余先哲 韩剑 刘赛栋

摘 要:本系统设计通过单片机和传感器对车子进行自动辨别障碍物,从而判断汽车和障碍物之间的距离,从而来避免发生碰撞。智能自动拖地小车包括避障、人工操控等功能,初步的实现小车的智能化,通过几个传感器检测周圍的环境,来判断出前方是否有障碍物,再通过单片机来控制小车的运动方向,前进、转弯来对小车进行避障。在通过时间的设定完成定时拖地工作,整个系统与上位机labview开发的界面进行通信,人机界面良好。
关键词:labview;智能化;避障;检测
在工业生产和生活工作中,智能拖地小车能够根据预先设置的环境下自行进行工作、避障,不需要人为控制,就可以自行完成所要的目标。随着智能化的快速发展,智能拖地小车实现使用传感器检测路线和障碍并作出判断和相应的执行动作,智能拖地小车会让人们的生活更加多姿多彩,带来更多的方便和添加生活乐趣。
1 下位机硬件电路设计
本设计的下位机以STC89C52RC单片机为核心的控制系统,用几个设计模块相结合,用单片机主控模块,利用红外测距,进行避障功能。通过硬件电路的设计,接着软件程序的编程来实现自动拖地小车的工作。每个模块看似独立工作的,但其中各模块又能合作工作。系统控制框图如图1所示,STC89C52RC单片机是控制显示模块、电机驱动模块、避障模块、拖地模块和与上位机labview上位机通信五个大模块组成的。
2 系统软件设计
2.1下位机单片机软件程序
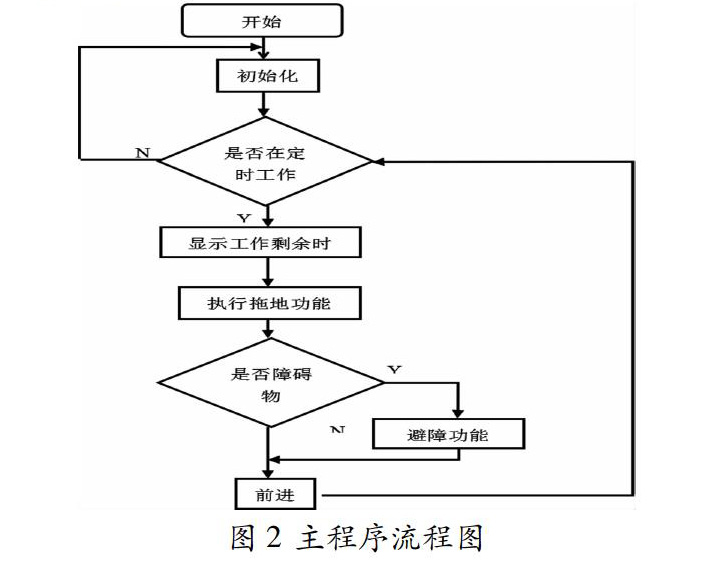
开始先对单片机和LCD1602液晶显示屏进行初始化设置,再判断是否有在定时工作,如果在定时工作范围内,就同时启动拖地装置并且通过红外探测头检测前方是否有障碍物,如果没检测到小车前进,开始循环流程,直到工作时间结束;当红外探测头检测到前方出现障碍物的时候,小车向没有障碍物的一方转弯,直到检测到没有障碍物为止,在继续执行程序的循环,直到工作时间结束如图2所示。
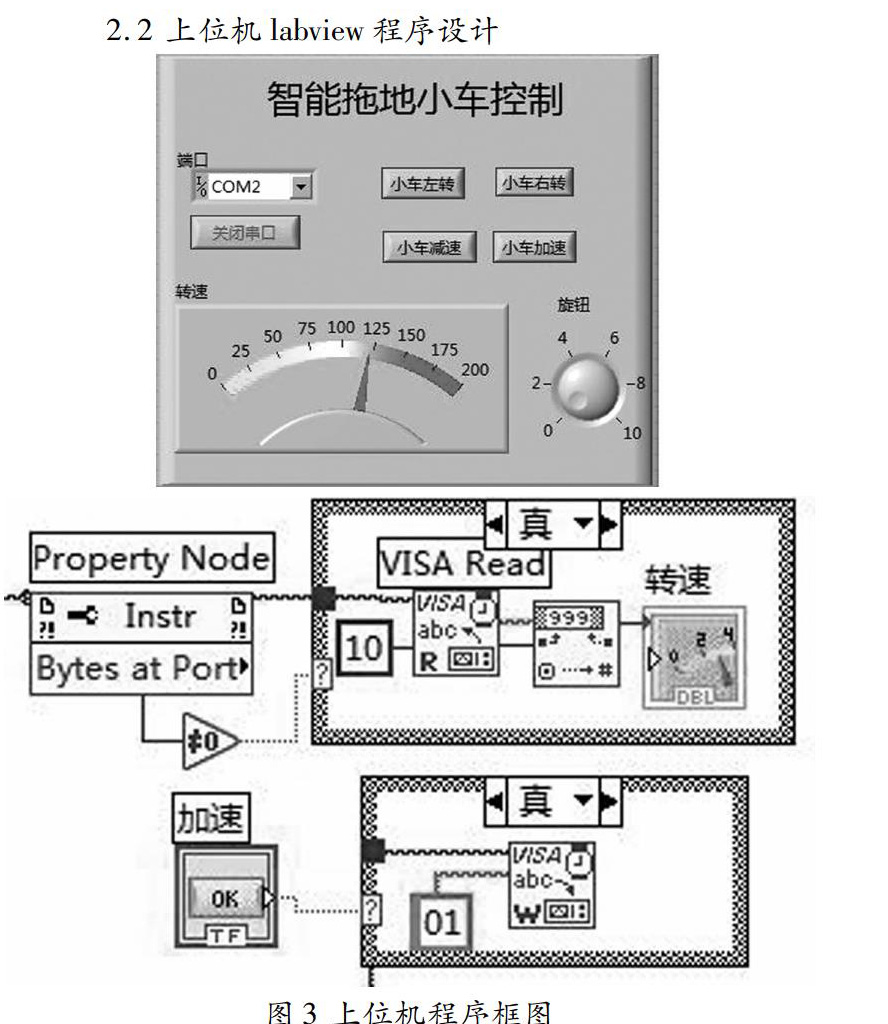
2.2 上位机labview程序设计
图3所示是基于LABVIEW的智能拖地小车系统的上位机程序,通过VISA函数使电脑上位机labview和下位机单片机进行通信,控制下位机单片机执行小车的一些操作指令。下位机进行小车速度数据采集,传输到上位机前面板上进行显示。上位机能够控制小车左转、右转、停止,开始拖地等命令功能。
参考文献:
[1]周海鹏.基于APP的智能小车控制系统设计与实现[J].现代信息科技,2018.8.
[2]李杰.基于单片机的超声波测距报警系统的设计[J].数字技术与应用,2018.9.
[3]申扣明,杨国平.基于单片机技术的自动循迹避障寻光智能小车系统设计[J].自动化应用,2018.9.
- 核心素养视角下初中数学教学策略研究
- 多媒体技术在低年级小学数学教学中的应用分析
- 基于网络背景的小学语文课堂教学优化策略分析
- 师生互动在小学语文课堂教学中的应用价值分析
- 浅谈小学音乐教学中的创新教育
- 初中音乐歌唱教学中的情感指导有效性分析
- 基于“文化转向”的小学美术信息化教学策略分析
- 浅谈如何在美术课堂上培养小学生的创造力
- 植物染料在小学美术绘画教学中的运用策略分析
- 刍议如何提高小学音乐课堂合唱教学的有效性
- 小学美术教学生态德育渗透方法探究
- 生活化教学模式在初中化学教学中的实践方式分析
- 新课改背景下初中生物教学模式的创新探索
- 初中生物教学中存在的问题及应对措施分析
- 家校合作在小学班主任管理中的应用探究
- 初中班主任专业化发展的路径探究
- 小学数学低年级计算能力的培养策略分析
- 小学数学错题集的创建与应用探索
- 利用信息技术提升小学生数学核心素养办法探究
- 浅析高中阶段函数学习中的几个常见错误
- 数学课堂中教师“追问”的策略探究
- 优化课堂激发学习
- 小学数学教学中核心素养生成的方法探讨
- 小学数学课堂情境创设存在的问题及策略分析
- 小学数学教学中落实核心素养培养工作的路径探究
- non-reusable
- nonreusables
- non-revealing
- nonrevealing
- nonrevelation
- nonrevelations
- nonrevenge
- nonrevenger
- nonrevengers
- nonrevenges
- non-revenue
- nonrevenue
- nonrevenues
- nonreverence
- nonreverences
- nonreverent
- nonreverently
- nonreverse
- nonreversed
- nonreverses
- nonreversibilities
- nonreversibility
- nonreversible
- nonreversibleness
- nonreversiblenesses
- 鸡儿不撒尿——自有门道
- 鸡儿不撒尿——自然有一便
- 鸡儿不撒尿, 各自有出处。
- 鸡儿吃了过年粮
- 鸡儿命——刨闹一天吃一天
- 鸡儿嗉子老鼠眼——吃的不多,看的不远
- 鸡儿的嗉子——装不多
- 鸡儿赶弹儿
- 鸡兔不同笼
- 鸡公
- 鸡公头上的肉
- 鸡公头上的肉——大小是个冠
- 鸡公头上的肉——大小是个冠(官)
- 鸡公屙屎——头节硬
- 鸡公戴帽子——冠(官)上加冠(官)
- 鸡公的尾巴——翘得高
- 鸡内脏炒成的菜
- 鸡内金
- 鸡冠
- 鸡冠子油
- 鸡冠秀才
- 鸡冠花
- 鸡初喔
- 鸡刨一爪吃一嘴
- 鸡刨一爪,吃一嘴