凌远坤 仲志丹 李栋 金容鑫 姚晨辉 王继茂
摘?要:本文对基于机器视觉的图像识别及处理提供了通用思路。基于OpenCV库所提供的算法进行识别乒乓球。在机器视觉和图像处理领域,处理方法的选择和其处理顺序将直接影响机器视觉的准确性和稳定性。对一些常用的机器视觉识别处理方法进行了简单介绍。
关键词:OpenCV;颜色过滤;边缘检测;霍夫变换;HSV
1 绪论
机器视觉是人工智能正在快速发展的一个分支。通俗地讲,机器视觉就是用机器代替人眼来做测量和判断。机器视觉系统是通过摄像头等图像采集装置将被摄取目标转换成图像信号,通过对图像的像素特征进行处理运算得到目标的特征进而根据结果来进行下一步操作。生产生活中人们对智能化产品的需求日益剧增,机器视觉作为人工智能不可或缺的一个分支,具有非常重要的研究价值。
2 图片模糊
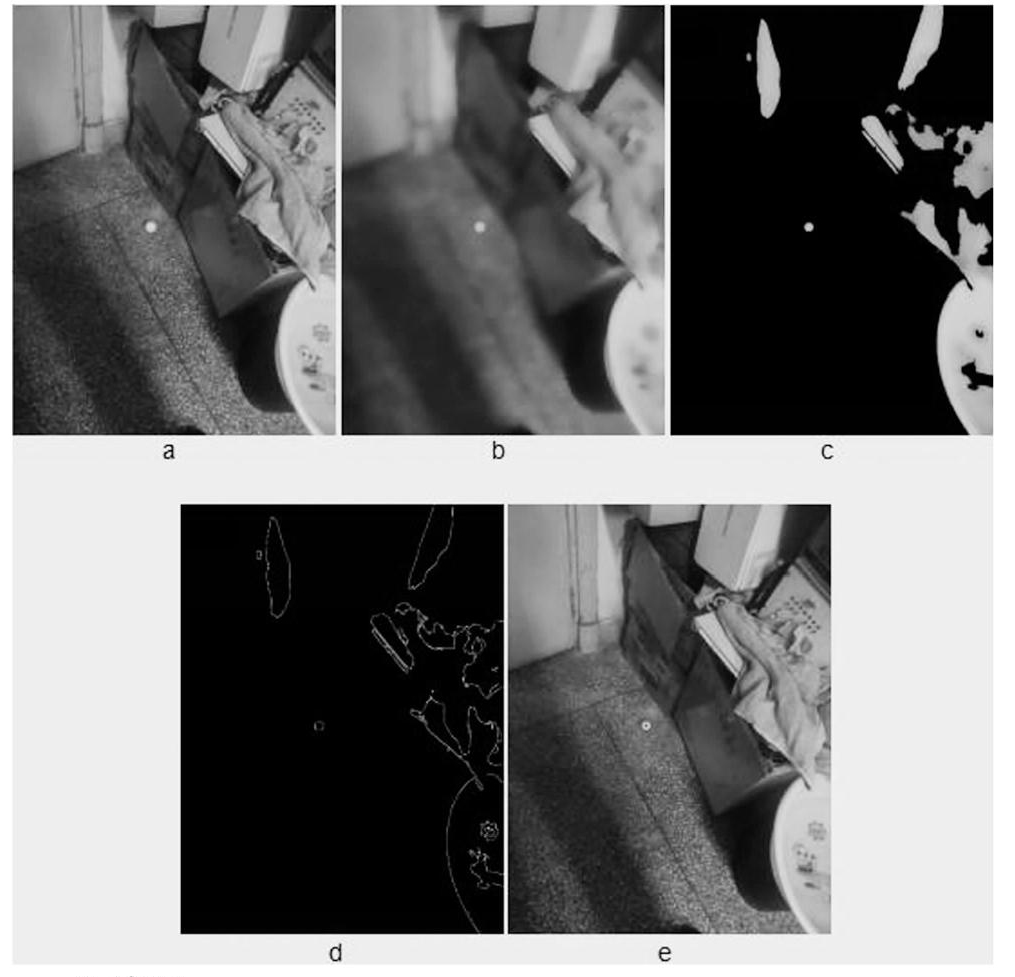
模糊操作时图像处理中最简单和常用的操作之一,使用该操作的原因之一是给图像减低噪声。图片模糊包括均值滤波、中值滤波、高斯滤波、双边滤波等。本次采用的滤波器是双边滤波。对原图(a)进行双边滤波处理效果如图(b)。双边滤波器比高斯滤波器多了一个高斯方差Σ-d,它是基于空间分布的高斯滤波函数,所以在边缘附近,离的较远的像素不会太多影响到边缘上的像素,这样就能对边缘附近的像素值予以保存,但是由于保存过多的高频信息,对于彩色图像里的高频噪声,双边滤波器不能够干净的滤掉,只能够对于低频信息进行较好的滤除。
3 不同颜色空间下的颜色过滤
RGB系统是从电子显示器角度出发,通过发射三种不同强度的电子束使屏幕残剩色彩,而HSV则是从人类对色彩的定义出发,从色调,饱和度和亮度三方面区分颜色。RGB系统能很好地吻合人眼强烈感知红,绿,蓝三原色的颜色,并且对硬件实施也很理想,但它却无法很好地适应人类实际上解释的颜色,因为我们并不认为彩色图像是由三原色图像混合形成的,一般过滤颜色不只是过滤单一的客观颜色,而是一类颜色,RGB中想要过滤这一类颜色需要确定三原色的取值,而HSV模型是一种直观的颜色模型,过滤时只需要设定H的阈值即可,因此这里我们选用HSV颜色模型进行颜色过滤。对经过模糊之后的图(b)处理效果如图(c)。
4 边缘检测
我们人眼通过边缘来判断不同物体之间的界线。边缘检测作为机器视觉中重要的一部分具有很多的应用。机器视觉中大量使用一阶微分和二阶微分来实现边缘检测。通过推断,我们得到以下结论:(1)一阶微分会产生较二阶微分“粗”的边缘;(2)二阶微分对细节,如细线、孤立点有较强的响应幅度;(3)二阶微分在灰度斜坡和灰度台阶过渡处会产生双边缘响应;(4)二阶微分的符号可以用于确定边缘的过渡是从亮到暗还是从暗到亮。[1]这里我们采用双阈值操作的Canny边缘检测,对颜色过滤之后的图(c)处理效果如图(d)。
5 霍夫(Hough)变换
霍夫变换是基于坐标变换产生的一种检测简单几何形状的方法,在二值图像中使用此方法可以较为快速检测到简单的几何形状,如线、圆等。
5.1 霍夫线变换
霍夫线变换的基本推理为假定已知一幅图像中的n个点,且这些点中有若干点位于不同直线上。首先取其中一条直线,利用斜截式方程将直线参数化,设定斜率为k,截距为b,直线方程可以表达为y=kx+b。而后利用坐标变换,将直线表达式转换为以k为纵坐标,b为橫坐标的表达式,即b=-xk+y,转换后的坐标系称为霍夫空间。通过这样的转换,不仅可以将原先直角坐标系的直线就转变成为了霍夫空间中所对应的点,而且可以将原先坐标系中的点转化为霍夫空间中的直线。直角坐标转换存在缺陷。因为斜截式方程的缘故,对于斜率无穷大或者无穷小的直线,这种转化就会变得颇为难以计算。因此,可以采用另一种变换方式即极坐标变换,通过这种方式就可以将直角坐标系中的点以霍夫空间中的线表达出来,最后将(ρ,θ)坐标系进行细化,细化的程度决定了共线精度,对各个线的交点对应的坐标取整后进行累加,找到局部数值最大的点就是直角坐标系中所求的直线。
5.2 霍夫圆变换
霍夫圆变换的推理与霍夫线变换的方法类似,不同之处在于圆变换所需三个参数,分别为圆心位置x,y和圆的半径r,累加过程就要从累加平面转化为累加立体的体积。但这就意味着圆变换必线变换需要更大的内存和计算量,而在OpenCV中通过采用霍夫梯度法防止此类问题的出现。这里我们对边缘处理之后的图(d)进行霍夫圆变换,并且用红色圆圈在原图中标出圆形所在位置,处理效果如图(e)。
6 结语
测试结果如上图所示,这表明,本文设计的基于OpenCV的自动识别乒乓球系统,能够检测和识别到乒乓球及无线传输现场图像,对开发捡球机器人具有较好的价值。设计时采用了OpenCV库函数,减少了开发周期,起到了事倍功半的效果,而且对从事图像的和机器人视觉研究很有帮助。
参考文献:
[1]拉斐尔·C·冈萨雷斯,查理德·E·伍兹.数字图像处理(第三版)[M].电子工业出版社,2017:447.
- 设置线性磁流变可控阻尼框架结构的半主动控制分析
- 基于Vector工具链车载总线自动化测试系统研究
- 基于X、Y细胞感受野视觉神经机制的轮廓检测模型
- 改进萤火虫算法在投资组合问题决策中的应用
- 基于BIM技术的装配式混凝土结构的安全管理
- 机制砂尾料磨细掺合混凝土的性能研究
- 风荷载作用下屋顶槽式聚光镜对建筑顶层结构的影响
- 改良土壤的渗透性能
- 卷积型非粘滞阻尼结构随机地震动系列响应求解的虚拟激励法
- 单像素相机内部元素对重构矩阵性能的影响
- 某牵引车电池损坏机理试验分析与解决
- 高温固相法制备Li7La3Zr2O12固态电解质及其性能研究
- 基于Viola-Jones 框架人脸检测算法的汽车疲劳驾驶检测
- 建筑物晃动引起的电梯提升系统纵向-横向耦合振动分析
- 基于STM32的方波信号发生器的设计与检测
- 基于HOG特征与SVM的视频车辆检测系统设计
- 落地生根冻干粉对人癌细胞增殖和细胞凋亡的影响
- 亥姆霍兹自振空化装置流场特性的数值模拟
- 中国建设银行盈利能力可持续性分析
- 多壁碳纳米管修饰玻碳电极电致化学发光测
- 抗坏血酸在石墨烯/β-环糊精复合材料修饰电极上电化学行为及其测定
- 基于某新能源车后排安全带固定点强度的车身局部结构优化
- 基于模糊PID下肢外骨骼机器人的控制技术
- 中国与其他创新型国家基础研究经费投入政策对比研究
- 广西高技术产业科技创新能力评价研究
- postpulmonary
- post-punk
- postrace
- postrecession
- postrectal
- postredemption
- postredemptions
- postreduction
- post-reformation
- post-reformations
- post-renaissance
- postrenal
- post-reproductive
- post-restoration
- post-restorations
- postresurrection
- postresurrectional
- postresurrections
- postretirement
- postrevolution
- postrevolutionary
- post-revolutionary
- postriot
- post-roman
- post-romantic
- 回肠九转
- 回肠伤气
- 回肠宛转
- 回肠寸断
- 回肠百结
- 回肠百转
- 回肠结气
- 回肠荡
- 回肠荡气
- 回腰
- 回舆
- 回舒
- 回舞
- 回舟
- 回航
- 回舮
- 回舲
- 回船
- 回船转舵
- 回船转舸
- 回茬
- 回荡
- 回萦
- 回落
- 回薄