庄佳琪

摘 要:本文将针对智能汽车自动驾驶的控制方法进行简要分析和探究,旨在有效提升汽车自动驾驶技术的应用效果,为智能汽车创造更加广阔的发展空间。
关键词:智能汽车;自动驾驶;控制方法
引言
随着人们生活水平的不断提升,对于出行工具的选择提出了更高的要求。现代科学技术的发展使得越来越多的智能汽车被广泛应用于人们的日常生活,而自动驾驶技术的应用与发展更加提升了智能汽车的使用性能。通过智能汽车自动驾驶的控制系统能够有效满足智能汽车自动驾驶的需求,明确自动驾驶控制的方法,并在仿真验证分析中,有效提升智能汽车自动控制的效果,提高汽车自动驾驶的水平。
1 智能汽车自动驾驶车辆控制模型的构建
在对智能汽车自动驾驶系统监督的过程中,系统的控制运行中转向和转角与对车辆的控制存在一定关系,因此,要想提升汽车运行控制的监督质量,需要在建立智能汽车自动驾驶系统控制模型的过程中,根据道路行车的实际控制情况、汽车方向盘转角的控制和汽车间距的控制构建模型。接下来,根据智能汽车自动驾驶控制的实际需求,根据大地坐标系将整个汽车驾驶控制中的坐标体系模型进行构建,并对坐标系的控制数据模型进行适当调整,确保在对模型的控制与调整工作中有效提升对智能汽车自动驾驶控制系统的控制效果。在对系统描述功能进行控制的过程中,能够对智能汽车自动驾驶控制系统进行监督。根据图1可看出,在构建数据模型时,严格根据汽车仿真系统的构建要求,对汽车自动驾驶控制系统控制中的数据和模型做出了有效调整,并根据智能汽车自动驾驶控制的实际需求,开展车辆自动驾驶控制中的行驶模型的设计工作,同时,对汽车自动驾驶系统控制的过程中,对汽车的控制状况、道路情况以及仿真信息进行全面分析,确保在智能汽车自动驾驶的过程中,使汽车对前方路况的监督状态以及系统的控制反馈为一个整体,并通过调节汽车的反馈系统对汽车的智能化监督控制体系进行相应调整,进而提升对整个车辆的自动控制效果。
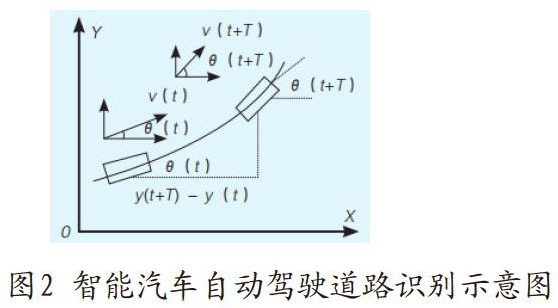
2 智能汽车自动驾驶车辆道路状况的识别
在智能汽车自动驾驶过程中,需要明确掌握前方道路的具体情况,因此,需要通过对道路状况信息的处理与识别,确保汽车运行的安全性和稳定性。在此过程中,利用GPS定位系统与智能汽车自动驾驶的控制系统对道路及车辆情况进行识别和调整,并根据车辆道路的实际情况对监督控制信息进行有效识别。由图2能够看出,在对车辆和道理情况进行识别的过程中,采用的是状态识别监督控制体系,并根据汽车运行监督控制的实际要求,对道路的实际情况进行有效识别。图2中显示点t为汽车监督运行的时刻,将其与道路识别的情况进行有效整合,能够确保在汽车的识别监督和控制工作中,有效提升车辆自动驾驶的监督水平。在汽车对道路情况进行识别的过程中,在需要进行转向时,需要根据对自动驾驶的监督控制需求,对汽车的转速、转向的行驶趋势以及加速度的变化进行有效控制,并确保对整个车辆运行过程的有效监督,保证车辆转向的精准度。如果汽车在道路状况识别的过程中,由于已知向量导致车辆运行向着纵向趋势进行变化,那么需要通过设立相应的车辆状态监督形态,实现对汽车自动驾驶的有效控制。在汽车对道路状况进行识别的过程中,汽车的状态信息和汽车的运动状况发生着改变,此时,需要通过明确车辆的状态信息和车辆方向盘的转动角度对汽车进行有效控制,进而提升汽车自动驾驶中对道路的自动识别能力,确保智能汽车自动驾驶过程的稳定性与可靠性。
3 智能汽车自动驾驶模糊自适应PID自动驾驶系统
在对智能汽车自动驾驶的控制过程中,需要根据汽车自动驾驶控制的基本要求,有效调整与转变车辆的自动驾驶控制体系,进而有效提高智能汽车自动驾驶控制的效果。本文研究了通过车辆模糊自适应PID自动驾驶系统对智能汽车自动驾驶过程的有效控制,应用该方法对汽车行驶过程中的程序以及各项参数变化进行掌握与分析,并对车辆运行算法模型进行统计与整合。在传统模糊控制的过程中,对汽车自动驾驶控制中的参数变化以及汽车的自適应能力变化进行了相应的调整与改善,同时,通过自动模糊控制体系的应用,极大改善了智能汽车自动化控制的传输效果,在汽车运行状态改变的过程中,有效缩小了汽车自动控制角度和方向的误差值。因此,模糊自适应PID自动驾驶系统的应用能够有效提高智能汽车自动驾驶的控制水平,进而有效确保智能汽车在自动驾驶过程中的平稳性与安全性。
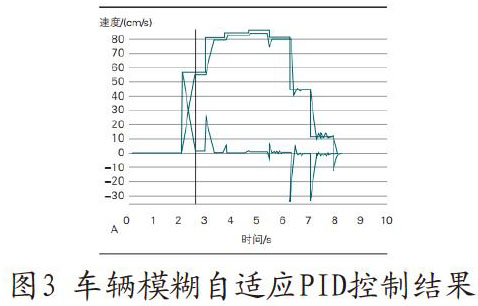
4 智能汽车自动驾驶控制仿真验证
对整个智能汽车自动驾驶控制体系的仿真实验进行调整的过程中,需要严格按照智能汽车自动驾驶控制的要求进行。模糊自适应PID控制体系的应用对汽车的自动驾驶运行状态进行了有效的控制,提升了汽车监督控制形式的合理性和有效性,同时,通过对汽车运行的监督与控制,根据构建仿真模型的要求对智能汽车自动驾驶进行有效的验证。通过图3可以看出,智能汽车自动驾驶控制技术水平提升的同时,使得相应的模糊控制稳定性产生了一定变化,因此,为保证更好的汽车自动驾驶运行的监督控制水平,需要根据控制工作的具体要求,及时对汽车的瞬时加速度和汽车的运行速度及时间进行有效调整,进而确保智能汽车自动驾驶过程的安全性与平稳性。
结语
综上所述,自动驾驶技术的发展为智能汽车带来了更加光明的发展前景和更加广阔的发展空间。因此,为了有效提升智能汽车自动控制系统运行的效果,需要利用模糊自适应PID控制方法,对汽车的整个运行控制过程进行调整,同时利用仿真验证将汽车运行控制中的构件进行组建,进而实现对该控制方法应用效果的分析,使得智能汽车在大地坐标系实时定位监督的控制中,保持良好的自动驾驶效果。
参考文献
[1]来飞,黄超群,胡博.智能汽车自动驾驶技术的发展与挑战[J].西南大学学报(自然科学版),2019,41(08):124-133.
[2]李盛福.复杂环境下智能汽车自动驾驶系统研究[J].机械设计与制造,2019(05):199-203+207.
- 试论档案学视角下高校记忆建构研究
- 疾病预防控制机构仪器设备档案管理探讨
- 精细化管理在档案管理中的应用实践
- 加强医院档案管理促进医院持续发展
- 档案馆异地备份库建设模式及选址原则
- 浅谈依法治档工作中存在的问题与对策
- 浅析新时期机构编制档案管理工作的重要性
- 新形势下会计档案管理的现状及创新途径
- 科学的绩效评价实现医院人事档案管理的创新和优化分析
- 国有企业人事档案管理的现状与对策分析
- 浅谈农机档案的收集及整理工作
- 讨论档案鉴定标准与档案法规及档案标准化关系
- 不动产登记档案管理工作的思考
- 大学生档案管理模式创新与实践
- 浅论文博理论知识对博物馆工作的重要性
- 档案展览解说词撰写方法的探究
- 计划生育服务中心档案管理的现代化发展
- 学校基建档案管理工作的现状及对策分析
- 事业单位基于PDCA的思政工作新机制研究
- 浅谈医院新进员工岗前培训中加强党建的重要性
- 工会如何做好职工的思想政治工作
- 新时代基层政工人员如何做好党建工作
- 提升医院青年职工思想政治工作实效研究
- 公立医院编制备案制度健康运行研究
- 宜昌市社会养老服务体系现状及对策研究
- vased
- vaseful
- vaselike
- vaseline
- vases
- vast
- vaster
- vastest
- vastly
- vastness
- vastnesses
- vasts
- vat
- vatman
- vatmen
- vats
- vatted
- vatting
- vault
- vaultcash
- vault cash
- vaulted
- vaultier
- vaultiest
- vaultlike
- 竹根在地下延伸生长
- 竹根黄
- 竹案
- 竹桥
- 竹梃
- 竹梜
- 竹棍
- 竹椅
- 竹椅轿
- 竹榻
- 竹欠
- 竹母
- 竹沥
- 竹泪
- 竹洲集
- 竹浦
- 竹浪
- 竹清松瘦
- 竹溪
- 竹溪六逸
- 竹瀁
- 竹烟波月
- 竹爿
- 竹牀
- 竹片