刘宇浩 孙亚培 赵亮亮 赵磊
摘?要:AGV以蓄电池为电源,双电机为动力,传感器为控制,万向轮为转向集合成一整体,从而实现无人搬运的功能。为响应应用技术型高校的建立,设计并开发了一种应用于实验室的AGV小车,以提高学生的综合实践能力,满足校内实践教学的需要。
关键词:AGV;磁敏传感器;差速驱动
1 工作环境
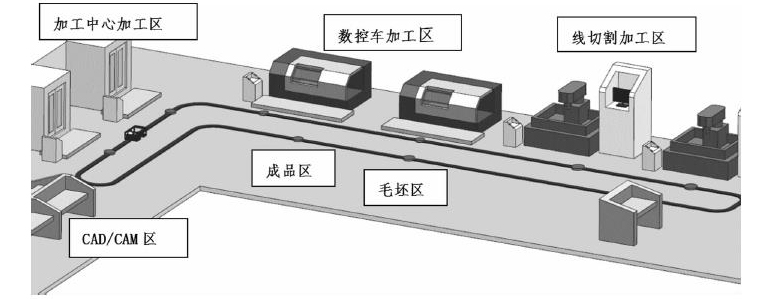
AGV交互移动机器人主要承担校内实验室的物料搬运任务,以我院2107现代制造技术实验室一为例,实验室中共有加工中心、数控车和线切割三个加工区,并设置有CAD/CAM区、成品区和毛坯区,布局如下图所示。
因AGV交互移动机器人需由磁条导引,所以地面应铺设磁条,且场地内不能有较大的磁性干扰。AGV小车由CAD/CAM区下达指令,从毛坯区开始取料,将毛坯运送至指定加工区,应完成单工序加工或多工序协同加工中的运输任务。
AGV交互移动机器人的规格大小为450mm×300mm;最大载重量20kg。
2 AGV交互移动机器人的转向寻迹运动
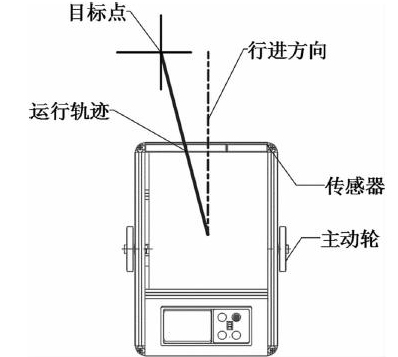
AGV交互移动机器人采用磁敏传感器进行轨迹信息采集,由单片机进行采集信息处理,辅以双电机调速方式进行行进路线的纠正。如图所示,小车行进方向为虚线所示方向,但行进目标点在左前方,小车上安装的磁敏传感器对实际磁条分布信息进行采集,并传至单片机进行处理反馈,驱使小车按实线所示轨迹行进。此时,小车左侧驱动轮减速,右侧加速,双驱动轮形成速度差。进而前后全向轮转向实现轨迹追踪,调整行进方向,完成转向寻迹动作,并行进至目标点。
3 AGV交互移动机器人的结构设计及3D建模
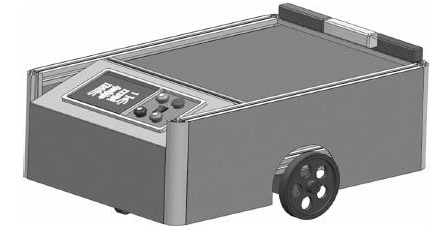
本次设计的AGV交互移动机器人主要应用于校内实验室。整车基于工业AGV为原型,结合实际需求进行改进设计。综合考虑成本及强度需求,骨架采用铝型材进行搭建。导向寻迹方式采用双电机差速原理,将双电机驱动差速结构放置于车体中间位置,在实现导向寻迹功能的同时尽可能的节省空间。为提高车身稳定性能,前后选用全向轮设计,以减小转向时车身所受阻力。为验证其实际设计效果,采用三维造型软件进行设计装配,模型如下图所示:
4 AGV交互移动机器人的模块组成
4.1 控制中心模块
控制中心模块是AGV的核心部分,在整车中如同大脑作用。用来对各种反馈信号的接受处理,以控制AGV能够正常工作。通过接收来自各个传感探头的实时信息,做出处理信号的输出,从而来控制AGV行进速度和方向,以及位置的调整。
4.2 信号采集模块
采集模块是AGV的实时信息与控制中心的交流沟通模块,在整车中相当于眼睛的作用。通过各传感探头对实时路况的感应信息采集,将AGV的所处位置情况传达至控制中心模块。例如:寻迹过程中,通过磁敏传感器对地面磁条的分布情况采集,以将采集信息传达至控制中心以做出转弯的指令判断。再如避障过程中,通过红外传感器对AGV所行轨迹上有无障碍物的情况采集,以将采集信息传达至控制中心从而做出停止或前行的指令判断。
4.3 转向、驱动模块
转向、驱动模块是AGV的各个动作指令的执行模块,在整车中相当于是四肢。通过执行从控制中心传来的指令实现转弯,前进,停止等动作。AGV交互移动机器人的转向,驱动模块主要由两个独立驱动的主动轮和两个全向轮组成。当磁敏传感器采集到转向动作信息时,将信息传输至单片机,并由单片机下达命令控制产生PWM调压信号,改变两个驱动电机电枢电压的“占空比”(接通和断开的时间比),从而改变电动机的功率和转速的大小,通过左右两边电机形成的转速差实现转向动作。
4.4 电源模块
电源模块是AGV的各项动作的主要动力来源,为整个设备提供动力。一般采用蓄电池等组件构成AGV的电源模块。
5 结论
随着科技的发展,技术的不断成熟,AGV也變的更为多样性。AGV的多环境应用,大大减少了工人的劳动强度,加强了工作的准确性,极大地提高了加工生产的效率。但是,迄今为止,AGV仍有许多难以攻克的问题,如还未完全实现自动化、无法真正脱离人为控制这一环节、存在较大的安全隐患和对运行的环境仍有较高的要求等。目前的AGV是由各母体企业自主设计研发的,虽具有较多形式种类,但普遍性不高。
因而将AGV的研究放在大学创新项目中仍有较大价值。在提升AGV的研发进度的同时,丰富高校校内实践内容,提升学生的综合实践能力。
参考文献:
[1]高毅华.AGV实践及运用.航空精密制造技术.
[2]王标,张西巍.基于AGV的动力总成工厂智能物流系统的设计.
- 基于小组合作的初中数学“问题导学”教学研究
- 小学综合实践活动不同课型的指导方法与策略
- 突破微课教学瓶颈优化小学数学教学
- 利用自主性游戏,促使幼儿主动学习
- 增强教学的活动性,让课堂充满生命活力
- 走进混龄活动促进幼儿发展
- 让书香溢满校园
- 信息时代班主任德育工作探索与实践
- 提升素养细化过程
- 课件在音乐欣赏教学中的有效应用
- 基于信息技术的小学美术欣赏教学实践探讨
- 巧用交互式电子白板优化小学英语阅读教学
- “大数据”在小学语文教育教学中的运用
- 信息技术支撑下的初中道德与法治教学模式研究
- 小学数学因“画板”更精彩
- 对财会教学的创新思考
- 中职化学抛锚式教学策略的设计原则初探
- 学习陶行知思想,构建高职英语能动型阅读课堂
- 怎样设计好一堂中职数学课
- 幼儿园主题活动中环境创设的研究
- 从《快速跑》谈提高体育课借班上课的实效性
- 小学体育教学中的创新策略探微
- 浅谈思维导图在小学英语教学中的运用
- 从“数学画”谈小学数学课上的画图策略
- 基于核心素养下的小学数学深度学习
- nonadjectively
- nonadjudicated
- nonadjudicative
- nonadjudicatively
- nonadjustable
- nonadjustably
- nonadjustment
- nonadjustments
- nonadministrant
- nonadministrative
- nonadministratively
- nonadmirer
- nonadmirers
- nonadmissibilities
- nonadmissibility
- nonadmissible
- nonadmissibleness
- nonadmissiblenesses
- nonadmissibly
- non-admission
- nonadmissions
- nonadmitted
- nonadmittedly
- nonadmitteds
- nonadopter
- 天漏雨毒
- 天演
- 天演论
- 天潢
- 天潢贵胄
- 天火
- 天灵盖
- 天灾
- 天灾之外,又加上人祸,使灾害更加严重
- 天灾人祸
- 天灾人祸一起来
- 天灾人祸后破坏得非常严重的景象
- 天灾人祸招致的损害
- 天灾人祸给人的生活、精神等造成的损伤、损害
- 天灾好躲,人祸难防
- 天灾病业
- 天炮
- 天烖
- 天热井浅
- 天热干旱
- 天然
- 天然之盾
- 天然之音自成韵律
- 天然光泽的脸色
- 天然冰箱