赵洪坤 窦忠宇 龙成万
摘 要:本文针对全方位轮式移动机器人的轨迹跟踪问题提出一种“模糊自整定的微分先行PD”的控制方法,并建立运动学控制模型,进行模糊微分先行PD算法控制器的设计,最后在MATLAB/Simulink中进行仿真。仿真结果表明,基于模糊微分先行PD算法对机器人轨迹跟踪控制是有效的。
关键词:移动机器人;模糊控制;轨迹跟踪
中图分类号:TP242文献标识码:A文章编号:1003-5168(2018)32-0026-03
Tracking Control of Mobile Robot Based on Fuzzy Differential
Advanced PD Algorithms
ZHAO Hongkun DOU Zhongyu LONG Chengwan
(Anshun College,Anshun Guizhou 561000)
Abstract: Aiming at the trajectory tracking problem of omnidirectional wheeled mobile robot, this paper presented a control method of "fuzzy self-tuning differential advance PD", established a kinematics control model, designed the controller of fuzzy differential advance PD algorithm, and finally simulated it in MATLAB/Simulink. The simulation results showed that the trajectory tracking control based on fuzzy differential prior PD algorithm was effective.
Keywords: mobile robot;fuzzy control;trajectory tracking
目前,机器人技术已广泛应用于电力行业,如核电站作业机器人、高压带电作业机器人、除冰机器人、高压输电线路巡检机器人及变电站巡检机器人等[1]。对于机器人的轨迹跟踪控制,已有很多学者进行研究。张强[2]等使用多组位置式自适应PID控制策略;张翔洲[3]等把灰色PID算法用于巡检转向控制;祖丽楠[4]等应用模糊自适应的位置型PID控制算法;王靖[5]等提出了一种模糊LoS(Line-of-Sight)与PID控制相结合的方法。本文对所建立的全方位轮式移动平台进行运动学建模并进行运动分析,设计一种移动机器人的模糊微分先行PD轨迹跟踪控制策略。
1 运动学模型
移动机器人采用Mecanum全方位轮,通常采用多个(常用3个或4个)Mecanum轮以一定的方式进行组合,实现全方位移动的能力。在进行运动学建模前,首先作出
以下假设:①整个巡检机器人被视为刚体,忽略悬挂系统及其他造成巡检机器人尺寸改变的情况;②运动过程中地面平整,Mecanum轮与地面接触良好,不存在车轮与地面脱离的情况;③Mecanum轮与地面接触时辊子不存在打滑现象。四轮机器人移动平台坐标系如图1所示,令[vx]、[vy]、[ω]为机器人的平动速度和转动速度。4个Mecanum轮的角速度为[θ1.]、[θ2.]、[θ3.]、[θ4.],转速为[VL1]、[VL2]、[VL3]、[VL4],四轮轴心的运动速度为[V1]、[V2]、[V3]、[V4],小辊子的转速为[Vg1]、[Vg2]、[Vg3]、[Vg4],[l1]和[l2]为全方位轮轴心到X轴和Y轴的距离,R为Mecanum轮的轮体半径。
系统中所研究的独立变量为[θi.],进行系统解算可以得到机器人的正向运动学方程[6]为:
[vxvyω=R4? ? ? ? 1? ? ? ? ? ? ? ?1? ? ? ? ? ? ? ? ? 1? ? ? ? ? ? ? ? 1? ? ?-1? ? ? ? ? ? ? ?1? ? ? ? ? ? ? ? ? 1? ? ? ? ? ? ?-1-1l1+l2? ?1l1+l2? ?-1l1+l2? ?1l1+l2×θ1θ2θ3θ4](1)
假設巡检机器人不打滑,利用广义逆,求得逆向运动学方程为:
[θ1θ2θ3θ4=1R1? ?-1? ?-l1+l21? ? ?1? ? ? ? l1+l21? ? ?1? ? ? ? l1+l21? ?-1? ? ? -l1+l2]? ? ? ? ? ? ? ? ? ?(2)
2 轨迹跟踪控制策略
在深入研究现有文献的基础上,本文提出一种“模糊自整定的微分先行PD”控制器,用于机器人轨迹跟踪控制。由传统PD控制的离散表达式[见式(3)]可知,在控制器参数已经设定好的情况下,其微分控制量大小取决于ec的大小,计算公式如式(4)所示。
[uk=kp·ek+kd·ek-ek-1]? ? ? ? ? ? ? (3)
[ec=ek-ek-1=rk-ck-rk-1-ck-1=rk-rk-1-ck-ck-1]? ? ? ? ? ? ? ?(4)
微分先行策略及其控制性能在PID控制领域的文献中多有介绍,其中心思想就是用[ec]的值,利用[ck-1-ck]来求,而不是用[ek-ek-1]。对于巡检机器人的X轴调整过程来说,[ck-1-ck]正比于机器人在X轴方向上的速度分量。微分先行PD控制器如图2所示,其与传统PD控制器在结构上的区别是含有2个输入信号,微分环节来自于被控对象的输出,而不是偏差信号。另外,对巡检机器人的车头方向的控制,可以通过陀螺仪直接检测角速度,那么在巡检机器人调头过程中的自转的微分就无需PD控制器来求取,直接读传感器即可获得。
模糊控制常被用来实时调整PID控制器的参数,模糊控制器以偏差e和偏差变化ec作为输入,经模糊化、模糊推理、解模糊三步运算,得出[kp]、[ki]、[kd]的变化增量,使PID控制器的参数能根据环境变化实现实时自调整,可进一步增强PID控制器的控制性能。把模糊控制融入微分先行PD控制算法中,即可得到模糊自整定的微分先行PD控制器,如图3所示。利用MATLAB提供的模糊工具箱可以方便制作出自己的模糊控制器(Fuzzy Controller),采用三角隶属度函数对输入变量进行模糊化运算,并进行模糊规则表的制作,有诸多现有文献可以参考[7]。
解模糊采用重心法。对于巡检机器人X轴、Y轴和自转的三个PD控制中,所设计的模糊控制器的输入e和ec区间并不都完全匹配这三个PD控制器,通过乘以一个比例环节和限幅环节可以保证把三个控制器的e和ec区间限定在[-1,1]中。
3 基于MATLAB/Simulink的控制模型仿真与结果
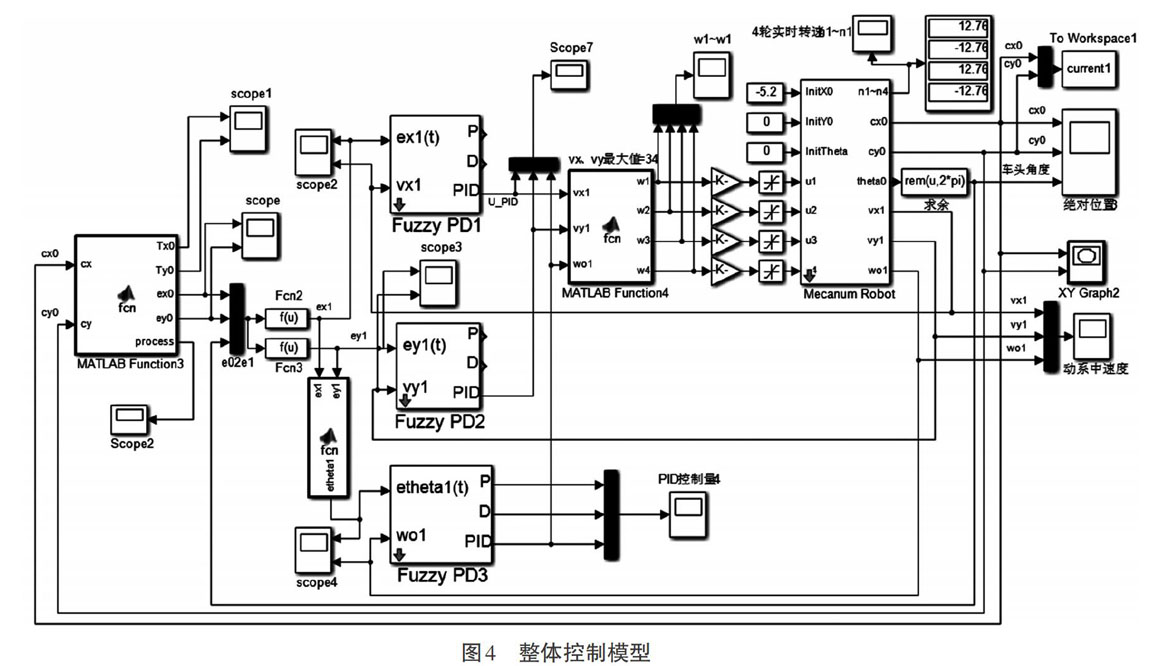
基于“模糊自整定的微分先行PD”控制器的控制系統结构如图4所示。
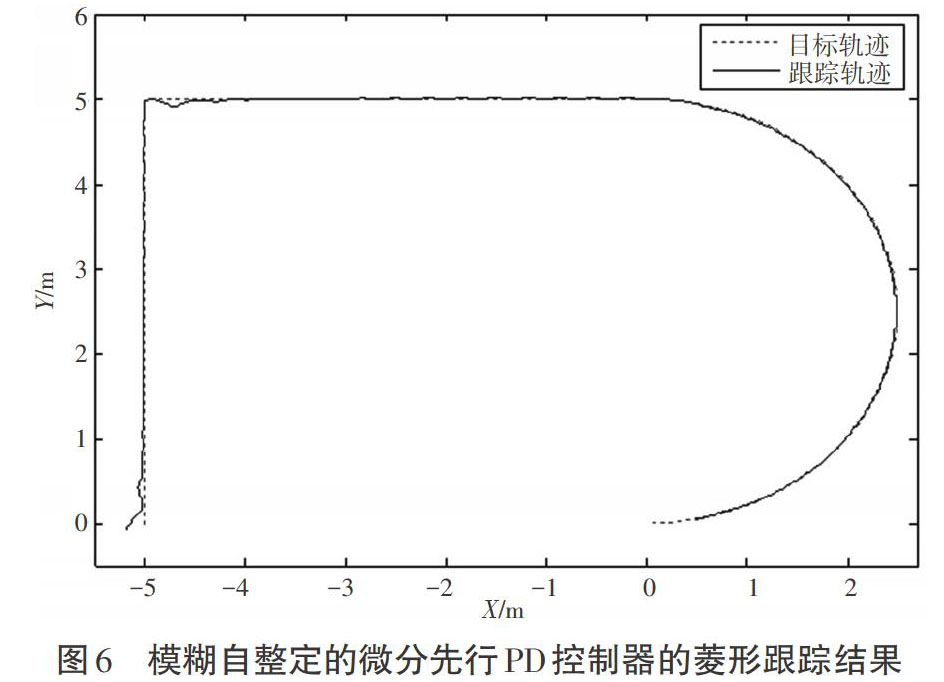
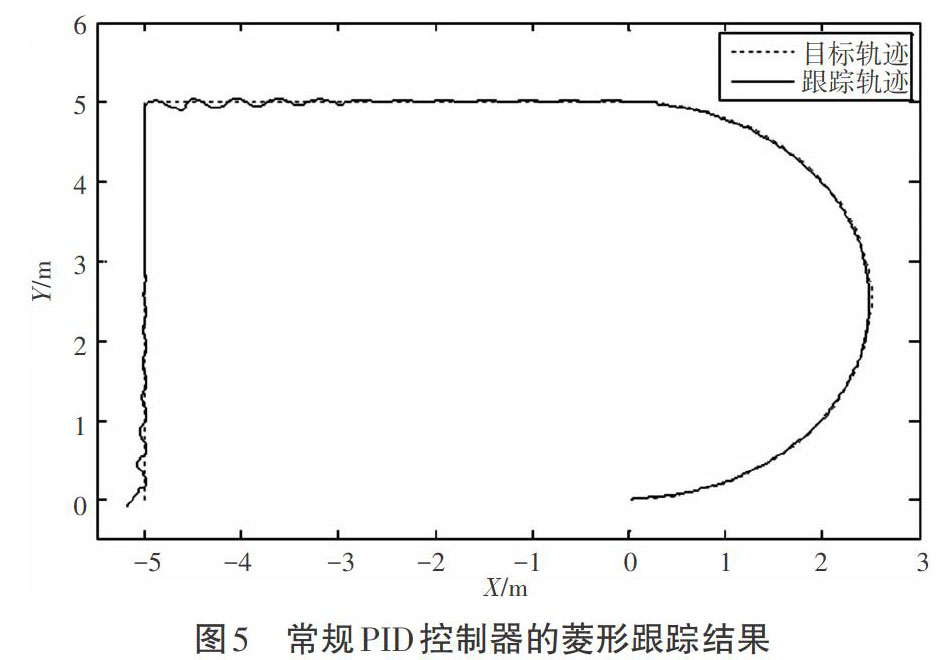
移动机器人运动轨迹一般包含直线、拐角、弧线等三种要素,故仿真所使用的目标轨迹为一个直角弯加一个半圆弧,这种路径囊括了上述三种要素,具有代表性。接下来,对比分析巡检机器人在“常规PID控制”和“模糊自整定的微分先行PD控制”下的跟踪情况。常规PID控制器的轨迹和模糊自整定的微分先行PD控制器的轨迹跟踪情况如图5和图6所示。
采用传统PID控制的机器人在拐角后容易发生蛇形现象,机器人经过直线运动后速度较快,转角之后由于惯性作用需要经过较长时间的调整才能稳定下来。采用模
糊自整定的微分先行PD控制器与使用常规PID控制下的轨迹跟踪情况(见图5)相比,其行进过程中的波动情况大为减轻,整体运动控制效果较好。这主要是因为在模糊控制器的作用下,[kp]有所减小使车速有所下降,以避免超调;[kd]有所增大,以增强阻尼作用,减缓波动。
4 结语
本文针对全方位轮式移动机器人的轨迹跟踪问题提出一种“模糊自整定的微分先行PD”的控制方法,并建立运动学控制模型,进行模糊微分先行PD算法控制器的设计,最后在MATLAB/Simulink中进行仿真,并与传统PID控制进行对比。结果表明:在模糊控制器的作用下,提高了系统的动态性能,运动控制轨迹更加精确,为该算法的实际应用奠定了基础。
参考文献:
[1]谢伟杰.智能巡检系统在变电站中的应用[J].黑龙江科技信息,2014(25):80.
[2]张强.轮式巡检机器人导航控制算法研究与实验平台设计[D].天津:河北工业大学,2014.
[3]张翔洲.变电站巡检车运动控制系统的研究[D].西安:西安工业大学,2015.
[4]祖丽楠,张强,梁静,等.变电站巡检机器人导航方法研究[J].科学技术与工程,2014(9):198-201.
[5]王靖.拖挂式移动机器人路径跟踪控制[D].济南:济南大学,2010.
[6]王冠.全方位移动平台运动控制技术研究[D].北京:北京理工大学,2015.
[7]刘国荣,张扬名.移动机器人轨迹跟踪的模糊PID-P型迭代学习控制[J].电子学报,2013(8):1536-1541.
- 民营上市公司经理人持股与经营绩效的关系研究
- 慈善捐赠对企业绩效的影响探析
- 基于众筹视角的中小企业融资问题研究
- 三亚健康养生旅游研究
- 房地产市场价格调控探究
- 我国自动售货机市场发展分析
- 基于VR技术的广州网络会展发展与趋势研究
- 辽宁装备制造业与生产性服务业融合发展的影响因素研究
- 新时期农村畜牧养殖业发展现状与未来趋势展望
- 四川天府新区产业发展研究
- 互联网新时代背景下湛江智慧农业发展问题与对策研究
- 论如何加强房地产企业资金内控管理水平
- 浅析家族上市公司非效率投资问题及对策
- 乘用车零部件进出口贸易解析与研究
- 对俄贸易前景及模式研究
- 试析如何做好产业园区自持物业项目投资可行性财务分析和成本管控
- 探讨如何加强高校财务预算管理
- 新医改背景下医院财务管理效率提高办法探讨研究
- “互联网+”背景下财务会计向管理会计转型的探析
- 关于事业单位预算管理和绩效考核的几点认识
- 乡镇政府固定资产管理探讨
- 基于资产清查视角下的高校资产管理与财务管理问题及策略
- 探讨新会计准则对企业财务管理实务的影响
- 如何实现新形势下医院统计工作创新
- 制衣业会计核算存在的问题及改进措施
- get round/around to sth/doing sth
- get round sb
- get round to sth
- gets
- gets about
- gets along
- gets around
- gets away
- gets back
- get sb back
- get sb down
- get sb excited
- get sb in
- get sb interested
- get sb into bed
- get (sb) off the hook
- get (sb) off the hook / let sb off the hook
- get sb off to sleep
- get sb/sth ready
- get sb/sth together
- get (sb) through (sth)
- get sb to do sth
- get sb to see reason
- get (sb) up
- get sb up/get sb out of bed
- 竭涸
- 竭知
- 竭精
- 竭精极思
- 竭精极虑
- 竭精殚力
- 竭精殚虑
- 竭精毕思
- 竭精驰说
- 竭绝
- 竭罄
- 竭老
- 竭能
- 竭能尽力
- 竭节
- 竭节输城
- 竭虑
- 竭诚
- 竭诚于教化
- 竭诚以待
- 竭诚则胡越为一体,傲物则骨肉为行路
- 竭诚尽忠
- 竭诚尽瘁
- 竭诚尽节
- 竭诚相待