摘要:三维激光扫描技术是测绘领域,继 GPS 技术之后诞生的又一次技术革命,又被称为实景复制技术[1]。具有快速,非接触式, 实时、 动态、 主动性, 高密度、 高精度, 数字化、 自动化等其他功能[2],為快速建立物体的三维影像模型提供了一种全新的技术手段。本文拟通过对三维激光扫描技术在隧道施工应用中的数据采集及预处理过程进行阐述,进而说明此过程对后续三维影像模型生成的重要影响。
关建词:激光扫描 点云数据 数据处理
中图分类号:? TP391.4??? 文献标志码:A
1、引言
三维激光扫描测量系统由三维激光扫描仪、数码相机、电源以及附属设备组成。它的工作原理是:利用三维激光扫描仪对观测目标进行扫描,通过测得三维扫描仪中心到目标点的斜距、激光束水平方向偏转角和激光束竖直方向偏转角来计算观测点的相对三维坐标,然后与全站仪测得测量坐标系下的同名点坐标进行转换,得到各激光点在测量坐标系下的坐标。测量过程中受到仪器本身和外界条件的影响点云数据中会包含大量无效冗余数据,这些数据会对后期被测物体的建模产生严重影响,所以必须要对这些数据进行预处理[3]。
2、三维激光点云数据获取
2.1扫描仪设站
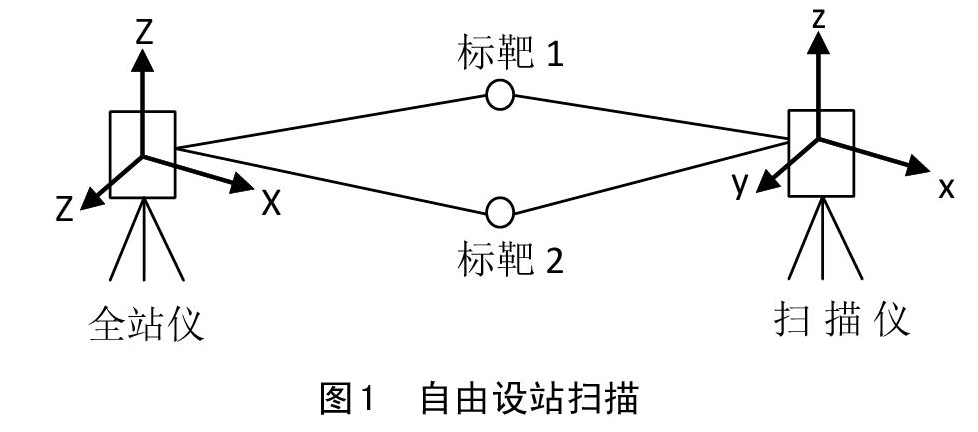
三维激光扫描仪据设站方式不同有两种类型,一种类型的三维激光扫描仪可以任意点自由设站,然后通过扫描2个或以上经全站仪测得坐标的球棱镜进行坐标转换,如图1所示。
自由设站扫描时,每一测站至少要扫描2个或以上的标靶,相邻测站扫描时宜保持上一测站标靶固定不动,标靶至扫描仪的距离不宜超过相邻测站间距的一半,标靶的坐标可以在扫描前或扫描后用全站仪测量获取。
另外一种类型的三维激光扫描仪具有类似于全站仪设站的功能,可以在已知测量控制点上置镜,通过扫描另外一个安置在已知控制点上的标靶球进行设站,如图2所示。
已知点设站扫描时,扫描仪与后视棱镜之间的距离应在扫描仪的最佳测程之内,并且后视棱镜成像清晰。
2.2点云数据采集
外业采集点云数据是三维建模的数据基础,在采集过程中,要依据操作流程严格按照数据采集规范进行。数据采集流程包括点位控制测量、扫描测站布设、球形标靶布测、点云数据扫描采集、外业数据检查分析、 数据导出备份等环节。
选择扫描仪设站位置,根据扫描仪类别,采用自由设站或已知点设站方式架设扫描仪,自由设站式扫描仪需要在现场设置2个或以上标靶球,为提高扫描精度,宜采用全站仪测量出每测站扫描的标靶球中心坐标,以提高隧道点云拼接精度,减小拼接误差积累。架设好扫描仪后,设置扫描范围、扫描密度、拍照参数,然后进行自动扫描,隧道内测站间距一般不超过30m,每测站扫描时间大约3分钟。
为保证扫描结果的精确性,三维激光扫描工作时应进行通风排烟,确保洞内无施工干扰,扫描范围内不得有施工人员、机械行走,防止遮挡扫描视线。
3、点云数据的预处理
三维激光点云在采集过程中由于受到包括仪器本身接收信号的误差、空气质量、外界施工干扰等多种因素的影响,采集的点云原始数据不能全部直接用于隧道三维模型建立和数据分析使用,为了保证后期的三维模型构建的效果及精度,在获取三维点云数据后,需要使用一些滤波算法过滤掉现场作业时背景等遮挡物的点云数据和离散点,保留目标物的主点云数据,这过程称为点云数据的预处理[4]点云预处理工作主要有点云数据配准、点云裁剪、点云去噪、点云重采样等几个方面。
3.1点云数据配准
点云数据配准,也称为点云数据拼接。三维激光扫描仪扫描隧道采集得到的点云都是以带状形式分布,每一次扫描通常由多个测站完成且每个测站都有它独立的坐标系,为使扫描成果获得统一测量坐标系下的坐标及后续进行点云数据分析、使用,需将多段点云数据叠加、拼接才能完整呈现出扫描目标的整体效果。点云的拼接方式一般采用以下几种方式:
(1)通过标靶进行拼接,作业时在相邻测站间布设两个及以上的标靶,利用同名标靶特征将相邻测站拼接在一起,自由设站式扫描采集的点云数据拼接就采用此种拼接形式。
(2)通过各测站在工程施工坐标系内的已知控制点进行定位,将各个测站点云拼接成一个整体,已知点设站式扫描采集的点云数据拼接通常应用此形式。
(3)如果作业环境中有明显可识别的特征点,可在相邻测站重复区域的点云中分别选择3个以上同名点进行拼接。
(4)基于视图同名空间特征进行自动拼接。以某一个测站点云为基准,将相邻测站点云分别进行平移、旋转、升降,将两个测站点云里的同名空间特征进行匹配。
3.2点云裁剪
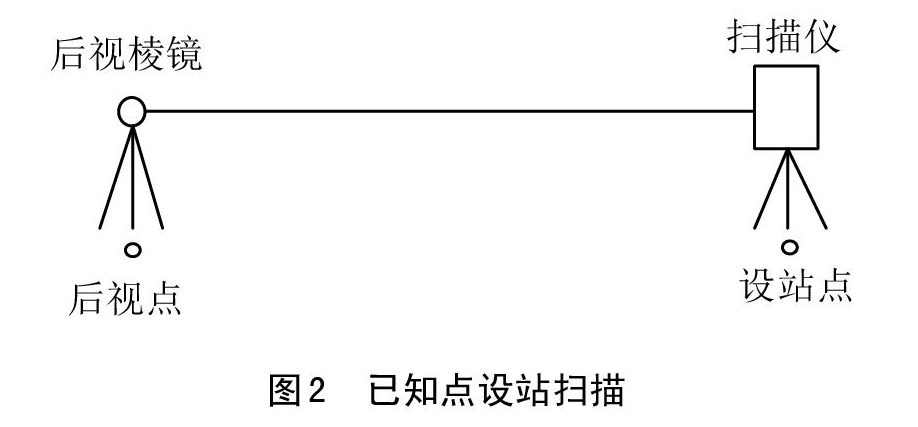
点云裁剪就是在点云满足精度条件的前提下,对部分重复区域、基本无用数据通过处理减少其数据量,只保留精度可靠、符合使用要求的有限范围内扫描点云数据,通过提取其有效信息,以达到提高数据处理运算速度、 三维建模效率以及模型必要精度的目的。隧道扫描后裁剪前的点云数据如图1所示,裁剪后的点云数据如图2所示。
3.3、点云去噪
点云数据误差的主要来源有被扫描对象表面因素产生的误差、偶然噪声点、测量系统本 身误差等[5],受其影响点云原始数据中含有各种形式的噪声点造成扫描数据不能正常、准确反映扫描目标的空间形态。隧道点云数据的不同噪声点主要有:
(1)隧道内部空间中粉尘引起的飘移点;
(2)远离隧道壁的非目标对象点,如管线、支架、凹槽点云等;
(3)超出预定扫描范围的冗余点,如有效扫描距离以外的点云。
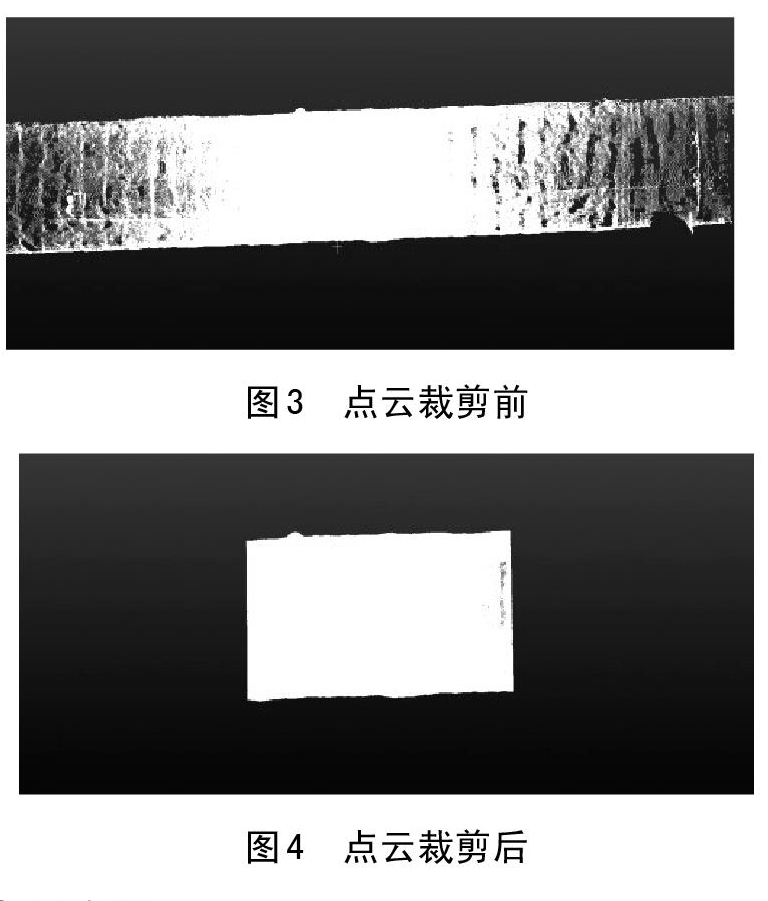
内部空间粉尘产生的飘移点,可通过滤波的方法去除,高斯滤波算法对此类噪声的过滤效果较好;对于非目标对象点云,可以采用排除法予以剔除,即通过点云聚类方法对隧道壁进行聚类,隧道壁以外的点云即为需要剔除的数据;超出预定扫描范围的冗余点可以通过点云裁剪去除。隧道洞内三维激光扫描点云去噪前如图3所示,点云明显存在施工人员、设备等噪声点,点云去噪后效果如图4所示。
3.4、点云重采样
隧道三维激光扫描获取的原始点云密度是非常大的,每平方米可以达到几十万甚至几百万个点,但在隧道点云预处理的过程中,并不需要如此高密度的点云数据来表达隧道模型。过高密度的点云不仅影像计算效率,而且占用大量存储空间。隧道超欠挖的计算中,需要对原始点云进行重采样,以提高数据的操作运算速度、 建模效率以及模型精度[6]。对点云数据重采样的抽稀方法有随机采样、点间距采样和八叉树采样等方法。隧道三维激光扫描点云抽稀前点间隔为0.02m,如图5所示,按点间距0.1m进行重采样后结果如图6所示。
结语:三维激光扫描技术通过扫描采集得到被测物体表面点云数据,结合隧道各里程断面扫描成果可建立三维影像模型,使隧道各施工环节场景重新直观再现。利用此模型和后处理软件各项辅助功能实现了隧道开挖、初期支护、二衬施工等作业环节的超欠挖计算、工程数量统计、工程质量检查及变形监测数据采集,各项成果较过去传统手段更加容易实现。数据预处理一方面为模型重建提供了精确可靠的点云数据,其次通过拼接及裁剪环节降低了模型重建复杂程度,另外经去噪和数据重采样有效提高了模型重构的精度和速度,为三维激光扫描技术在隧道施工方面更广阔的应用创造了可能。
参考文献:
[1] 宋培焱1* ,杨志敏2三维激光扫描技术在陡峭山体土石方量计算中的应用[J].城市勘测,2019(2): 63-65.
[2] 崔红超 刘仁钊 马 啸,基于三维激光扫描技术数字校园点云数据预处理[J].经纬天地,2019(04) : 40-41+46.
[3] 程俊廷1 郭博洋1 卢建军2海量三维扫描点云数据预处理方法[J].電子技术与软件工程,2018(11) : 189-190.
[4] 唐 雯1,2,基于三维激光扫描技术的数据处理及模型重建[J].山西建,2018,44(02) : 209-210.
[5]苗亚哲1,2,李胜波1,邓安仲2,乐观2,戴作球1,三维激光点云数据在既有地下人防工程 BIM 模型重建中的应用[J].测绘通,2019(06) ::100-104.
[6]杨明珠,董燕.三维激光扫描点云数据处理及建模研究[J].价值工程,2017,36(12) : 117-119.
作者简介:马自军(1971-),男,汉族,宁夏中卫人,大学本科,高级讲师。主要研究方向:工程测量及无人机、激光扫描仪等设备应用。 单位地址:兰州市西津西路511号
- 篆刻艺术在初中美术教学中的创新实践
- 贵州蜡染在贵州高中美术教育中应用问题分析研究
- 美术教学课程中学生创造力培养研究
- 构建当代美术基础教学高效课堂的基本要求
- 运用信息技术,提高美术教学实效
- 文化产业管理专业实践教学体系研究
- 应用型本科美术类技能课程考核改革的实践研究
- 书法在艺术课程教学中的重要意义
- 太原市华塔村出土的背屏式佛像造像因素分析
- 徐州美术社团沿革
- 壁画创作表现形式研究
- 传统漆画中刻漆技法的探析
- 袖珍版画
- 木刻版画艺术中的黑白语言
- 麻阳现代民间绘画分析
- 乌尔王陵竖琴板绘画的艺术价值探究
- 唐章怀太子墓《托盆景仕女》壁画探究临摹
- 当代意象水彩语言在丝网版画中的应用研究
- 史前陶器装饰概说
- 写意一族
- 刘兵作品
- 沈萌杰作品
- 秦晓玥作品
- 杜正江、郭年、黄燕进、王苗苗作品
- 徐晨曦、刘颖斌作品
- rededications
- redeed
- redeeded
- redeeding
- redeeds
- redeem
- redeemabilities
- redeemability ,redeemableness
- redeemable
- redeemablenesses
- redeemably
- redeemed
- redeeming
- redeeming feature
- redeemless
- redeems
- redefeat
- redefeated
- redefeating
- redefeats
- redefected
- redefecting
- redefection
- redefector
- redefects
- 愁恨
- 愁恼
- 愁悒
- 愁悰
- 愁悲
- 愁悴
- 愁悽
- 愁情
- 愁情如织
- 愁惕
- 愁惛
- 愁惨
- 愁惨惨
- 愁惨的样子
- 愁惴
- 愁惵
- 愁愁
- 愁感
- 愁愤
- 愁愦
- 愁慕
- 愁慵
- 愁懑
- 愁戚
- 愁戚戚