禹玮
摘? 要:文章将模糊控制引入曝气量控制中,使用MATLAB软件辅助设计模糊控制器,并通过Simulink仿真验证,使得污水处理过程中溶解氧值在工艺要求范围内波动,证明了模糊控制器在曝气量控制方面具有良好的控制效果。
关键词:污水处理;曝气量控制;模糊逻辑控制;DO值控制
中图分类号:X703? ? ? ? ?文献标志码:A? ? ? ? ?文章编号:2095-2945(2020)26-0023-03
Abstract: In this paper, the fuzzy control is introduced into the aeration control, and the fuzzy controller is designed with the aid of MATLAB software, and verified by Simulink simulation, the dissolved oxygen value in the sewage treatment process fluctuates within the process requirements, which proves that the fuzzy controller has a good control effect in aeration control.
Keywords: sewage treatment; aeration control; fuzzy logic control; DO value control
引言
随着我国经济发展,社会对生态文明建设的不断推进,对各种污染物排放标准也在不断提高,这要求污水处理厂必须对现有工艺与控制方法进行改进。活性污泥法污水处理技术是污水处理常用的一种工艺,而其中曝气量的控制有着重要意义。曝气量不足容易使水质下降,达不到环保要求,而曝气量过多,一则是使得污水硝化,水质品质下降,再则使得能耗增高,增加支出,经济效益减低。由于污水处理动态过程复杂,一般控制方法难以达到要求。在实践中,一般依靠人工经验进行曝气量的判断,结果是能耗较大且控制效果不稳定。
智能控制是人们在探索传统控制方法无法有效解决的一些工程问题时所发展的若干理论。而模糊控制是智能控制中应用较为广泛的一种,该方法以模糊数学为理论基础,将人们的实践经验用模糊数学的方法描述,使得该方法在一些非线性的领域具有不错的控制效果。
本文将模糊控制引入曝气量控制中,与传统控制方法相比,模糊控制可以更自然有效地将人的控制策略和经验转换为机器可执行的控制策略[1]。本文设计一种模糊控制器,使得污水处理过程中溶解氧值在工艺要求范围内波动,证明了模糊控制器在曝氣量控制方面具有良好的控制效果。
1 曝气控制系统的设计
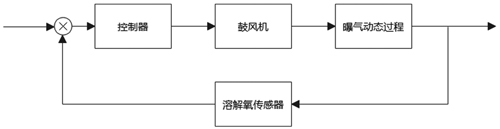
在污水处理过程中,污水处理生化池中的水体生化动态过程中,耦合了很多的扰动因素,所以很难准确测量和控制。因此,在实践中,一般选择将生化池出水口处的污水DO浓度维持在一个定值,在该定值下,既能促进污水中有机污染物分解,又能够很好保持污水中的污泥活性[2]。实践表明,该定值为2mg/L。所以本文控制策略为控制水体中的溶解氧值,使其保持恒定,控制系统框图如图1所示。
1.1 曝气系统动态模型
污水处理中的生化反应过程是多变量强耦合的系统,建立其精确的数学模型相当困难。在若干合理假设后,根据溶解氧的物料平衡算式[3]:
DO浓度变化率=DO输入率-DO输出率-DO消耗率
根据对曝气系统的分析并参考文献[4],可进一步得到曝气系统动态模型为
1.2 鼓风机模型
在实际的工程项目中,曝气机是由三相异步电机驱动的,目前三相异步电机大多采用变频技术来驱动,变频器改变输出频率,进而改变鼓风机的转速,使得鼓风机转速随着溶解氧变化而成比例变化,转速无级可调,可平稳调整风量。变频技术的使用也带来了节能的优点。根据对实际的污水处理厂数据的分析并参考文献[5],可以得到鼓风机的数学模型为:
1.3 控制器的设计
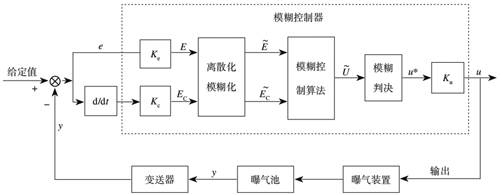
控制器的输出为变频器运行频率,控制器的输入可以选择控制变量的误差,即测量DO值与设定DO值的偏差,这样构造为一维模糊控制。一维模糊控制虽然实现简单,但是控制效果有限,故而本文选择两个输入量,DO的偏差量E以及E的变化率Ec,所设计的模糊控制器结构见图 2。
在MATLAB软件的帮助下,可以很方便的实现所设计模糊控制器。具体设计过程如下:
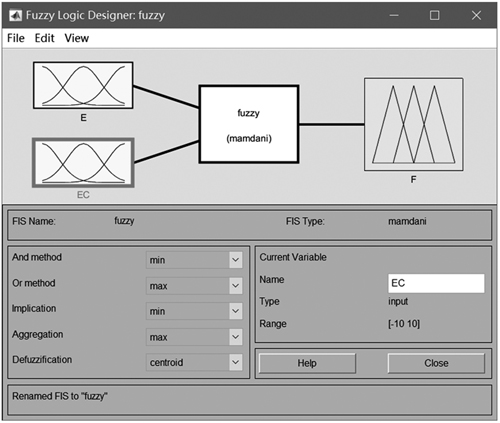
(1)根据污水处理的经验数据,模糊控制器的输入输出范围。本文中 DO值偏差的取值范围为[-5,5]、偏差变化速率Ec取值范围[-10,10],输出控制量u的取值范围为 [0,1000]。
(2)在MATLAB软件中,调用Fuzzy控制器设计工具进行模糊控制器进行设计。在设计参数输入界面,选择输入输出变量个数,并确定输入参数和输出参数的范围,界面见图3。
(3)输入输出变量的模糊化。将输入变量e分为5个模糊子集(见图4),ec分为5个模糊子集,u分为5个模糊子集,分别设置隶属度函数。隶属度函数决定了对输入量如何“定性“,对于连续模拟量输入常见的隶属度函数可以是高斯型或者S形等隶属度函数。本设计选择高斯型隶属度函数。
(4)制定模糊控制规则表。根据该控制系统输入参数模糊子集数量,确定5×5=25条模糊控制规则,其结果见图5。
(5)输出模糊量的解模糊。将模糊控制系统的“大”、“小”等模糊输出量转换为可以在系统中使用的精确量这一过程称为解模糊。解模糊的方法有最大隶属度法、重心法和加权平均法等,本控制系统中选择重心法。
2 仿真分析
为了证明本设计的实用性和可操作性,运用MATLAB仿真软件中的模糊控制工具箱和simulink模块进行仿真。结合污水处理溶解氧的过程,将控制系统简化为由一个比例环节、一个滞后环节和两个一阶惯性环节所组成的预估模型。
首先在MATLAB中使用Fuzzy控制器設计工具,按照上面的设计步骤设计模糊控制器,所得到的设计可以存为文件后缀为FIS的文件。然后在Simulink窗口中添加对应模块,将创建好的模糊控制器与FIS文件建立链接,建立基于模糊控制下的溶解氧控制系统的仿真模型,如图6所示。图7为阶跃信号响应,从仿真结果看,该系统性能良好。
3 结论
溶解氧浓度的控制,是活性污泥法工艺中关键要素。但在工程实践中,由于系统具有多变量、强耦合、非线性,使得无法精确确定控制过程的数学模型,故而在运用经典的控制方法处理时,使得工艺处理效果不佳。所以一般污水处理厂普遍采用人工的方法控制曝气机的曝气量,虽然符合工艺要求,但是能耗较大。本文设计了一种采用模糊控制的控制器,并进行了仿真,结果表明该控制器在溶解氧浓度控制方面具有较好表现。
模糊控制规律可实现与有经验的人工相似的控制反应,从而使得模糊控制适用于一些传统控制方法比较难处理的被控对象。在污水处理工艺控制策略中引入智能控制,具有良好的效果。
参考文献:
[1]金晓明,荣冈,王骥程.自适应模糊控制新进展[J].信息与控制,1996,25(4):217-223.
[2]张伟,李东华,武少伟,等.在线溶解氧仪在智能曝气系统中的应用[J].自动化仪表,2014,35(8):83-85.
[3]Lira V V, Barros P R, Neto J S D R, et al. Automation of an anaerobic-aerobic wastewater treatmentprocess[J]. IEEE Transactions on Instrumentation & Measurement, 2003,52(3):909-915.
[4]张崇.曝气系统控制方法的研究[D].大连:大连理工大学,2016.
[5]原魁.污水处理厂曝气系统的控制研究[D].沈阳:东北大学,2011.
- 豪华落尽见真淳
- 历史教师要多读点历史人物传记
- 浅谈转化思想在高中数学中的应用
- 对立足生活改善高中政治教学的思考
- 试论初中班主任管理中的激励措施
- 思维导图在初中数学教学中的应用
- 探究高中体育模块选项教学中存在的问题及其解决对策
- 情真意切诉衷肠
- 初中物理自主学习兴趣培养方式
- 重组学生 演绎动态高效课堂
- 分析初中英语阅读教学与写作教学的结合
- 文化经典教育对新时期农村中学生养成教育的作用探究
- 试论“导学互动”教学模式对初中数学教学的作用
- 浅谈如何用好新教材,培养学生的语文核心素养
- 谈小学德育教育与心理健康教育的有效整合
- 融入式高中物理双语教学的实践探索
- 新课程背景下高中生物教学采用合作教学法的研究
- 初中数学导学案存在的问题及对策分析
- 渗透公民意识,提升历史核心素养
- 高中语文教学中教师教学行为的研究
- 探究初中语文教学应如何进行提问
- 文化品格视角下初中英语教学策略探究之中西方文化差异
- 融情以致深,汇思以行远
- 对高中化学导学案教学模式的研究
- 高中生物教学方法研究
- regrading
- regrafted
- regrafting
- regrafts
- regranted
- re-granted
- re-granting
- regranting
- regrants
- re-grants
- regraph
- regraphed
- regraphing
- regraphs
- regrasp
- regrasped
- regrasping
- regrasps
- regrease
- regreased
- regreases
- regreasing
- regreen
- regreened
- regreening
- 不变节
- 不变词类
- 不变资本
- 不变重音
- 不变量之王
- 不古
- 不古不今
- 不另
- 不只
- 不只一个,竟然还有配对的
- 不叫画(话)
- 不叫的狗
- 不叫的狗——暗下口
- 不可
- 不可一世
- 不可一二
- 不可一代
- 不可一例而视
- 不可一日无此君
- 不可一日近小人
- 不可一时
- 不可一试(世)
- 不可不信,不可全信
- 不可为法
- 不可为训