing noise, has good performance, can obtain fast order convergence rate and small steady?state error in high noise environment, and its applications are extensive.
Keywords: adaptive filter; model mismatch; variable fractional tap?length; variable error width
0 引 言
在自适应滤波应用中,大多数算法一般假设滤波器阶数(或抽头长度)是适配的;但如果滤波器阶数小于实际阶数,将会增大均方误差值;相反,滤波器阶数过大,不仅会带来很大计算量,同时会增大稳态误差。由此可见,滤波器阶数是一个重要参数。
在实际应用中为了能够确定滤波器的最佳阶数,变阶数算法是一类有效的方法,典型算法主要有:分割滤波器LMS算法[1],梯度下降LMS算法[2],分数阶变阶数LMS算法[3?4](Fractional Tap?length Least Mean Square,FTLMS),凸组合变阶数LMS算法[5?6],变迭代参数的变阶数LMS算法[7?8]和变误差宽度变阶数LMS算法[9?10](Variable Error Width Variable Fractional Tap?length LMS Algorithm,VW?FTLMS)等。其中文献[3]FTLMS中滤波器阶数迭代的代价函数采用片段稳态均方误差,滤波器阶数更新依赖于分数阶数变化量的积累,保持了文献[1?2]中算法的优点,该算法简单灵活,是分数阶变阶数类算法的基础。文献[5?6]算法利用凸优化理论将两个FT算法组合,重在提高均方误差的收敛速度和降低稳态误差。为了平衡滤波器阶数的收敛速度和稳态振荡之间的矛盾,文献[7?8]算法采用变迭代参数,但无法避免产生次优解。文献[9]中VW?FTLMS算法采用变误差宽度,保证滤波器阶数能够有较快的收敛速度和较小的稳态振荡的同时避免次优解的产生,但其误差宽度函数的参数选择依赖于噪声的方差,使得算法在未知噪声先验知识或者噪声变化的环境下应用受到限制。
本文在VW?FTLMS的基础上,提出一种改进的变误差宽度变阶数LMS算法(Improved Variable Error Width Variable Fractional Tap?length LMS Algorithm,IVW?FTLMS)。消除误差宽度函数的参数选择对噪声方差的依赖,使其能够在未知噪声先验知识或者噪声环境变化的条件下依然能够获得较快的阶数收敛速度和较小的稳态振荡。
1 IVW?FTLMS算法原理
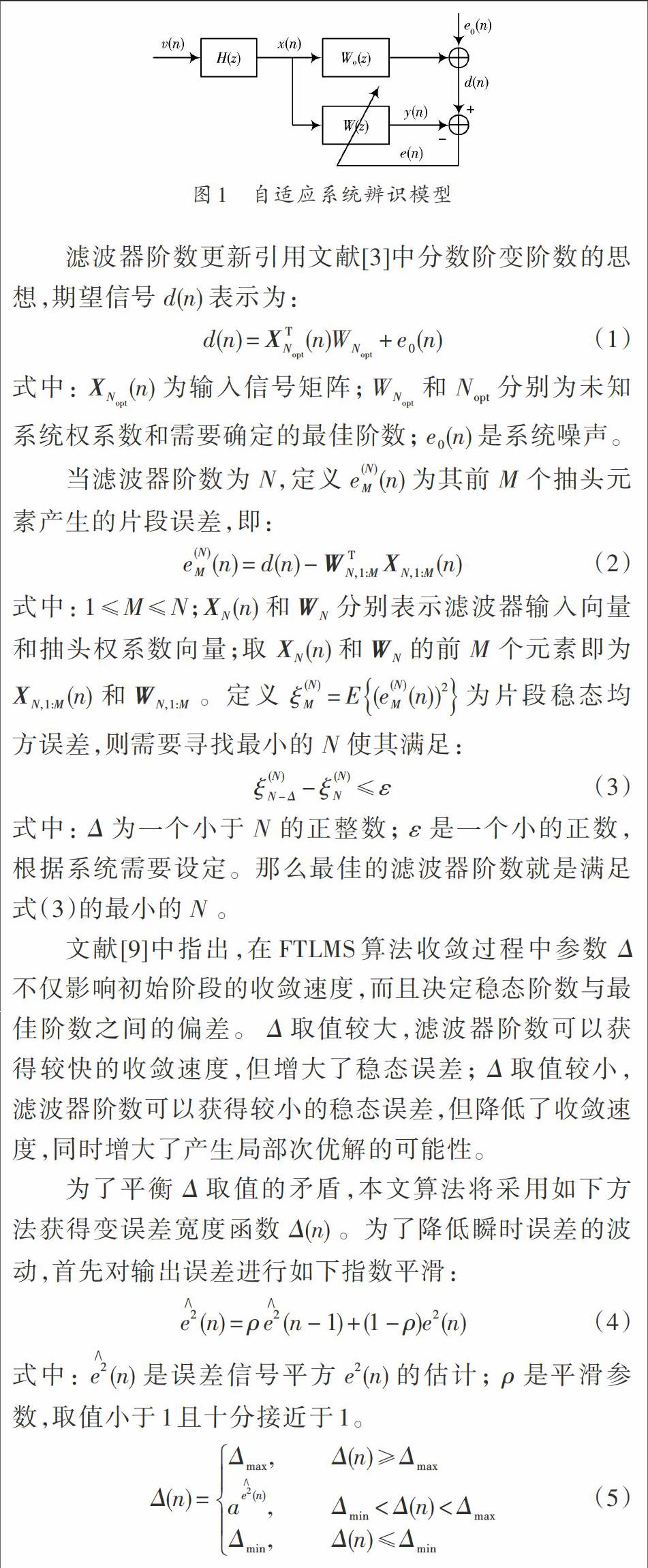
本节用系统辨识模型来设计IVW?FTLMS算法,系统结构如图1所示。
VW?FTLMS算法中正比于,其比例系数的选取依赖于噪声的方差,在实际应用中,在未知噪声先验知识或噪声不断变化的情况下使得该算法性能恶化甚至无法应用;即使噪声可以测量,也因其繁琐而不便应用。而且在文献[9]高噪声实验中值保证了取得最小值,却由于线性函数扩展能力差使得最大值受到限制,降低了阶数的收敛速度。
本文提出IVW?FTLMS算法,式(5)中在区间内是一个指数函数,通常的取值在之间。底数的取值依据是能够保证稳态时即为了兼顾不同大小的噪声,通常取值在之间。相比于VW?FTLMS,本文算法不依赖于噪声先验知识,因此可以在未知噪声先验知识的环境下应用;同时由于指数函数较线性函数扩展能力强,能充分保证可以获得较大初始值和较小的稳态值,因此可以在噪声变化的环境下应用。
3 仿真分析
3.1 低噪声,的仿真结果
低噪声环境仿真设置如下:未知系统冲击响应是一个高斯白噪声序列,其均值为0、方差为0.01,长度设为200。输入信号为随机高斯信号,其均值为0,方差为1。噪声信号为随机高斯信号,其均值为0,并乘以一定的比例系数使得SNR达到20 dB。将本文算法与VW?FTLMS进行仿真比较。根据文献[4]中稳态分析,两种算法中的参数选为2,选为0.5,泄露因子为0.005,平滑因子,取为50。本文算法取为5,取为8。VW?FTLMS算法中取为5,根据式(11)计算得到为375。仿真结果如图2,图3所示。
从图2可以看出,低噪声环境下两种算法的误差宽度都具有初始值大,并逐渐减小的特点。由于指数函数较线性函数扩展能力强,使得本文算法在初始阶段变化极快。在图3中,本文算法和VW?FTLMS算法都有相同较快的阶数收敛速度和较小的稳态误差,两者的阶数变化大致相同。因此,在低噪声环境下,本文算法的阶数能够获得较快的收敛速度和较小的穩态误差。
3.2 高噪声,SNR=0 dB的仿真结果
高噪声与低噪声环境仿真设置类似。区别在于噪声信号为随机高斯信号,其均值为0,并乘以一定的比例系数使得SNR达到0 dB。将本文算法与VW?FTLMS进行仿真比较。根据文献[4]中的稳态分析,两种算法中的参数选为2,选为0.05,泄露因子为0.005,平滑因子取为40。本文算法取为5,取为6。VW?FTLMS算法中取为10,根据式(11)计算得到为9.75。仿真结果如图4,图5所示。
从图4可以看出,高噪声环境下两种算法的误差宽度都具有初始值大,并逐渐减小的变化趋势,由于VW?FTLMS算法中线性函数扩展区间的能力弱,使得其在最大值受到限制。本文算法能达到设定的最大值,其优势体现在图5中,使得本文算法阶数的收敛速度更快。两种算法的稳态误差都很小,因此,在高噪声环境下,本文算法的阶数能够获得更快的收敛速度和较小的稳态误差,性能优于VW?FTLMS算法。
3.3 变化的噪声环境仿真结果
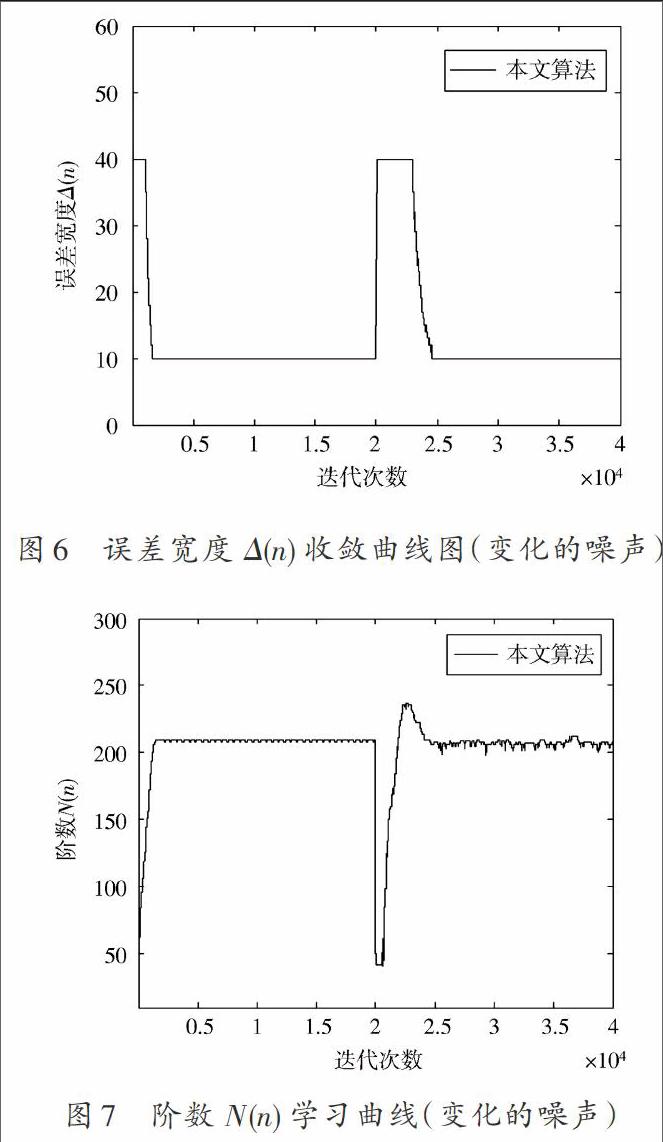
变化的噪声环境下仿真设置与高噪声环境类似。区别是当的模拟低噪声环境,噪声信号为随机高斯信号,均值为0,并乘以一定的比例系数使得SNR达到20 dB。当时模拟高噪声环境,噪声信号为随机高斯信号,均值为0,并乘以一定的比例系数使得SNR达到0 dB。在噪声大小变化的环境下,根据文献[4]中的稳态分析,参数选为2,选为0.2,泄露因子为0.005,平滑因子取为40,取为10,为6。仿真结果如图6,图7所示。
由于VW?FTLMS算法的误差宽度函数中参数在噪声大小变化的环境下取值不同而无法应用。而本文算法的误差宽度函数参数不受噪声先验知识的限制且能迅速地追踪输出误差的变化,从图6中可以看出,在高噪声和低噪声环境下误差宽度函数都能保持初始值大,稳态值小的特点;从图7可以看出,滤波器阶数的收敛速度快,稳态误差小。因此本文算法在变化的噪声环境下具有很好的适应性。
4 结 语
本文提出一种改进的变误差宽度变阶数LMS算法,并进行仿真,结果表明:本文算法在低噪声、高噪声环境下能够获得较快的阶数收敛速度和较小的稳态误差,尤其在高噪声环境下,相比于VW?FTLMS算法,本文算法阶数收敛速度更快,性能更好;在变化的噪声环境或噪声大小未知的条件下,VW?FTLMS算法无法应用,但本文算法误差宽度参数选择简单,不依赖于噪声的先验知识,能够获得较快的收敛速度和较小的稳态误差。总之,本文算法提高了阶数的收敛性能,扩大了应用范围,具有明显优势。
参考文献
[1] RIERA?PALOU F, NORAS J M, CRUICKSHANK D G M. Li?near equalizerswith dynamic and automatic length selection [J]. Electronics letters, 2001, 37(25): 1553?1554.
[2] GU Y T, TANG K, CUI H J. LMS algorithm with gradient descentfilter length [J]. IEEE signal processing letters, 2004, 11(3): 305?307.
[3] GONG Y, COWAN C F. An LMS style variable tap?length algorithm for structure adaption [J]. IEEE transactions on signal processing, 2005, 53(7): 2400?2407.
[4] ZHANG Y G, LI N, CHAMBERS J A, et al. Steady?state performance analysis of a variable tap?length LMS algorithm [J]. IEEE transactions on signal processing, 2008, 56(2): 839?845.
[5] 芮国胜,苗俊,张洋,等.改进的凸组合变阶数LMS自适应滤波[J].应用科学学报,2012,30(6):601?606.
[6] 芮国胜,苗俊,张洋,等.变宽度凸组合变阶数LMS自适应滤波算法[J].系统工程与电子技术,2012,34(3):451?456.
[7] 李宁,张勇刚,赵玉新,等.一种变迭代参数的变阶数LMS算法[J].数据采集与处理,2010,25(3):378?383.
[8] XU D J, YIN B, WANG W, et al. Variable tap?length LMS algorithm based on adaptive parameters for TDL structure adaption [J]. IEEE signal processing letters, 2014, 21(7): 809?813.
[9] 张勇刚,李宁,郝燕玲.改进的变阶数LMS自适应滤波算法[J].哈尔滨工程大学学报,2010,31(3):350?354.
[10] KAR A, CHANDRA M. Performance evaluation of a new variable tap?length learning algorithm for automatic structure adaptation in linear adaptive filters [J]. AEU?international journal of electronics and communications, 2015, 69(1): 253?261.
- 浅析现阶段高职教育管理中存在的问题与对策
- 中药炮制实验课程改革探索
- 中职学校开展职业规划教育的实践探索
- 怎样上好一堂病理课
- 初探儿科护理教学中的情境式教学法
- 研究生培养质量保障体系与机制的探索和实践
- 物流工程专业减速器工程图设计教学探讨
- 基于新形势下中职学校教学改革的思考与探索
- 手术室护理教学中多元化教学方法的应用分析
- 对中职机电专业理实一体化教学方法的研究
- 护理技术操作教学中护理安全教育的应用
- 高职院校电子商务专业教学模式现状分析
- 加强师资队伍资料的归档工作以促进非直属附属医院教学质量的提高策略初探
- 探索中职生职业核心能力的培养
- 中职教学管理模式改革的几点思考
- 高职法律专业公文写作课程提高教学有效性的途径探析
- 雨课堂平台在MBBS留学生影像医学辅助教学的应用
- 基于核心素养视域下高师学前教育专业课程改革与实践
- 《理智与情感》中的语言风格简析
- 应用型人才培养背景下电子商务专业人才培养体系构建
- 我教幼儿学说话
- 新时期高校《广告策划与创意》课程教学改革与实践探究
- 网络技术发展下的大学课程建设思考
- “互联网+教育”背景下工商管理类课程教学改革研究与实践
- 浅谈朋辈心理辅导的实践与思考
- evil²
- evil¹
- evocation
- evocative
- evocatively
- evocativeness
- evocativenesses
- evoke
- evoked
- evoker
- evokers
- evokes
- evoking
- evolution
- evolutionally
- evolutionarily
- evolutionary
- evolutionisms
- evolutionists
- evolutions
- evolvable
- evolve
- evolved
- evolvement
- evolvements
- 鹿车鸿案
- 鹿迷
- 鹿迷隍
- 鹿逐
- 鹿道士
- 鹿 部
- 鹿野
- 鹿铤
- 鹿门
- 鹿门山
- 鹿门携
- 鹿门栖宿
- 鹿门翁
- 鹿门采药
- 鹿霓衣
- 鹿韭
- 鹿顶
- 鹿马
- 鹿马之奸
- 鹿驯豕暴
- 鹿骇
- 鹿鸣
- 鹿鸣呦呦
- 鹿鸣客
- 鹿鸣宴