罗黎明

摘 要:传感器和执行器复杂的磁滞特性导致了输出、输入变量之间的非线性和多值映射。针对这种复杂的磁滞非线性,本文基于改良的Prandtl-Islinskii方法对其进行建模和补偿。实验结果验证了这种新的建模和补偿方法可以有效解决执行器中的磁滞非线性问题。
关键词:执行器;磁滞非线性;Prandtl-Ishlinskii算子;非线性误差
由于硅在传统机械材料的加工领域中取得了显著的进展,因此微机电系统的应用越来越广泛。微型化是作为微机电系统技术的主要特征之一,它除了要求传感器要小型化外,还要求执行器具有较高的能量密度,这可以让执行器在尺寸很小的情况下获得足够大的力[1]。但是,在控制过程中执行器与传感器之间存在复杂的磁滞非线性,这就导致了执行器的输出变量和输入变量之间存在非线性和多值映射[2]。
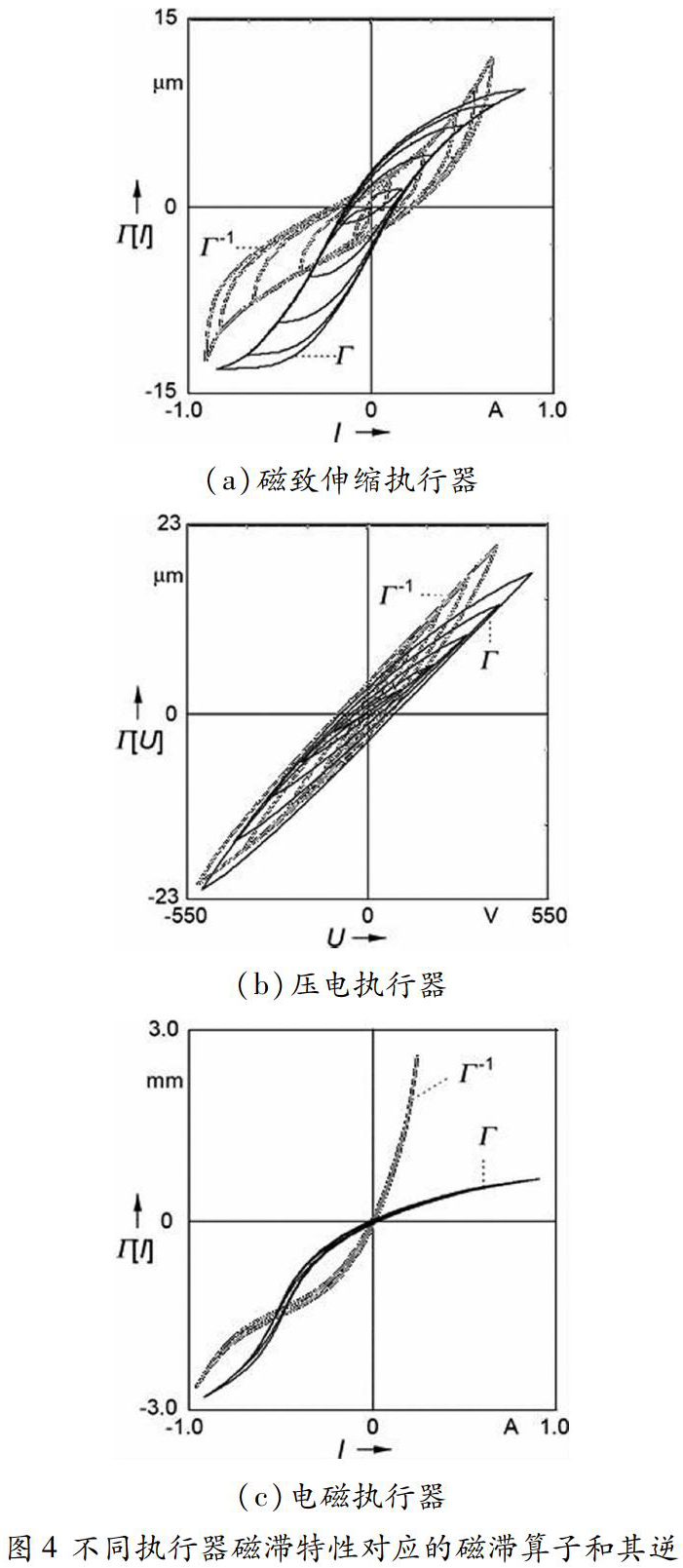
磁致伸缩执行器,压电执行器和电磁执行器的磁滞特性如图1所示,图中s为位移,U为电压,I为电流。从图中可以看出每个执行器相应的输入变量和输出变量之间都存在非线性和多值映射的关系,并且各个执行器之间的磁滞特性还各不相同[3]。对于这种复杂的磁滞非线性,本文采取改良的Prandtl-Ishlinskii方法进行非线性的建模和补偿器的设计,并且通过实验证明这种新的建模和补偿方法能够解决执行器中复杂的磁滞非线性。
1 建模和补偿
在数学中,常把磁滞非线性的表示方法等同于“速率独立记忆效应”。这意味着具有滞后性系统的输出信号不仅取决于输入信号的现值,还取决于它们的振幅顺序,特别是它们的极值,但是不取决于它们过去的速率。图1所示的与速率无关的分支转移特性是具有滞后非线性的典型标志,其可以分为两类。在第一类中,磁滞非线性具有局部存储结构,这意味着输出的当前值仅取决于输入的当前值和一个极值。但是,几乎所有基于智能材料的传感器和执行器中出现的磁滞非线性都具有非局部或复杂的存储结构,因此他们都属于第二类情况。在这种情况下,输出的当前值不仅取决于输入的当前值,而且还取决于过去输入的一个或多个极值[4]。这种复杂的存储结构可能会使得闭合的主循环和次循环在输入信号相同方向的分支处相交。
对执行器中出现的复杂磁滞非线性问题,起初主要采用Prisach滞后算子其进行建模和补偿,并采用逆前馈控制的方法。但使用Prisach滞后算子的主要缺点是一般情况下Prisach滞后算子的补偿器需要进行数值计算,不适合实时应用。因此,最近的研究也提到了采用Prandtl-Ishlinskii滞后算子对非线性问题进行建模和补偿。在初始状况下:
对于初始时间为t0的输出信号,滯后算子与输出的独立初始值y0∈R有关,并由其阈值参数rH∈R+0来表征。图2显示了该滞后算子不受速率影响的输出-输入轨迹。
Prandtl-Ishlinskii滞后算子的阈值离散形式为:
与Preisach滞后算子相比,使用Prandtl-Ishlinskii滞后算子的主要优点是,Prandtl-Ishlinskii滞后算子的模型复杂度降低[5],并且可逆的Prandtl-Ishlinskii滞后补偿器也为Prandtl-Ishlinskii滞后算子类型,这意味着可以利用权重、阈值和初始状态转换规律进行分析计算。但是使用Prandtl-Ishlinskii进行建模有一个最主要的缺点,是对实际复杂执行器的磁滞非线性往往存在着很强的限制。
克服这些限制的一个直观想法是将滞后算子与连续的、非凸的以及非对称的无记忆非线性环节串联在一起[7]。这就引出了改进的Prandtl-Ishlinskii方法,该方法使用了一种特殊的无内存非线性建模技术。改进的Prandtl-Ishlinskii磁滞算子由Prandtl-Ishlinskii滞后算子和Prandtl-Ishlinskii叠加算子组成[6]。Prandtl-Ishlinskii叠加算子是基于函数定义的所谓单侧死区算子的加权叠加。
在相应输出信号和输入信号的现值之间,这个叠加算子也完全由阈值参数rS∈R来描述。图3显示了该叠加算子在不同阈值下与速率无关的输出-输入轨迹。
Prandtl-Ishlinskii叠加算子的阈值离散形式为:
对于Prandtl-Ishlinskii的滞后算子H和叠加算子S[6],改进后的Prandtl-Ishlinskii磁滞算子由以下公式定义:
因此,改进的Prandtl-Ishlinskii方法允许对具有非对称回路的可逆复杂滞后非线性进行一致的建模和补偿。
2 实验仿真分析
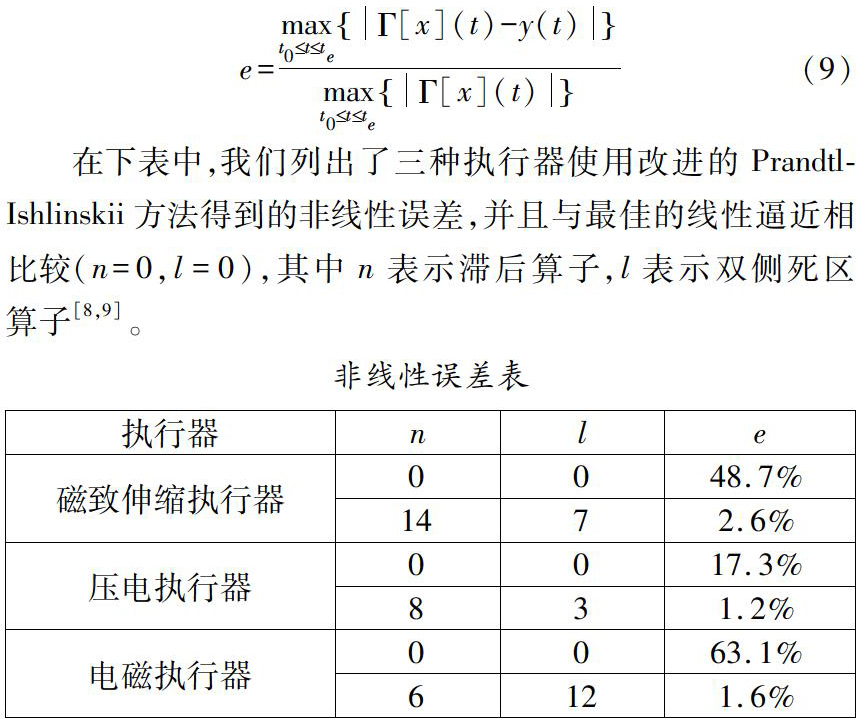
在本节中,将通过补偿图1中3种执行器的非线性来验证改进后Prandtl-Ishlinskii方法的性能。例如,图1(b)中压电执行器的磁滞特性显示出很强的磁滞分支,并且从奇对称到原点的偏差很小。在这种情况下,可以使用带有8个滞后算子和6个单边死区算子的改进后的Prandtl-Islinskii磁滞算子,来很好地补偿压电执行器的非线性。但是,图1(c)中的电磁执行器的磁滞特性显示出较弱的磁滞分支,并且从奇对称性到原点的偏差很大。在这种情况下,可以使用具有6个滞后算子和24个单侧死区算子的改进的Prandtl-Ishlinskii磁滞算子,来补偿电磁执行器的非线性。最后,图1(a)中磁致伸缩执行器的磁滞特性显示出很强的磁滞分支以及从奇对称到原点的强烈偏差。在这种情况下,可以使用具有14个滞后算子和14个单侧死区算子的改进的Prandtl-Ishlinskii磁滞算子,来补偿磁致伸缩执行器的非线性。
在图4中,改进的Prandtl-Ishlinskii磁滞算子的分支显示为黑线,相应的精确逆算子显示为灰线,它们是执行器的磁滞特性来确定。我们定义的执行器非线性误差e可以通过下面公式计算。
在下表中,我们列出了三种执行器使用改进的Prandtl-Ishlinskii方法得到的非线性误差,并且与最佳的线性逼近相比较(n=0,l=0),其中n表示滞后算子,l表示双侧死区算子[8,9]。
与最佳的线性逼近相比,使用改进后的Prandt-Islinskii方法可以将磁致伸缩执行器的非线性误差降低约20倍,压电执行器的降低约15倍,电磁执行器的降低约40倍。
3 总结
本文证明了利用改进的Prandtl-Ishlinskii方法可以对磁致伸缩执行器,压电执行器和电磁执行器的复杂磁滞非线性问题进行建模和补偿。在磁滞特性不同的情况下,非线性误差至少可以减少约15倍,这使得上述3种执行器的非线性问题能够很好地解决。
参考文献:
[1]程时杰.先进电工材料进展[J].中国电机工程学报,2017(15).
[2]冯颖,胡跃明,苏春翌.基于Prandtl-Ishlinskii模型的一类回滞非线性系统自适应控制[J].自动化学报,2006(03).
[3]顾寒烈,吴洪涛,杨小龙,李耀,程世利.压电作动器非对称迟滞模型的建立和参数辨识[J].仪器仪表学报,2017(04).
[4]周洪成.数据驱动无模型自适应控制技术研究[D].南京航空航天大学,2017.
[5]胡兰雄.精密磁阻作动器磁滞建模与控制研究[D].华中科技大学,2018.
[6]徐鸿翔.伺服阀用超磁致伸缩电-机转换器控制技术的研究[D].南京航空航天大学,2013.
[7]席守治,赖磊捷.基于正切函数的压电驱动磁滞建模及其控制[J].轻工机械,2020(05).
[8]李俊志,关杰,孙文龙.一种改进的线性化技术及其应用[J].密码学报,2014(05).
[9]李凯.一类二次函数的最佳一致线性逼近的思想方法及其应用[J].中学数学研究(华南师范大学版),2018(19).
- 以实验器材为中心的复习课教学策略
- 解题后的思考
- 实验教学中的数据处理
- 解读近十年广东省中考试题 谈实验综合题备考策略
- 由一道动态电路题中物理量变化规律谈起
- “杠杆及其平衡条件”命题类型及应试策略
- 动脉血与静脉血相互转化的演示方法
- 串联兴奋点 进阶新课堂
- 基于核心素养的初中化学学业水平考试命题分析及思考
- 关注基础 注重能力 凸显素养
- 基于解法探究 揭示图形内部结构
- 辨识全等与旋转 方知旋转有奇效
- 例析动态几何中的正方形变换问题
- 对一道中考试题的多解
- 关注模型与运算 体悟数学思想提升数学素养
- 从“中考原创试题”看“用”教材的三重境界
- 科学实施分层教学 有效发展学生个性
- 学习进阶视域下的科学核心概念教学
- 基于三类实例建构“机械功”概念的尝试与思考
- 也谈滑动变阻器接入方法的比较
- 当完美正方形偶遇美丽的45度角
- 赏析多元解法 优化教学理念
- 奇异组及其求解
- 探讨线段数量关系的解题策略
- 创造性地使用教材培养学生的数学思维能力
- nonimperialistically
- nonimplement
- nonimplemental
- nonimplements
- nonimplication
- nonimplications
- nonimport
- non-importation
- mortgage²
- mortgage¹
- mortgaging
- mortgagor
- mortice
- morticed
- mortices
- mortician
- morticians
- morticing
- mortification
- mortified
- mortifier
- mortifiers
- mortifies
- mortify
- mortifying
- 坍塌毁坏
- 坍塌的城墙
- 坍塌的墙
- 坍塌的屋脊
- 坍塌的样子
- 坍塌窒塞
- 坍方
- 坍毁
- 坍毁破败
- 坍缩
- 坍颓
- 坎
- 坎上愁帽
- 坎井
- 坎井之蛙
- 坎井之识
- 坎伐檀
- 坎儿
- 坎儿井
- 坎土曼
- 坎坎
- 坎坎伐檀
- 坎坷
- 坎坷一生
- 坎坷不平